基于动态网络结构的多视角HRRP雷达空中目标识别方法
本发明属于雷达信号处理,具体涉及一种基于动态网络结构的多视角hrrp雷达空中目标识别方法。
背景技术:
1、随着深度神经网络的发展,已经有越来越多的学者将其运用于高分辨距离像目标识别领域,但目前大部分学者的研究均基于单视角静态网络下的高分辨距离像目标识别。相对于多视角动态神经网络,单视角静态网络主要存在以下问题:
2、首先是单视角网络模型只有一个视角的特征输入。深度网络的识别性能往往与输入特征的数量直接挂钩,通过增加输入视角可以直接增加输入特征的数量。同时,除每个视角本身的特征外,多视角输入还隐含不同视角间的特征,同样可以提升网络的识别性能。其次是静态网络模型除不具备动态自适应能力外,还造成了资源的浪费。目前的一些静态网络模型能取得较好表现的部分原因是拥有足够的参数来充分表达所有目标。考虑到样本目标之间以及同一样本目标不同视角之间的差异性,采用统一的模型结构很难兼顾全部样本的高质量特征提取。同时,在当前复杂的识别环境和目标多样化背景下,若想兼顾全部识别目标,静态网络所需的参数将会越来越多。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于动态网络结构的多视角hrrp(高分辨距离像)雷达空中目标识别方法,将动态结构与动态参数相结合,提高网络的自适应能力,相对于静态单视角网络,在空中目标高分辨距离像识别任务中表现出更好的识别性能。
2、本发明采用的技术方案为:一种基于动态网络结构的多视角hrrp雷达空中目标识别方法,具体步骤如下:
3、s1、构建动态网络dspnn,包括:特征提取模块、特征融合识别模块;
4、s2、生成多视角hrrp数据,输入到网络的特征提取模块进行特征提取;
5、s3、基于步骤s2,将提取的特征输入特征融合识别模块进行处理,首先将各视角特征通过自适应权重门调整权重,将多视角特征加权融合成最终特征,然后,将多视角特征进行特征压缩与激活得到分类结果,完成目标识别。
6、进一步地,所述步骤s1具体如下:
7、s11、特征提取模块;
8、特征提取模块包括:6个门控跳层模块和1个动态卷积核模块;用于对多视角输入的hrrp数据进行动态特征提取,以残差网络为基本特征提取单元,并通过门控跳层机制和动态卷积核分别实现网络在结构和参数上的动态调整。
9、其中,所述门控跳层模块包括:1个全局平均池化层、2个全连接层、1个长短期记忆网络lstm、1个批标准化bn层、1个sigmoid激活函数以及1个残差块;用于根据前一层提取的高分辨距离像特征判断当前残差块是否执行。
10、所述残差块包括:2个卷积层、1个随机丢弃(dropout)层和2个relu激活函数。
11、所述lstm模块在工作过程中的输出的产生和传递是通过遗忘门、输入门、细胞状态更新和输出门接力完成。
12、其中,遗忘门用于决定前一跳层门控机制中lstm模块输出信息的保留程度;输入门用于决定当前门控跳层结构中lstm模块输入信息的保留程度;细胞状态更新用于确保不同lstm模块间参数的共享;输出门用于输出当前跳层门控结构中lstm的输出值,该值同时也被作为参数送至下一层门控跳层模块的lstm模块。
13、所述动态卷积核模块包括:1个注意力机制模块和l个卷积核;动态卷积核模块通过设置一个卷积核组,令网络根据不同样本的高分辨距离像特征为卷积核组的卷积核成员动态分配权重,然后根据权重加权求和得到针对该样本的卷积核。
14、其中,所述注意力机制模块包括:1个平均池化层、2个全连接层、1个relu激活函数以及一个softmax函数。
15、s12、特征融合识别模块;
