为煤矿立井井筒提供铅垂测量基准的方法
本发明提出一种为煤矿立井井筒提供铅垂测量基准的方法,属于测量。
背景技术:
1、煤矿井筒是连接地下资源开采和地面生产系统的必经通道,同时也承担着开采安全的重任,对井筒和罐道定期进行变形检测,对井筒提升容器的安全运作,煤矿安全高效生产有着重要意义。目前,在井筒整体范围内提供统一测量基准的方法主要有:钢丝垂线法、激光垂准法、惯性导航法。而这些方法存在如下几个主要问题:
2、(1)钢丝垂线法:钢丝悬挂操作繁琐,受风力、淋水等影响,钢丝会发生摆动、偏移时,将会造成较大误差,难以保证精度,且该方法主要为人工测量的监测方式提供基准,难以为自动化监测的方式提供基准;
3、(2)激光垂准法:该方法所发射激光的铅锤度只能通过水准器整平来保障,基准线的铅锤度将不可避免的受到仪器制造精度和安装整平精度的影响,随着测量距离的增加,少量的误差都会对测量结果产生巨大的影响;
4、(3)惯性导航法:随着监测深度的增大,惯导传感器的测量结果往往存在累积误差,且高精度的惯导传感器价格较为昂贵;
5、针对如上几个问题,亟需提出一种精度更加可靠的方法,为井筒的自动化变形监测工作提供整体范围的测量基准。
6、刘尚国等在doi号为: cnki:sun:mkaq.0.2019-12-028的期刊论文《基于激光准直的深井井筒垂直度检测方法》中设计加工了连接构建,将激光指向仪安装在全站仪通用调平基座上,通过调整基座脚螺旋使指向激光竖直向下发射,并提出了对激光铅垂基准进行校正的方法,其实施过程如下:将改造的铅垂仪在井架上安装固定,并借助全站仪水准器进行整平;将测量平台随罐笼运行至一定深度(如井深的1/2),打开垂准光束;依次按90°旋转激光铅垂仪,记录4个对称的激光光斑中心,取4个位置的中心作为基准点;在井架上微动全站仪脚螺旋,将光束精确调整至基准点;升降罐笼和测量平台至新位置,旋转激光铅垂仪检查激光光斑中心是否偏移,若偏移量大于1 mm,重复上述步骤。该方案解决了钢丝垂线法定向基线摆动偏移的问题,通过上述激光铅垂基准校正方法,减小了激光轴与基座竖轴不同轴导致的误差,但仍然未能解决基座整平误差对激光铅垂度造成的影响。
技术实现思路
1、发明目的:针对现有技术的不足之处,提出了一种为煤矿立井井筒提供铅垂测量基准的方法,其步骤简单,使用方便,利用补偿调教快速获得立井的铅垂基准。
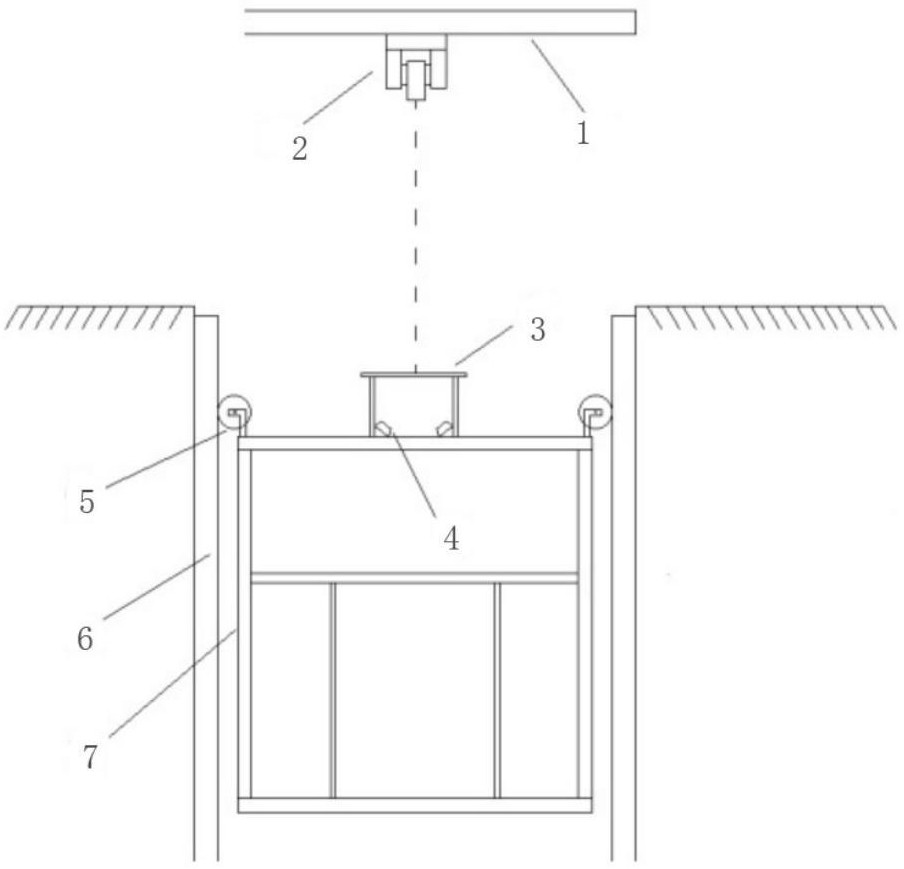
2、为实现上述技术目的,本发明公开一种为煤矿立井井筒提供铅垂测量基准的方法,在立井上设置激光垂准仪,在罐道中的提升容器顶部设置激光接收器,激光接收器用以接收激光垂准仪的激光投点并实时记录接受到的激光投点坐标信息;通过同步记录提升容器在罐道中升降距离信息以及同步接收到的激光投点坐标信息,剔除掉由于激光垂准仪自身设备问题导致的扩散明显不合理的激光点坐标以及部分因为立井井段变形导致的大偏移激光点坐标后,将剩下的激光坐标根据深度距离信息拟合为直线,计算直线的斜率,即可利用斜率补偿校正,从而获得准确的铅垂基准。
