路径规划的方法、装置及存储介质与流程
本技术涉及路径规划,具体地涉及一种路径规划的方法、装置及存储介质。
背景技术:
1、路径规划在很多领域都具有广泛的应用。在高新科技领域的应用有:机器人的自主无碰行动、无人机的避障突防飞行、巡航导弹躲避雷达搜索、防反弹袭击、完成突防爆破任务等。在日常生活领域的应用有:gps导航、基于gis系统的道路规划、城市道路网规划导航等。在对某一区域进行路径规划分析时,通常会将该区域的全部道路的地理信息输入到算法中进行计算,但是这些数据量过于庞大,导致路径规划的效率极低。
技术实现思路
1、本技术实施例的目的是提供一种路径规划的方法、装置及存储介质,用以解决现有技术中地理信息数据量庞大,导致路径规划的效率低的技术问题。
2、为了实现上述目的,本技术第一方面提供一种路径规划的方法,方法包括:
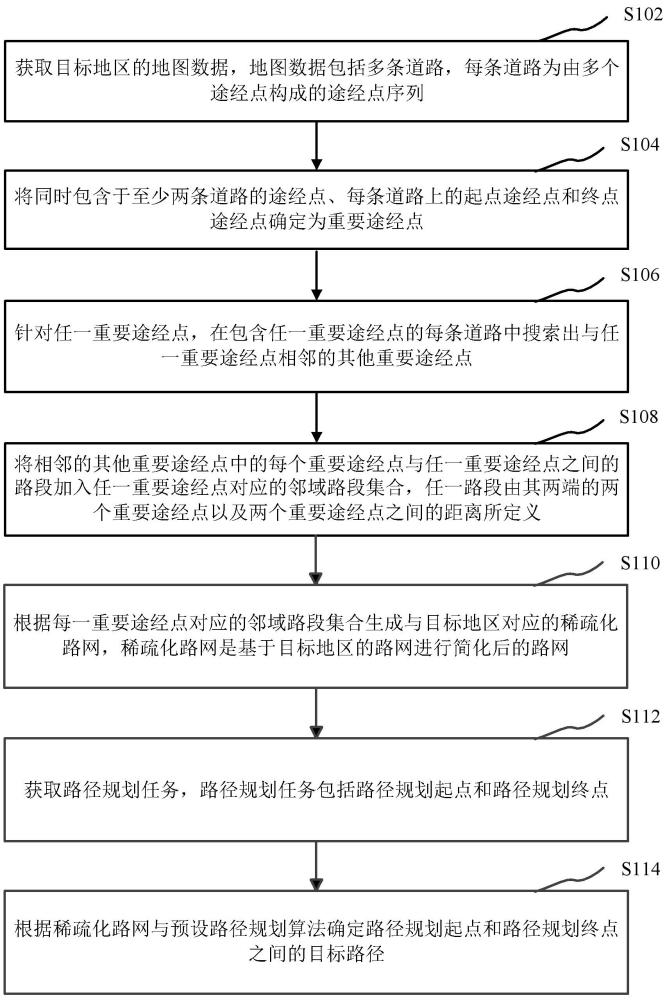
3、获取目标地区的地图数据,地图数据包括多条道路,每条道路为由多个途经点构成的途经点序列;
4、将同时包含于至少两条道路的途经点、每条道路上的起点途经点和终点途经点确定为重要途经点;
5、针对任一重要途经点,在包含任一重要途经点的每条道路中搜索出与任一重要途经点相邻的其他重要途经点;
6、将相邻的其他重要途经点中的每个重要途经点与任一重要途经点之间的路段加入任一重要途经点对应的邻域路段集合,任一路段由其两端的两个重要途经点以及两个重要途经点之间的距离所定义;
7、根据每一重要途经点对应的邻域路段集合生成与目标地区对应的稀疏化路网,稀疏化路网是基于目标地区的路网进行简化后的路网;
8、获取路径规划任务,路径规划任务包括路径规划起点和路径规划终点;
9、根据稀疏化路网与预设路径规划算法确定路径规划起点和路径规划终点之间的目标路径。
10、在本技术的实施例中,方法还包括:将除重要途经点以外的途经点确定为非重要途经点;获取每一路段对应的非重要途经点集合,其中,任一路段对应的非重要途经点集合为由该任一路段两端的重要途经点之间的非重要途经点构成的途经点序列。
11、在本技术的实施例中,获取每一路段对应的非重要途经点集合包括:确定每个途经点所在的当前道路;针对每个途经点,在途经点为非重要途经点的情况下,在当前道路中搜索最接近途经点的两个重要途经点;针对每个途经点,将途经点加入至最接近途经点的两个重要途经点之间的路段对应的非重要途经点集合,以获取每一路段对应的非重要途经点集合。
12、在本技术的实施例中,在包含任一重要途经点的每条道路中搜索出与任一重要途经点相邻的其他重要途经点包括:针对每一道路包括的途经点序列,按照该途经点序列的顺序逐一遍历该途经点序列中重要途经点;在遍历到任一重要途经点的情况下,按照该途经点序列的顺序逐一搜索每个途经点以将第一个搜索到的重要途经点确定为与任一重要途经点相邻的其他重要途经点,并将搜索到的不为重要途经点的途经点确定为非重要途经点;获取每一路段对应的非重要途经点集合,包括:根据任一重要途经点与任一重要途经点相邻的其他重要途经点之间的非重要途经点,生成任一重要途经点与任一重要途经点相邻的其他重要途经点之间路段对应的非重要途经点集合。
13、在本技术的实施例中,方法还包括:获取目标路径包括的每一路段对应的非重要途经点集合;将目标路径包括的每一路段对应的非重要途经点集合作为序列插入至目标路径包括的每一路段中以生成路径规划起点和路径规划终点之间的详细目标路径。
14、在本技术的实施例中,将同时包含于至少两条道路的途经点、每条道路上的起点途经点和终点途经点确定为重要途经点包括:获取每个途经点的经纬度坐标;基于经纬度坐标遍历每条道路的每个途经点;针对每个途经点,在途经点的遍历次数大于或等于预设阈值的情况下,确定途经点为重要途经点。
15、在本技术的实施例中,方法还包括:针对每个途经点,在途经点的遍历次数小于预设阈值的情况下,且途经点不为起点途经点或终点途经点的情况下,确定途经点确为非重要途经点。
16、在本技术的实施例中,在包含任一重要途经点的每条道路中搜索出与任一重要途经点相邻的其他重要途经点包括:针对任一重要途经点,在包含任一重要途经点的每条道路包括的途经点序列中,根据任一重要途经点的序号朝任一重要途经点的前后逐一搜索每个途经点,将前后逐一搜索过程中分别首次搜索到重要途经点确定为与任一重要途经点相邻的其他重要途经点。
