一种针对海缆故障位置的智能化确定方法及装置与流程
本发明涉及海上风电场海缆运维,尤其涉及一种针对海缆故障位置的智能化确定方法及装置。
背景技术:
1、随着海上风电的大规模发展,海底电缆也广泛应用于海上风电场的海底输配电网中,随之海缆故障检测及维修项目成为一大研究热点,其中,海缆故障检测包括海缆故障位置检测及确定。
2、当前,关于海缆故障位置的确定方式主要为管理人员基于系统返回的海缆数据、拍摄到的海缆图像,人为通过肉眼及主观意识来大致判定海缆的故障位置,然而,以主观意识进行海缆故障位置确定会受到多方面因素的影响,比如管理人员在进行海缆故障位置确定时精神状态不佳、不同管理人员对于分析同一海缆数据的考虑方向和侧重点不同等,都会在一定程度上使得即便是同一条件下针对同一海缆的故障位置确定结果也会存在偏差,使得海缆故障位置的确定效率及准确性低,因此,现有的海缆故障位置确定方式存在海缆故障位置的确定效率及准确性低的问题。可见,提供一种新的海缆故障位置确定方式以提高海缆故障位置的确定效率及准确性显得尤为重要。
技术实现思路
1、本发明提供了一种针对海缆故障位置的智能化确定方法及装置,能够提高海缆故障位置的确定效率及准确性。
2、为了解决上述技术问题,本发明第一方面公开了一种针对海缆故障位置的智能化确定方法,所述方法包括:
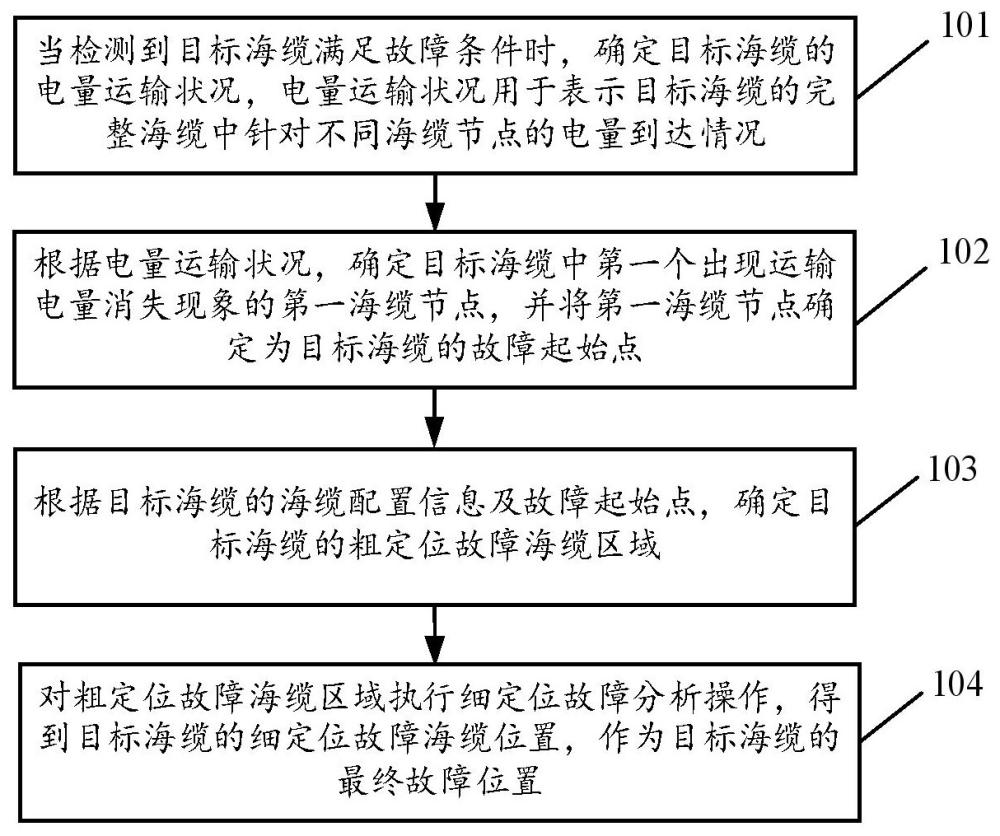
3、当检测到目标海缆满足故障条件时,确定所述目标海缆的电量运输状况,所述电量运输状况用于表示所述目标海缆的完整海缆中针对不同海缆节点的电量到达情况;
4、根据所述电量运输状况,确定所述目标海缆中第一个出现运输电量消失现象的第一海缆节点,并将所述第一海缆节点确定为所述目标海缆的故障起始点;
5、根据所述目标海缆的海缆配置信息及所述故障起始点,确定所述目标海缆的粗定位故障海缆区域;
6、对所述粗定位故障海缆区域执行细定位故障分析操作,得到所述目标海缆的细定位故障海缆位置,作为所述目标海缆的最终故障位置。
7、作为一种可选的实施方式,在本发明第一方面中,所述对所述粗定位故障海缆区域执行细定位故障分析操作,得到所述目标海缆的细定位故障海缆位置,包括:
8、确定处于所述粗定位故障海缆区域的周边区域的船舶信息,并根据所述船舶信息,分析综合船舶行驶现象,所述综合船舶行驶现象包括处于所述粗定位故障海缆区域的周边区域的目标船舶对应的船舶行驶现象;
9、根据所述综合船舶行驶现象,判断所述粗定位故障海缆区域是否满足预设的海缆故障造成条件;
10、当判断出所述粗定位故障海缆区域满足所述海缆故障造成条件时,根据所述船舶信息及确定出的所述目标船舶的实际位置信息,从所述粗定位故障海缆区域中确定出现船舶破坏海缆现象对应的第一具体海缆位置,并将所述第一具体海缆位置确定为所述目标海缆的细定位故障海缆位置;
11、当判断出所述粗定位故障海缆区域不满足所述海缆故障造成条件时,确定所述目标海缆的投入使用信息,并根据所述投入使用信息及所述海缆配置信息,从所述粗定位故障海缆区域中确定出现海缆自故障现象对应的第二具体海缆位置,并将所述第二具体海缆位置确定为所述目标海缆的细定位故障海缆位置。
12、作为一种可选的实施方式,在本发明第一方面中,所述根据所述船舶信息及确定出的所述目标船舶的实际位置信息,从所述粗定位故障海缆区域中确定出现船舶破坏海缆现象对应的第一具体海缆位置,包括:
