基于遗传算法的分层融合水下浑浊介质偏振成像方法
本发明基于遗传算法的分层融合水下浑浊介质偏振成像方法,涉及偏振成像方法,尤其涉及一种基于遗传算法的分层融合水下浑浊介质偏振成像方法。
背景技术:
1、随着水下机器人技术的发展,极大促进了人类对海洋的探索进程,水下机器人大多搭载成像系统来实现对未知环境的感知,清晰的水下图像对于海洋军事侦察、水下考古、海洋资源勘探非常重要。但由于水中存在悬浮颗粒、微生物,光在水下传播过程中被散射和吸收,导致水下图像对比度降低、细节丢失、噪声增大等问题。严重影响了水下成像的质量。水下偏振成像技术可以有效分离后向散射光和目标光,提高水下成像质量,但传统水下偏振成像方法通常对图像细节部分恢复效果不足,且需要人机交互手动选取无目标物的区域作为背景区域来计算后向散射光偏振度会造成误差。这些限制会导致图像恢复效果不足,无法实现水下降质图像的自动复原。
2、针对上述现有技术中所存在的问题,研究设计一种新型的基于遗传算法的分层融合水下浑浊介质偏振成像方法,从而克服现有技术中所存在的问题是十分必要的。
技术实现思路
1、根据上述现有技术提出的传统水下偏振成像方法在高后向散射介质浓度环境下恢复效果不佳,对图像细节部分恢复能力不足以及无法自动化复原等技术问题,而提供一种基于遗传算法的分层融合水下浑浊介质偏振成像方法,能够在较高后向散射介质浓度环境下有效复原图像细节部分且无需人机交互,有更好的恢复效果。
2、本发明采用的技术手段如下:
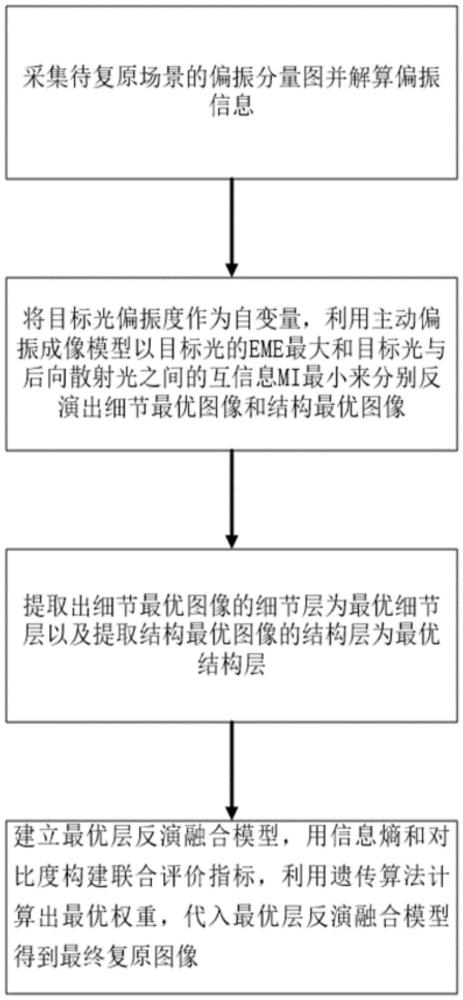
3、一种基于遗传算法的分层融合水下浑浊介质偏振成像方法包括如下步骤:
4、步骤1:采集待复原场景的偏振分量图并解算偏振信息;
5、步骤2:利用主动偏振成像模型反演出细节最优图像和结构最优图像;
6、步骤3:提取出细节最优图像的细节层为最优细节层以及提取结构最优图像的结构层为最优结构层;
7、步骤4:建立反演图像融合模型,将最优细节层和最优结构层进行加权融合,得到最终复原图像。
8、进一步地,步骤1采集待复原场景的偏振分量图并解算偏振信息采用的系统为水下主动偏振成像系统,
9、进一步地,水下主动偏振成像系统包括:探测器、检偏器、透明水箱、目标物、led光源、起偏器和后向散射介质;
10、进一步地,目标物设置于透明水箱内后部中心位置,后向散射介质设置于透明水箱内,位于目标物的前部;
11、进一步地,led光源和起偏器设置在透明水箱的前部一侧,led光源发出光束,经过起偏器部分偏振光束照射到目标物后进行反射,另一部分偏振光束照射到后向散射介质后进行反射;
12、进一步地,探测器和检偏器设置在透明水箱前部另一侧,分别与led光源和起偏器以透明水箱的中心对称设置;led光源发出的光束经过目标物和后向散射介质的反射后经过检偏器进入到探测器后构成目标光和后向散射光。
13、进一步地,起偏器对led光源发出的光束进行起偏作为主动偏振光束;
14、进一步地,起偏器的偏振方向固定,不进行旋转。
15、进一步地,后向散射介质由水箱中清水中加入25ml的脱脂牛奶构成。
16、进一步地,步骤1的采集方式为:旋转检偏器2,获取光强最亮和最暗两幅图像分别记作imax和imin;由于探测器接收到的目标光和后向散射光是一个堆叠的状态,这给后向散射光偏振度的估计带来了阻碍,为了解决这一问题,可以利用后向散射光和目标光的频域特性差异来区分,后向散射光在整幅图像上有良好的连续性,通常在整个图像中形成低频成分,为了在计算后向散射光偏振度过程中消除目标光的干扰,我们可以将imax和imin利用快速傅里叶变换到频域,并使用高斯低通滤波提取低频部分,并进行傅里叶反变换得到全局后向散射光分布;这个过程表示为:
17、
18、
19、式中和代表最亮和最暗图像的后向散射光部分,fft为快速傅里叶变换,fft-1代表快速傅里叶反变换,h(u,v)为低通滤波,代表卷积运算符。
20、计算后向散射光偏振度的全局分布为:
21、
22、进一步地,步骤2的反演方式为:根据传统主动偏振成像模型以及目标光和后向散射光的部分偏振特性可建立出目标光s和后向散射光b有如下模型:
23、
24、
25、式中:pscat为后向散射光偏振度,pobj为目标光偏振度;imax为最亮图像,imin为最暗图像;由式4、5可知,imax、imin、pscat、pobj是复原水下图像的重要参数;其中光强最大图像imax、光强最小图像imin和后向散射光偏振度pscat已经在步骤1中获取,为已知参量,目标光偏振度pobj为未知参量,由于偏振度的物理意义为光的偏振部分在总光强中的比例,故取值范围为0-1;首先,反演出目标光s的eme值最高时的pobj;其过程为:以目标光s的eme值为目标函数,以pobj为自变量,0.01为步长在0-1范围内开始迭代,迭代出目标光s的eme值最高时的目标光偏振度pobj值并代入到式4,得到细节最优图像ieme;再以目标光s和后向散射光b的互信息mi为目标函数,以0.01为步长在0-1范围内迭代出s和b互信息mi最小时的pobj代入到式4,得到结构最优图像imi;
26、其中:eme评价指标是评价图像细节的评价指标,是图像局域灰度变化程度的表现,图像局部灰度变化越强,图像的细节表现详细,计算出的eme值也越高,计算公式如下:
27、
28、mi(b,s)为互信息,用以表征后向散射光b与目标信息光s之间相关性;由于后向散射光和目标光的来源不同,所以后向散射光和目标光的互信息越小,证明分离的效果越好,也越符合客观规律,其表达式为:
29、
30、式中,b和s为()式计算所得后向散射光b与目标信息光s的图像灰度级;prob(b)和prob(s)为与的边缘分布函数;prob(b,s)为联合概率分布函数。
31、进一步地,步骤3的提取方式为:分离出细节最优图像ieme的r层reme和互信息最优图像imi的结构分量lmi;
32、图像是结构信息和图像纹理细节部分信息相乘的结果;一幅图像的构成既有代表图像细节的细节层,还有代表图像低频部分的结构层,也叫基础层;图像分解为细节层和结构层,用细节分量和结构分量相乘可以表示一幅图像;其数学表达式为:
33、i(x,y)=l(x,y)*r(x,y) (8)
34、式中:i为原始图像,l为结构分量,r为细节分量;
35、由于人眼对图像亮度的感知是非线性的,与对数曲线相近,同时,转换到对数域计算也可以将上述过程的乘法转换为加法,降低了运算量,因此将式进行对数变换:
36、logi( x ,y) =log l(x,y ) +logr (x, y ) (9)
37、结构分量l相对平滑保有大量的低频信息,细节分量r含有大量场景中的高频信息,提取出场景中的低频部分作为结构层,其过程是首先通过快速傅里叶变换将强度图像变换到频域,然后与滤波器的传递函数相乘,乘法的结果通过快速傅里叶反变换返回到强度图像;
38、