3、具体步骤如下:
4、将提升容器提升至立井进口位置,调整设置在井口上方井架设置的激光垂准仪,利用水平仪调整激光垂准仪的激光竖直向下发射,同时调整激光接收器位置,激光接收器包括激光接收靶和拍摄激光接收靶上接收到的激光投点的摄像头,使激光投点至激光接收靶的中心;
5、通过提升容器连接的绞车房内钢绞线的行程获取提升容器在罐道中运行的深度数据,对应激光接收靶上获取激光垂准仪上激光投点的高程值;激光接收靶获取的激光投点坐标值在提升容器运行过程中会发生变化,激光接收靶在每个深度位置接收到的激光投点平面坐标值中包含5个成分:初始坐标值、罐道变形值、非罐道变形引起的提升容器震动值、投点坐标识别误差、垂准激光铅垂度偏差值;
6、激光接收靶随提升容器在整个井筒竖向范围内上下运行,通过摄像头记录和识别提升容器在罐道中每个深度位置激光投点的平面坐标值;
7、对提升容器从井口运行至井底过程中摄像头识别并记录激光接收靶上激光投点坐标数据,并对激光投点坐标数据进行处理:分解出每个坐标值中激光铅垂度偏差成分并去除,以减小垂准激光不铅垂对测量基准精度造成的影响。
8、进一步,所述初始坐标值、罐道变形值、非罐道变形引起的提升容器震动值、投点坐标识别误差、垂准激光铅垂度偏差值分别表示:
9、初始坐标值:在井口位置安置好激光接收器时,激光投点的水平坐标值,即激光接收靶中心点的坐标值,每个深度位置的激光投点坐标都包含该成分;
10、罐道变形值:由于罐道产生变形,受罐道限制的提升容器产生水平移动,导致激光投点坐标发生变化,而罐道变形情况只会在井筒的局部位置出现,因此只有局部的激光投点坐标包含该成分;
11、非罐道变形引起的提升容器震动值:由于罐耳与罐道之间预留有一定的间隙或缓冲空间,提升容器在运行过程中会在此空间范围内产生随机震动,可以认为每个深度位置的激光投点坐标都随机包含该成分;
12、投点坐标识别误差:使用摄像头对投点至激光接收靶上的光斑中心坐标进行识别存在识别误差,每个深度位置的激光投点坐标都随机包含该成分;
13、垂准激光铅垂度偏差值:由于激光垂准仪制造误差和安装时的整平误差,在井口向下发射的激光并不是铅垂于水平面的,这将导致不同深度位置激光投点的坐标中都包含由激光不铅垂引起的偏差值,且深度越大该偏差值也越大。
14、进一步,去除坐标值中激光铅垂度偏差成具体步骤为:分别对每个坐标值中激光点的x坐标和y坐标进行校正,其中x坐标的校正步骤如下:
15、s1、将提升容器从井口运行至井底过程中获取的激光投点数据按照立井深度进行分组;
16、s2、以激光投点竖向深度值z为横坐标,x坐标作为纵坐标,得到每个激光投点对应的数据点坐标(z,x),利用直线拟合法根据每一组数据点分别拟合直线,得到每组直线的斜率;