13、根据所述船舶信息及确定出的所述目标船舶的实际位置信息,确定每一所述目标船舶的当前船舶状态,并根据每一所述目标船舶的当前船舶状态,从所有所述目标船舶中确定出基础异常船舶及严重异常船舶;
14、对于所述基础异常船舶,根据确定出的所述基础异常船舶的实际位置信息及预期行驶轨迹,分析所述目标海缆对所述基础异常船舶造成的行驶影响信息;根据所述行驶影响信息,预测对所述基础异常船舶造成影响的第一预测子海缆区域;
15、对于所述严重异常船舶,根据确定出的所述严重异常船舶的船身破损类型及破损情况,分析所述严重异常船舶针对所述目标海缆的冲撞力度及冲撞速度,并确定所述严重异常船舶与所述目标海缆发生冲撞所对应的船身冲撞点及所述船身冲撞点的方位信息;根据所述冲撞力度、所述冲撞速度、所述严重异常船舶的实际位置信息及所述船身冲撞点的方位信息,预测被所述严重异常船舶造成影响的第二预测子海缆区域;
16、根据所述第一预测子海缆区域及所述第二预测子海缆区域,确定出现船舶破坏海缆现象对应的第一具体海缆位置;
17、其中,所述粗定位故障海缆区域包括所述第一预测子海缆区域及所述第二预测子海缆区域。
18、作为一种可选的实施方式,在本发明第一方面中,所述根据所述投入使用信息及所述海缆配置信息,从所述粗定位故障海缆区域中确定出现海缆自故障现象对应的第二具体海缆位置,包括:
19、根据所述投入使用信息,确定所述粗定位故障海缆区域对应的使用时限信息;根据所述使用时限信息及所述海缆配置信息,从所述粗定位故障海缆区域中筛选出满足预设的使用时限维修条件的第三预测子海缆区域;
20、根据所述投入使用信息,确定所述粗定位故障海缆区域对应的流经液体信息,所述流经液体信息包括流经液体性质信息、流经液体流量信息及流经液体流速信息中的一种或多种;根据所述流经液体信息及所述海缆配置信息,从所述粗定位故障海缆区域中筛选出满足预设的流经液体腐蚀条件的第四预测子海缆区域;
21、根据所述第三预测子海缆区域及所述第四预测子海缆区域,确定出现海缆自故障现象对应的第二具体海缆位置。
22、作为一种可选的实施方式,在本发明第一方面中,所述根据所述综合船舶行驶现象,判断所述粗定位故障海缆区域是否满足预设的海缆故障造成条件,包括:
23、根据所述综合船舶行驶现象,判断所有所述目标船舶中是否存在满足停滞行驶条件的停滞船舶;
24、当判断出所有所述目标船舶中不存在所述停滞船舶时,确定所有所述目标船舶对应的行驶轨迹信息,并根据所述行驶轨迹信息,判断所有所述目标船舶中是否存在满足异常行驶条件的行驶船舶;
25、当判断出所述目标船舶中存在所述行驶船舶时,确定所述粗定位故障海缆区域满足预设的海缆故障造成条件;
26、当判断出所述目标船舶中不存在所述行驶船舶时,确定所述粗定位故障海缆区域不满足预设的海缆故障条件;
27、当判断出所有所述目标船舶中存在所述停滞船舶时,确定所述停滞船舶的船身破损信息,并根据所述船身破损信息,判断所述停滞船舶是否满足预设的冲撞海缆导致船身破损的破损造成条件;
28、当判断出所述停滞船舶满足所述破损造成条件时,确定所述粗定位故障海缆区域满足预设的海缆故障造成条件;
29、当判断出所述停滞船舶不满足所述破损造成条件时,确定所述粗定位故障海缆区域不满足预设的海缆故障造成条件。
30、作为一种可选的实施方式,在本发明第一方面中,所述根据所述行驶轨迹信息,判断所有所述目标船舶中是否存在满足异常行驶条件的行驶船舶,包括:
31、根据所述行驶轨迹信息,确定每一所述目标船舶的实际行驶轨迹,并确定每一所述目标船舶的预期行驶轨迹;