39、l(x,y)表示结构分量,fft-1表示傅里叶反变换,fft表示傅里叶变换,i(x,y)代表强度图像,表示卷积,h(x,y)代表高斯低通滤波;
40、细节分量捕捉场景中的细节信息,对场景中细节部分的提取过程如下:
41、logr(x,y)=logi(x,y)-logl(x,y) (11)
42、由上述过程将图像分解为细节分量和结构分量,l层相对平滑保有大量的低频信息,捕捉场景中的结构信息,r层含有大量场景中的高频信息,捕捉场景中的细节信息;分离出细节最优图像ieme的r层reme和互信息最优图像imi的结构分量lmi。
43、进一步地,步骤4得到最终恢复图像的方式为:建立最优细节层reme和最优结构层lmi的融合模型,构建联合评价指标,并通过遗传算法计算出融合模型中的最优权重并代入到模型中得到最终重构图像;
44、由于水下浑浊图像存在细节信息丢失严重的问题,为了提升图像质量,将细节最优图像的细节层和互信息最有图像的结构层进行加权融合,得到重构图像,这个过程表示为:
45、ifinal=αreme(x,y)+βlmi(x,y) (12)
46、式中:α代表细节层的权重系数,β代表结构层的权重系数,ifinal为最终清晰化重构图像;
47、式中:α代表细节层的权重系数,β代表结构层的权重系数,ifinal为最终清晰化重构图像;
48、这里将细节层的权重α和结构层权重β的选取转化为一个智能优化问题,采用遗传算法(ga)进行搜寻,为了兼顾最终清晰化重构图像的多评价指标,使重构图像具有高对比度的同时,具有高信息熵,来防止只追求单一的对比度最高导致图像过曝、信息丢失,引入线性函数f(ch)作为联合评价指标,其表达式如下:
49、f(ch)=0.5c+0.5h (13)
50、其中信息熵entropy用于表征图像中蕴含平均信息量的多少,其以统计学的角度对图像进行分析,信息熵的表达式为:
51、
52、式中,pk(k=1,2,3…,n)表示每一灰度级出现的概率,n为灰度级总数。图像信息熵的值越大,说明该图像所蕴藏的信息越多,图像质量越好;其中对比度c是衡量水下图像质量的有效参数,对比度越高图像质量越好,对比度公式如下:
53、
54、其中n代表图像总像素数,i为图像灰度的平均值,i(x,y)代表像素点(x,y)处的灰度值;
55、将联合评价指标f(ch)作为遗传算法的适应度函数,获得权重系数α和β的最优解后,将α、β代入式(12)中,求得最终优化图像ifinal,遗传算法求取最优权重α和β的算法流程图。
56、较现有技术相比,本发明具有以下优点:
57、针对传统水下主动偏振成像方法使用单指标反演偏振参数的局限性以及传统方法对水下浑浊恢复细节恢复不足的问题,提出一种基于遗传算法的分层融合水下浑浊介质偏振成像方法,在成像过程中考虑了多种评价指标,进一步提升水下偏振图像清晰化质量。首先通过主动偏振成像模型分别反演出针对eme和背景光与目标光互信息mi这两种评价指标的最优图像。然后,分解出eme最优图像的细节层和mi最优图像的结构层进行加权融合,最后,通过遗传算法以对比度和信息熵为目标函数求出加权融合的最优权重系数。可以提升视觉系统在海洋环境下的感知能力,为后续需要视觉感知的深海无人化作业打下基础。
58、综上,应用本发明的技术方案解决了现有技术中的传统水下偏振成像方法在高后向散射介质浓度环境下恢复效果不佳,对图像细节部分恢复能力不足以及无法自动化复原等问题。
- 还没有人留言评论。精彩留言会获得点赞!