16、特征融合识别模块包括:1个动态特征融合模块和1个识别模块;所述动态特征融合模块包括自适应权重模块,各视角特征首先通过自适应权重模块调整各自权重;然后,通过拼接组合成多视角特征送入识别模块;最后,通过特征压缩激活得到分类结果。
17、所述自适应权重模块包括:2个特征提取块、1个平均池化层、1个全连接层;用于实现不同视角特征图的权重计算。
18、其中,所述特征提取块包括:1个卷积层、1个bn层、1个sigmoid激活函数。
19、所述识别模块包括:1个卷积层、一个平均池化层、1个全连接层、1个softmax函数;用于实现分类识别。
20、进一步地,所述步骤s2具体如下:
21、选定特定角度范围(67°到112°)的方位角,每隔1°转动,每个角度下目标都存在一个hrrp数据,对每个hrrp数据做短时傅里叶变换,得到不同视角下hrrp数据的时间频率图,再把这若干个视角的时频图按每m个排列组合在一起,得到m视角的hrrp时频图。然后将生成的多视角hrrp数据输入到网络的特征提取模块。
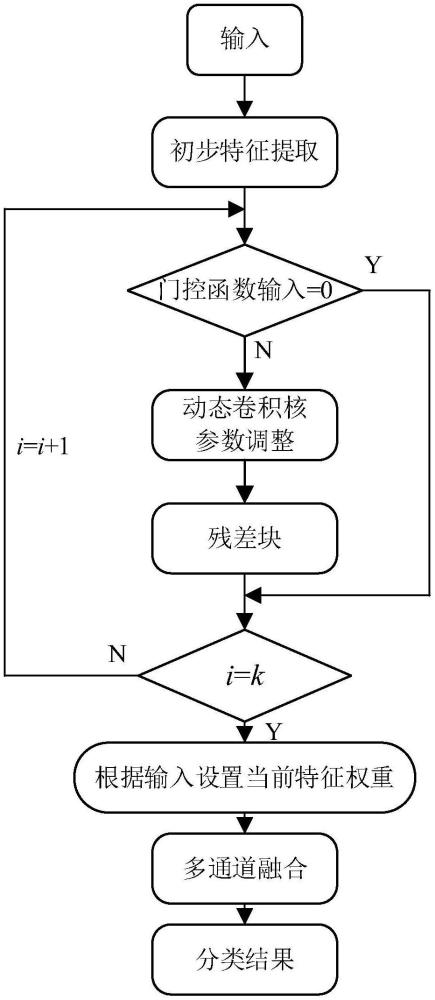
22、前一层门控跳层模块输出特征在进入下一层门控跳层模块后,首先经过全局平均池化层与全连接层提取前一门控跳层模块输出特征的全局信息;然后送入具有共享参数的lstm模块,lstm模块综合前置门控函数的信息输出当前特征结果并继续送入全连接层、bn层;最后送到sigmoid激活函数得到一个(0,1)区间的输出结果,将其二值化后作为门控跳层函数的输出,其数学表达式如下:
23、xi=s(i)f(xi-1)+(1-s(i))xi-1 (1)
24、其中,i表示当前所处残差块的编号;xi-1表示当前层输入特征,xi表示当前层输出;s(i)表示门控跳层函数的输出;f(xi-1)表示残差块处理过的输出。
25、当门控跳层函数的输出为1时,将输入送入动态卷积核模块参数调整后的残差块中进行处理,输出结果为f(xi-1);当门控跳层函数的输出为0时,输入特征将直接跳过当前残差块,输出结果为xi-1。当i不等于k时,说明还存在残差块,将输出送入下一层门控跳层模块;若等于k,则将输出送入特征融合识别模块进行权重调整并与其他视角的特征融合。
26、其中,k=6。
27、所述动态卷积核模块动态权重的实现具体如下:
28、首先,通过全局平均池化提取输入特征的全局信息;然后,通过两个全连接及relu激活函数学习输入的非线性特征;最后,通过softmax函数输出对应卷积核的特征权重。动态卷积的过程表达式如下:
29、
30、其中,z表示输入特征,y表示输出特征,c表示动态卷积操作;w(z)表示样本自适应生成的卷积核参数;l表示生成的权重个数;al(z)表示第l个注意力权值;wl表示第l个卷积核参数。
31、进一步地,所述步骤s3具体如下:
32、首先,输入特征经过两个特征提取块,平均池化层,全连接网络层得到该视角的权重。然后,根据权重将多视角进行加权并拼接;接着,通过卷积层和平均池化层进行特征压缩;最后,通过全连接网络将特征与目标种类建立映射,并通过softmax函数进行激活以得到不同类别的概率继而完成识别。
33、本发明的有益效果:本发明的方法首先构建动态网络dspnn,包括:特征提取模块、特征融合识别模块,然后生成多视角hrrp数据,输入到网络的特征提取模块进行特征提取,将提取的特征输入特征融合识别模块进行处理,首先将各视角特征通过自适应权重门调整权重,将多视角特征加权融合成最终特征,最后,将多视角特征进行特征压缩与激活得到分类结果,完成目标识别。发明的方法使用基于动态结构和动态参数的多视角识别方法,有效地提高了空中目标高分辨距离像识别网络的自适应能力,解决了单视角静态网络所存在的问题,进一步地提升了对空中目标的识别能力。
- 还没有人留言评论。精彩留言会获得点赞!