32、根据每一所述目标船舶的实际行驶轨迹及预期行驶轨迹、所述粗定位故障海缆区域的区域位置信息,分析每一所述目标船舶的行驶合理性;
33、判断所有所述行驶合理性是否皆大于等于预设的行驶合理性阈值;
34、当判断出所有所述行驶合理性皆大于等于所述行驶合理性阈值时,确定所有所述目标船舶中不存在满足异常行驶条件的行驶船舶;
35、当判断出并非所有所述行驶合理性皆大于等于所述行驶合理性阈值时,确定所有所述目标船舶中存在满足异常行驶条件的行驶船舶。
36、作为一种可选的实施方式,在本发明第一方面中,所述根据所述船身破损信息,判断所述停滞船舶是否满足预设的冲撞海缆导致船身破损的破损造成条件,包括:
37、根据所述船身破损信息,确定所述停滞船舶对应的至少一处船身破损区域,并根据所述船身破损信息,确定每一所述船身破损区域对应的破损类型及破损情况;
38、对于每一所述船身破损区域,根据该船身破损区域的破损类型及破损情况,分析由于船舶冲撞海缆造成该船身破损区域的破损可能性;
39、判断所有所述破损可能性是否皆大于等于预设的破损可能性阈值;
40、当判断出所有所述破损可能性皆大于等于所述破损可能性阈值时,确定所述停滞船舶满足预设的冲撞海缆导致船身破损的破损造成条件;
41、当判断出并非所有所述破损可能性皆大于等于所述破损可能性阈值时,确定所述停滞船舶不满足预设的冲撞海缆导致船身破损的破损造成条件。
42、本发明第二方面公开了一种针对海缆故障位置的智能化确定装置,所述装置包括:
43、确定模块,用于当检测到目标海缆满足故障条件时,确定所述目标海缆的电量运输状况,所述电量运输状况用于表示所述目标海缆的完整海缆中针对不同海缆节点的电量到达情况;
44、起始点确定模块,用于根据所述电量运输状况,确定所述目标海缆中第一个出现运输电量消失现象的第一海缆节点,并将所述第一海缆节点确定为所述目标海缆的故障起始点;
45、故障粗定位模块,用于根据所述目标海缆的海缆配置信息及所述故障起始点,确定所述目标海缆的粗定位故障海缆区域;
46、故障细定位模块,用于对所述粗定位故障海缆区域执行细定位故障分析操作,得到所述目标海缆的细定位故障海缆位置,作为所述目标海缆的最终故障位置。
47、作为一种可选的实施方式,在本发明第二方面中,所述故障细定位模块对所述粗定位故障海缆区域执行细定位故障分析操作,得到所述目标海缆的细定位故障海缆位置的方式具体包括:
48、确定处于所述粗定位故障海缆区域的周边区域的船舶信息,并根据所述船舶信息,分析综合船舶行驶现象,所述综合船舶行驶现象包括处于所述粗定位故障海缆区域的周边区域的目标船舶对应的船舶行驶现象;
49、根据所述综合船舶行驶现象,判断所述粗定位故障海缆区域是否满足预设的海缆故障造成条件;
50、当判断出所述粗定位故障海缆区域满足所述海缆故障造成条件时,根据所述船舶信息及确定出的所述目标船舶的实际位置信息,从所述粗定位故障海缆区域中确定出现船舶破坏海缆现象对应的第一具体海缆位置,并将所述第一具体海缆位置确定为所述目标海缆的细定位故障海缆位置;
51、当判断出所述粗定位故障海缆区域不满足所述海缆故障造成条件时,确定所述目标海缆的投入使用信息,并根据所述投入使用信息及所述海缆配置信息,从所述粗定位故障海缆区域中确定出现海缆自故障现象对应的第二具体海缆位置,并将所述第二具体海缆位置确定为所述目标海缆的细定位故障海缆位置。
52、作为一种可选的实施方式,在本发明第二方面中,所述故障细定位模块根据所述船舶信息及确定出的所述目标船舶的实际位置信息,从所述粗定位故障海缆区域中确定出现船舶破坏海缆现象对应的第一具体海缆位置的方式具体包括:
53、根据所述船舶信息及确定出的所述目标船舶的实际位置信息,确定每一所述目标船舶的当前船舶状态,并根据每一所述目标船舶的当前船舶状态,从所有所述目标船舶中确定出基础异常船舶及严重异常船舶;
54、对于所述基础异常船舶,根据确定出的所述基础异常船舶的实际位置信息及预期行驶轨迹,分析所述目标海缆对所述基础异常船舶造成的行驶影响信息;根据所述行驶影响信息,预测对所述基础异常船舶造成影响的第一预测子海缆区域;
55、对于所述严重异常船舶,根据确定出的所述严重异常船舶的船身破损类型及破损情况,分析所述严重异常船舶针对所述目标海缆的冲撞力度及冲撞速度,并确定所述严重异常船舶与所述目标海缆发生冲撞所对应的船身冲撞点及所述船身冲撞点的方位信息;根据所述冲撞力度、所述冲撞速度、所述严重异常船舶的实际位置信息及所述船身冲撞点的方位信息,预测被所述严重异常船舶造成影响的第二预测子海缆区域;
56、根据所述第一预测子海缆区域及所述第二预测子海缆区域,确定出现船舶破坏海缆现象对应的第一具体海缆位置;
57、其中,所述粗定位故障海缆区域包括所述第一预测子海缆区域及所述第二预测子海缆区域。
58、作为一种可选的实施方式,在本发明第二方面中,所述故障细定位模块根据所述投入使用信息及所述海缆配置信息,从所述粗定位故障海缆区域中确定出现海缆自故障现象对应的第二具体海缆位置的方式具体包括:
59、根据所述投入使用信息,确定所述粗定位故障海缆区域对应的使用时限信息;根据所述使用时限信息及所述海缆配置信息,从所述粗定位故障海缆区域中筛选出满足预设的使用时限维修条件的第三预测子海缆区域;
60、根据所述投入使用信息,确定所述粗定位故障海缆区域对应的流经液体信息,所述流经液体信息包括流经液体性质信息、流经液体流量信息及流经液体流速信息中的一种或多种;根据所述流经液体信息及所述海缆配置信息,从所述粗定位故障海缆区域中筛选出满足预设的流经液体腐蚀条件的第四预测子海缆区域;
61、根据所述第三预测子海缆区域及所述第四预测子海缆区域,确定出现海缆自故障现象对应的第二具体海缆位置。
62、作为一种可选的实施方式,在本发明第二方面中,所述故障细定位模块根据所述综合船舶行驶现象,判断所述粗定位故障海缆区域是否满足预设的海缆故障造成条件的方式具体包括:
63、根据所述综合船舶行驶现象,判断所有所述目标船舶中是否存在满足停滞行驶条件的停滞船舶;
64、当判断出所有所述目标船舶中不存在所述停滞船舶时,确定所有所述目标船舶对应的行驶轨迹信息,并根据所述行驶轨迹信息,判断所有所述目标船舶中是否存在满足异常行驶条件的行驶船舶;
65、当判断出所述目标船舶中存在所述行驶船舶时,确定所述粗定位故障海缆区域满足预设的海缆故障造成条件;
66、当判断出所述目标船舶中不存在所述行驶船舶时,确定所述粗定位故障海缆区域不满足预设的海缆故障条件;
67、当判断出所有所述目标船舶中存在所述停滞船舶时,确定所述停滞船舶的船身破损信息,并根据所述船身破损信息,判断所述停滞船舶是否满足预设的冲撞海缆导致船身破损的破损造成条件;
68、当判断出所述停滞船舶满足所述破损造成条件时,确定所述粗定位故障海缆区域满足预设的海缆故障造成条件;
69、当判断出所述停滞船舶不满足所述破损造成条件时,确定所述粗定位故障海缆区域不满足预设的海缆故障造成条件。