17、在本技术的实施例中,方法应用于包括不同层级路网的多层级路网场景,其中,每一层级路网对应一个稀疏化路网,不同层级路网的最高层级不小于二级,任一n级路网中的每个途经点属于n级途经点且存在至少一个途经点属于n+1级途经点,任一n级途经点处于至少一个n级路网中,不同路网中的路段互不重合,同一路网中的途经点在该同一路网中具有连通性,n为任意正整数且小于最高层级;路径规划起点和路径规划终点不处于同一个一级路网中,根据稀疏化路网与预设路径规划算法确定路径规划起点和路径规划终点之间的目标路径包括:根据稀疏化路网与预设路径规划算法生成分别与路径规划起点对应的初始始段临时路径,以及与路径规划终点对应的初始末段临时路径;将初始始段临时路径加入一级的始段临时路径集合,将初始末段临时路径加入一级的末段临时路径集合,并将当前层级更新为一级;在当前层级发生更新且不超过最高层级的情况下,确定当前层级的始段临时路径集合中的每一始段临时路径与当前层级的末段临时路径集合中的每一末段临时路径之间的连通性;在任一始段临时路径与任一末段临时路径之间具有当前层级的连通性的情况下,针对该任一始段临时路径与该任一末段临时路径执行当前层级对应的路径拼接操作,并将生成的备选路径加入备选路径集合;在任一始段临时路径与任一末段临时路径之间不具有当前层级的连通性的情况下,针对该任一始段临时路径与该任一末段临时路径执行当前层级对应的路径延伸操作,并将生成的始段临时路径加入当前层级上一层级的始段临时路径集合,将生成的末段临时路径加入当前层级上一层级的末段临时路径集合;在针对每一始段临时路径与每一末段临时路径均已执行路径拼接操作或路径延伸操作的情况下,将当前层级更新为对应的上一层级;在当前层级超过最高层级的情况下,将备选路径集合中路径长度最短的备选路径确定为路径规划起点和路径规划终点之间的目标路径。
18、在本技术的实施例中,根据稀疏化路网与预设路径规划算法确定路径规划起点和路径规划终点之间的目标路径包括:在路径规划起点与路径规划终点中的至少一个节点属于非重要途经点的情况下,基于路径规划起点、路径规划终点、稀疏化路网与每个路段对应的非重要途经点集合,确定路径规划起点对应的始中转途经点与路径规划终点对应的末中转途经点;根据稀疏化路网与预设路径规划算法确定任一始中转途经点和任一末中转途经点之间的中转路径及其路径长度;确定每一中转路径对应的前置路径与后置路径,其中,任一中转路径对应的前置路径为路径规划起点与该任一中转路径两端点中的始中转途经点之间的路径,任一中转路径对应的后置路径为该任一中转路径两端点中的末中转途经点与路径规划终点之间的路径;基于每一中转路径确定对应的候选路径及其路径长度,其中,任一中转路径对应的候选路径由该任一中转路径以及该任一中转路径对应的前置路径与后置路径拼接得到,任一中转路径对应的候选路径的路径长度为该任一中转路径以及该任一中转路径对应的前置路径与后置路径的长度之和;将路径长度最短的候选路径确定为路径规划起点和路径规划终点之间的目标路径。
19、本技术第二方面提供一种路径规划的装置,其特征在于,包括:
20、存储器,被配置成存储指令;以及处理器,被配置成从所述存储器调用所述指令以及在执行所述指令时能够实现根据上述的路径规划的方法。
21、本技术第三方面提供一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据上述的路径规划的方法。
22、通过上述技术方案,筛选出目标地区的地图数据中的重要途经点,以及搜索出每一重要途经点临近的其他重要途经点,生成与每一重要途经点对应的邻域路段集合,邻域路段集合通过邻接表的数据格式进行存储,生成目标地区的稀疏化路网图,使得地图数据的数据量大幅度降低,节省存储空间。在稀疏化路网中执行路径规划任务,可以快速得出路径规划起点和路径规划终点之间的目标路径,提高运算效率。
23、本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!