机房温度监测方法、装置、系统、电子设备及存储介质与流程
本技术涉及通信机房智能控制,具体而言,涉及一种机房温度监测方法、装置、系统、电子设备及存储介质。
背景技术:
1、在数字化高速发展的时代,通信机房已经成为企业运营的关键场所,承担着数据处理、存储和传输的重要任务。为了确保通信机房的稳定运行,制定一套科学、高效的机房智能巡检控制逻辑至关重要。
2、然而,通信行业智能巡检机器人产品类型较少而且价格昂贵,不利于大范围使用,相关技术中大多采用人工巡检的方式进行机房维护,费时费力,无法及时高效地发现机房中潜在的安全隐患、设备故障和环境异常等情况。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本技术实施例提供了一种机房温度监测方法、装置、系统、电子设备及存储介质,以至少解决由于通信行业智能巡检机器人产品类型较少而且价格昂贵,相关技术中大多采用人工巡检的方式进行机房维护,造成的机房巡检费时费力的技术问题。
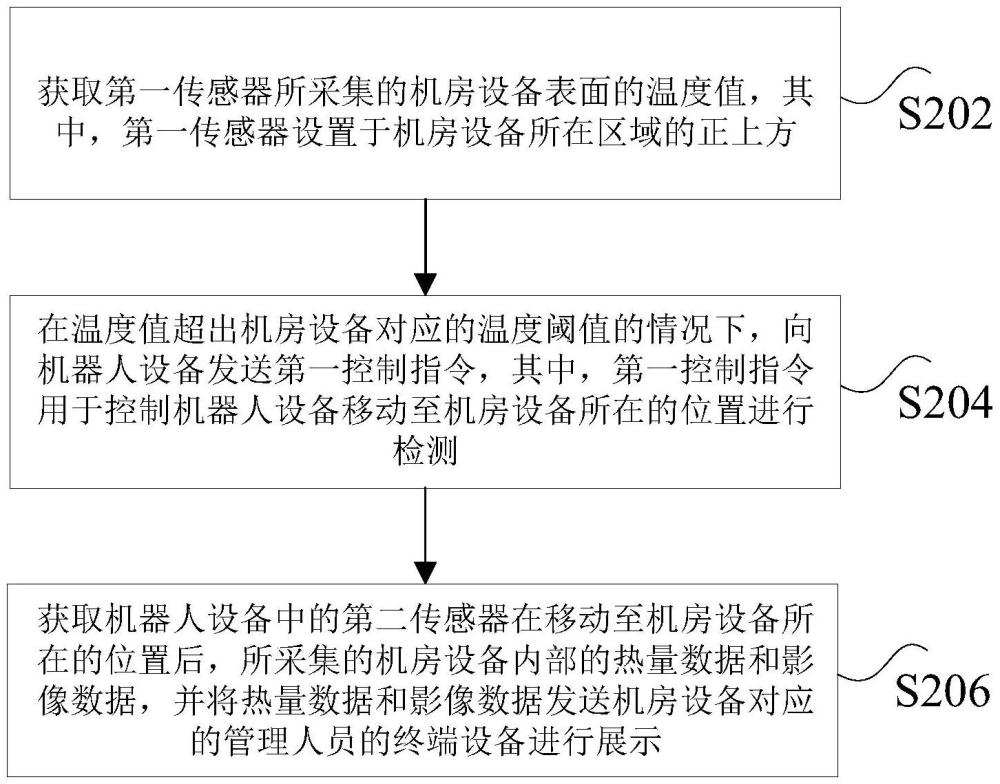
2、根据本技术实施例的一个方面,提供了一种机房温度监测方法,包括:获取第一传感器所采集的机房设备表面的温度值,其中,第一传感器设置于机房设备所在区域的正上方;在温度值超出机房设备对应的温度阈值的情况下,向机器人设备发送第一控制指令,其中,第一控制指令用于控制机器人设备移动至机房设备所在的位置进行检测;获取机器人设备中的第二传感器在移动至机房设备所在的位置后,所采集的机房设备内部的热量数据和影像数据,并将热量数据和影像数据发送机房设备对应的管理人员的终端设备进行展示。
3、可选地,机器人设备中包括:激光雷达和超宽带定位模块;控制机器人设备移动至机房设备所在的位置进行检测包括:确定机房设备在机房中的第一位置,以及机器人设备的第二位置;获取机器人设备对应的历史移动轨迹数据,其中,历史移动轨迹数据中包含机器人设备在机房中的多次历史移动的轨迹;确定历史移动轨迹数据中包含第一位置和第二位置,且第一位置和第二位置之间的移动轨迹无重复路径段的历史移动轨迹,并将历史移动轨迹中第一位置和第二位置之间的移动时间最短的移动路径,确定为目标移动路径;控制机器人设备按照目标移动路径,从第一位置移动至第二位置,并在机器人设备的移动过程中,获取激光雷达接收到的反射信号,并依据反射信号判断机器人设备在目标移动路径的前进方向上是否存在障碍物;在判定前进方向上存在障碍物的情况下,依据机房的地图数据、以及障碍物与机器人设备的当前距离,调整目标移动路径,其中,调整后的目标移动路径能够避开障碍物。