70、作为一种可选的实施方式,在本发明第二方面中,所述故障细定位模块根据所述行驶轨迹信息,判断所有所述目标船舶中是否存在满足异常行驶条件的行驶船舶的方式具体包括:
71、根据所述行驶轨迹信息,确定每一所述目标船舶的实际行驶轨迹,并确定每一所述目标船舶的预期行驶轨迹;
72、根据每一所述目标船舶的实际行驶轨迹及预期行驶轨迹、所述粗定位故障海缆区域的区域位置信息,分析每一所述目标船舶的行驶合理性;
73、判断所有所述行驶合理性是否皆大于等于预设的行驶合理性阈值;
74、当判断出所有所述行驶合理性皆大于等于所述行驶合理性阈值时,确定所有所述目标船舶中不存在满足异常行驶条件的行驶船舶;
75、当判断出并非所有所述行驶合理性皆大于等于所述行驶合理性阈值时,确定所有所述目标船舶中存在满足异常行驶条件的行驶船舶。
76、作为一种可选的实施方式,在本发明第二方面中,所述故障细定位模块根据所述船身破损信息,判断所述停滞船舶是否满足预设的冲撞海缆导致船身破损的破损造成条件的方式具体包括:
77、根据所述船身破损信息,确定所述停滞船舶对应的至少一处船身破损区域,并根据所述船身破损信息,确定每一所述船身破损区域对应的破损类型及破损情况;
78、对于每一所述船身破损区域,根据该船身破损区域的破损类型及破损情况,分析由于船舶冲撞海缆造成该船身破损区域的破损可能性;
79、判断所有所述破损可能性是否皆大于等于预设的破损可能性阈值;
80、当判断出所有所述破损可能性皆大于等于所述破损可能性阈值时,确定所述停滞船舶满足预设的冲撞海缆导致船身破损的破损造成条件;
81、当判断出并非所有所述破损可能性皆大于等于所述破损可能性阈值时,确定所述停滞船舶不满足预设的冲撞海缆导致船身破损的破损造成条件。
82、本发明第三方面公开了另一种针对海缆故障位置的智能化确定装置,所述装置包括:
83、存储有可执行程序代码的存储器;
84、与所述存储器耦合的处理器;
85、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明第一方面公开的一种针对海缆故障位置的智能化确定方法。
86、本发明第四方面公开了一种计算机存储介质,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明第一方面公开的一种针对海缆故障位置的智能化确定方法。
87、与现有技术相比,本发明实施例具有以下有益效果:
88、本发明实施例中,当检测到目标海缆满足故障条件时,确定该目标海缆的电量运输状况,该电量运输状况用于表示该目标海缆的完整海缆中针对不同海缆节点的电量到达情况;根据该电量运输状况,确定该目标海缆中第一个出现运输电量消失现象的第一海缆节点,并将该第一海缆节点确定为该目标海缆的故障起始点;根据该目标海缆的海缆配置信息及该故障起始点,确定该目标海缆的粗定位故障海缆区域;对该粗定位故障海缆区域执行细定位故障分析操作,得到该目标海缆的细定位故障海缆位置,作为该目标海缆的最终故障位置。可见,本发明能够对目标海缆执行粗定位故障分析操作及细定位故障分析操作以得到目标海缆的最终故障位置,有利于提高针对海缆故障位置的智能化确定方式的全面性、整体性及合理性,进而有利于提高确定出的海缆故障位置的准确性和可靠性,以及还有利于提高海缆故障位置的确定效率及确定便捷性,从而有利于提高基于海缆故障位置的海缆故障处理及时性和准确性,进一步有利于提高海缆的运行稳定性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!