一种薄膜传感器动态力学标定方法及装置与流程
本发明涉及薄膜传感器标定,具体涉及一种薄膜传感器动态力学标定方法及装置。
背景技术:
1、随着可穿戴电子、软体机器人以及人工智能等技术的不断发展和成熟,柔性压电薄膜压力传感器的应用场景及应用潜力越来越受到产业界的关注。柔性压电薄膜压力传感器与传统块体式压电传感器相比具备明显的优势,其结构适形容易、安装方便、设计灵活以及低成本的优势均是传统块体无法比拟的。但是薄膜类压力传感器的标定是阻碍其大范围应用和推广的主要原因。传统的标定方法,主要包括落锤标定法、激波管标定法、振动台标定法、霍普金森杆法等,这些方法存在所需测试设备体积庞大、定量化控制精度低,实验周期长且成本高昂、无法对薄膜传感器这种高精度的器件进行大批量的有效标定等缺点。
2、现有中国专利,公开号为cn110082029a的专利公开了一种pvdf压电薄膜传感器动态力学特性标定方法,该公开的专利是基于霍普金森杆的标定方法,将pvdf薄膜传感器贴在杆子的侧面,利用弹性波理论进行标定,但上述专利存在精度不足且计算复杂,无法大规模应用的问题。同时,中国专利,公开号为cn115389098a的专利公开了一种自由落体冲击传感器标定装置,该公开的专利在下方安装有标定传感器,以导向杆为中轴,控制落锤的方向。由于一圈有很多个传感器,所以要求落锤与传感器的接触时间一致才能得到准确的标定结果,因此该装置对于结构精度要求很高,机械构件很难满足该使用条件要求。此外,中国专利,授权公告号为cn209541987u的专利提出了压电式压力传感器的标定装置,该公开的专利通过将施压部件固定在预设位置,将底座设置在施压部件的正下方,底座上方安装标准压力传感器,待标定压电式压力传感器设置在标准压力传感器上方,进行标定时释放施压部件,施压部件自由下落直接撞击待标定压力传感器。但该专利中待标定的压力传感器是有一定体积的刚性传感器,因此该发明忽略了在标定薄膜压力传感器时对轻薄的柔性传感器的固定,且该装置忽略了因锤头平面度不足带来的误差,同时,受限于该装置施压部件的结构,无法进行较小冲击载荷下的实验。因此需要设计一种针对薄膜传感器的标定方法。
技术实现思路
1、本发明提供一种在充分了解薄膜传感器的结构及性能的基础上,针对现在薄膜传感器标定方法的不足,提出一种针对微米、亚微米级厚度的薄膜类压力传感器的标定方法及标定装置,可以用小体积装置完成标定工作,可以实现定量化控制冲击载荷大小,可以快速、高效、准确的完成标定。
2、为解决上述技术问题,本发明采用如下技术方案:
3、一种薄膜传感器动态力学标定方法,包括以下步骤:
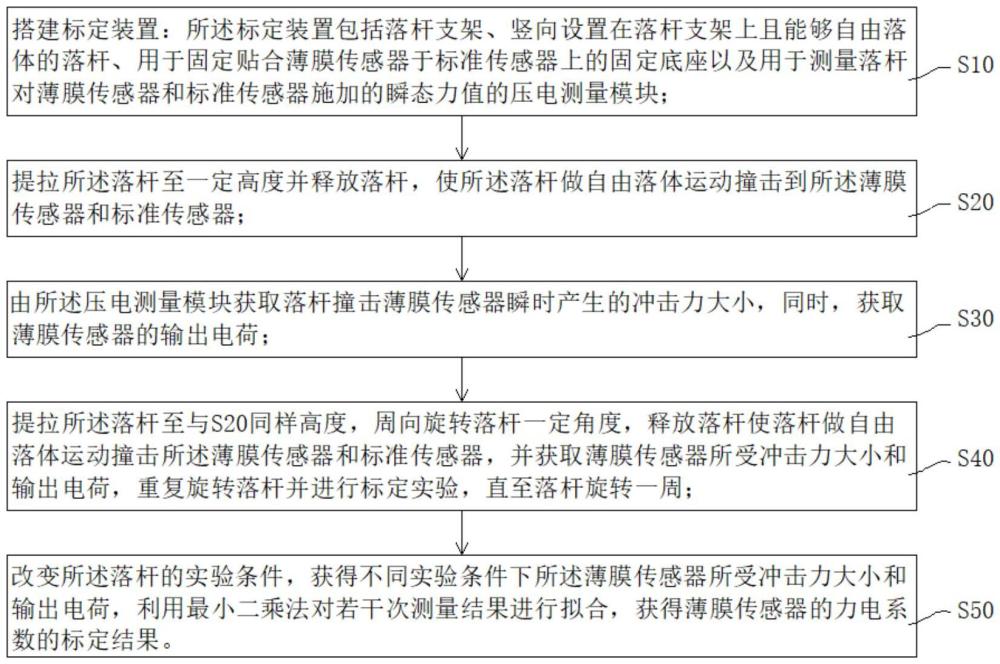
4、s10、搭建标定装置:所述标定装置包括落杆支架、竖向设置在落杆支架上且能够自由落体的落杆、用于固定贴合薄膜传感器于标准传感器上的固定底座以及用于测量落杆对薄膜传感器和标准传感器施加的瞬态力值的压电测量模块;
5、s20、提拉所述落杆至一定高度并释放落杆,使所述落杆做自由落体运动撞击到所述薄膜传感器和标准传感器;
6、s30、由所述压电测量模块获取落杆撞击薄膜传感器瞬时产生的冲击力大小,同时,获取薄膜传感器的输出电荷;
7、s40、提拉所述落杆至与s20同样高度,周向旋转落杆一定角度,释放落杆使落杆做自由落体运动撞击所述薄膜传感器和标准传感器,并获取薄膜传感器所受冲击力大小和输出电荷,重复旋转落杆并进行标定实验,直至落杆旋转一周;
8、s50、改变所述落杆的实验条件,获得不同实验条件下所述薄膜传感器所受冲击力大小和输出电荷,利用最小二乘法对若干次测量结果进行拟合,获得薄膜传感器的力电系数的标定结果。
9、优选的,所述s10中标定装置还包括用于提拉落杆竖向移动的机械手,所述机械手的自由端设有能够夹持落杆并带动落杆沿自身轴向旋转的夹具。