17、s3、将每组数据点拟合直线的斜率取绝对值,再从第二组开始,将每组数据点拟合直线斜率的绝对值与上一组数据点拟合直线斜率的绝对值作差得到斜率差;
18、;
19、s4、若斜率差值大于0.004,则认为该组数据存在罐道变形成分,删除该组数据点;
20、s5、将数据点中所包含的非罐道变形引起的提升容器震动值和激光投点坐标识别误差值认为是随机且对称分布的,用最小二乘法对剩余的所有激光投点对应的数据点进行直线拟合,通过直线拟合后,提升容器震动值和激光投点坐标识别误差值将被削弱,所得直线即为存在铅垂偏差的激光直线在xoz平面上的投影,xoz平面为投点激光坐标所在坐标系的x轴和z轴所构成的平面,激光在xoz平面上投影直线的方程为:
21、;
22、其中为该激光直线在深度处对应的x坐标值,将采集到的激光投点从井口向井底方向排序t=1,2,3…,k为激光在xoz平面上投影直线的斜率,b为激光直线的截距即初始x坐标值;
23、s6、将每个激光投点的深度值所对应的拟合直线上点的x坐标减去井口处获取的第一个激光投点的x坐标值b,即可得到每个激光投点x坐标值中的垂准激光铅垂度偏差值δxt;
24、;
25、s7、将每个激光点的x坐标值减去该激光点对应深度处的垂准激光铅垂度偏差值δx,从而修正偏差,获得x坐标的校正值;具体利用以下公式去除激光偏差的影响,计算深度处对应的激光投点x坐标校正结果值:
26、;
27、重复步骤s2~s7,将校正激光投点x坐标的内容替换为校正激光投点y坐标,分别对x方向和y方向的偏差情况完成校正。
28、进一步,直线拟合法包括最小二乘法、加权最小二乘法、奇异值分解法、梯度下降法。
29、进一步,通过分组直线拟合法拟合直线后,对比组间直线斜率差值对受罐道变形影响的激光投点数据进行识别和去除,包括滑动平均滤波法、中值滤波法、卡尔曼滤法。
30、进一步,重复获取两次同一立井中的激光投点数据,并通过对比前后两次采集的激光投点坐标数据,计算点位差值中误差,通过同一深度位置两次测得的激光点坐标差值的中误差大小来判断精度:
31、
32、
33、++……+
34、++……+
35、
36、其中,和分别为在x方向和y方向上同一深度位置两次测得的激光点坐标的差值中误差,和分别为前后两次数据中第n个激光投点的x坐标,和分别为前后两次数据中第n个点的y坐标,为激光投点坐标差值中误差。
37、有益效果:1)本方法通过数据后处理的方式,对仪器设备制造误差和安装整平误差导致的垂准激光铅垂度偏差进行了校正,提高了测量基准的精度;2)本方法中使用的设备只需在井口进行安装调试,不需要技术人员随提升容器下井对设备进行调校,提高了作业过程的便捷性和安全性;3)本方法步骤简单,使用快捷方便,利用补偿调教快速获得立井的铅垂线。
- 还没有人留言评论。精彩留言会获得点赞!