10、优选的,所述s20包括通过机械手提拉所述落杆的步骤;所述s40包括通过夹具周向旋转所述落杆的步骤。
11、优选的,所述s50的实验条件包括落杆的提拉高度、直径、长度以及材质;所述s50中获得薄膜传感器的力电系数的标定结果,过程如下:
12、所述薄膜传感器的输出电荷q表示为:
13、q=kfz(1)
14、其中,k为所述薄膜传感器6的力电转换系数,fz为所述落杆自由下落产生的冲击力大小;
15、则根据公式(1),力电转换系数k为:
16、
17、改变所述落杆的实验条件进行重复标定实验,获得不同实验条件下的若干组(fz,q)值;以fz为横坐标,q为纵坐标,将若干组(fz,q)值绘于fz-q坐标系上,用最小二乘法对若干组(fz,q)值进行拟合,拟合直线的形式为q=kfz+b,得到最终的标定结果。
18、优选的,所述压电测量模块包括与标准传感器信号连接的第一电荷放大器、与薄膜传感器信号连接的第二电荷放大器以及与第一电荷放大器和第二电荷放大器信号连接的数据采集单元。
19、一种薄膜传感器动态力学标定装置,根据前述的薄膜传感器动态力学标定方法进行薄膜传感器动态力学标定,所述标定装置包括落杆支架、竖向设置在落杆支架上且能够自由落体的落杆、用于固定贴合薄膜传感器于标准传感器上的固定底座以及用于测量落杆对薄膜传感器和标准传感器施加的瞬态力值的压电测量模块;所述标定装置还包括用于承载落杆支架、固定底座以及标准传感器的装置底板;所述标定装置还包括用于承载落杆支架、固定底座以及标准传感器的刚性底座。
20、优选的,所述落杆支架包括通过光轴底座对称设置的支撑光轴、对称安装于支撑光轴的锁紧箱式直线轴承、固设于锁紧箱式直线轴承之间的梁板以及设置于梁板上用于安装落杆的箱式直线轴承。
21、优选的,所述固定底座包括底座基板、对称固设在底座基板两侧的垫块、固设在垫块顶部的垫板、固设在垫板顶部的下夹具以及固设在下夹具顶部的上夹具;所述上夹具底部设有外凸部,所述下夹具顶部设有与外凸部匹配的内凹部,且所述上夹具和下夹具之间设有弹簧。
22、优选的,所述标定装置还包括型材架、固设在型材架上的丝杠架、转动设置在丝杠架内部的丝杠、与丝杠螺纹连接且能够沿丝杠轴向位移的滑座、设置在滑座上的法兰夹具以及通过电机连接法兰与丝杠架相连的电机,所述丝杠的轴通过联轴器与电机输出端相连,所述机械手固设在法兰夹具上。
23、优选的,所述机械手包括设置在法兰夹具上的旋转气缸、设置在旋转气缸自由端的夹紧气缸以及对称设置在夹紧气缸输出端且能够相对移动的夹具,所述夹具内侧设有用于夹持落杆的梯形内凹槽。
24、由以上技术方案可知,本发明具有如下有益效果:
25、1.本发明中,落杆的实验条件可以根据需求进行更换。针对落杆压力无法精确测量的需求,本发明将薄膜传感器贴敷在高精度标准传感器的正上方,紧密贴合,落杆下落时冲击薄膜传感器和标准传感器的中心位置,以标准传感器的压力标定薄膜传感器所受压力。
26、2.本发明中,标准传感器提到的线性问题,在薄膜传感器中不适用。本发明创新性的提出薄膜传感器的非线性标定方法,以幂函数、二次函数、三次函数等非线性函数来标定薄膜传感器的力-电响应情况,得到凸型标定曲线,或者凹型标定曲线。为了尽可能的提高标定精度,本发明建议尽可能的多测量点,提供更多的标定数据。
27、3.本发明中,针对标定带来的测量点多、人工测量费时的问题,本发明提出以机械手代替人工进行标定,机械手可以自动化拾取落杆,并精确控制落杆的高度。
28、4.本发明中,薄膜传感器的厚度很薄,落杆与接触面的平面度对标定结果影响很大,所以对落杆冲击端面的平面度要求很高,本发明创新性的提出了旋转测量法,在360°范围内旋转n次,并取平均值,抵消落杆冲击端面平面度不足带来的误差。
29、5.本发明中,可以将被标定薄膜传感器与标准传感器通过线缆连接到上位机测量采集软件,自动进行数据记录,从而针对每一个传感器得到相应的标定曲线。
- 还没有人留言评论。精彩留言会获得点赞!