4、可选地,机器人设备中还包括:全向移动平台、垂直升降云台、伸缩机械臂,其中,全向移动平台中包含多个麦克纳姆轮,用于驱动机器人设备进行移动和姿态调整;垂直升降云台固定于全向移动平台上,用于在直流无刷电机的驱动下,进行垂直方向的上下移动;伸缩机械臂固定于垂直升降云台上,能够随着垂直升降云台的上下移动而上下移动,用于通过伸缩移动来控制固定于伸缩机械臂末端的第二传感器进行移动,其中,第二传感器包括:红外热像仪、可见光相机。
5、可选地,机器人设备中还包括:电池模块;在机器人设备的移动过程中,方法还包括:获取机器人设备的负载输出电压;依据电池模块对应的放电特征曲线和负载输出电压,确定机器人设备的剩余电量,其中,放电特征曲线用于表征电池模块的剩余电量与负载输出电压之间的关联关系;依据机器人设备的当前位置和目标移动路径,确定机器人设备移动至第一位置所需的电量值;在剩余电量不大于电量值的情况下,发送电量不足告警信息。
6、可选地,方法还包括:响应于手动控制指令,控制机器人设备按照前端交互界面中设置的移动路径进行移动,并将机器人设备中相机在移动过程中所采集的影像数据返回至前端交互界面中进行展示。
7、可选地,第一传感器包括:温度传感器;方法还包括:确定机房设备的标识符、以及标识符对应的温度阈值;在第一传感器所采集的机房设备的温度值超出温度阈值的情况下,获取机房设备的设备信息,并向机房设备对应的管理人员的终端设备发送超温告警信息,其中,设备信息包括以下至少之一:机房设备的类型、机房设备在机房中的位置。
8、可选地,方法还包括:响应于第一阈值调整指令,调整机房设备对应的温度阈值,其中,第一阈值调整指令能够通过管理人员的终端设备或机房中的监测设备进行设置;或者,获取机房对应的季节信息和气候信息,并确定机房设备在季节信息和气候信息的条件下所对应的温度阈值进行设置。
9、根据本技术实施例的另一个方面,还提供了一种机房温度监测装置,包括:第一监测模块,用于获取第一传感器所采集的机房设备表面的温度值,其中,第一传感器设置于机房设备所在区域的正上方;移动控制模块,用于在温度值超出机房设备对应的温度阈值的情况下,向机器人设备发送第一控制指令,其中,第一控制指令用于控制机器人设备移动至机房设备所在的位置进行检测;第二监测模块,用于获取机器人设备中的第二传感器在移动至机房设备所在的位置后,所采集的机房设备内部的热量数据和影像数据,并将热量数据和影像数据发送机房设备对应的管理人员的终端设备进行展示。
10、根据本技术实施例的另一个方面,还提供了一种机房温度监测系统,包括:第一传感器、机器人设备和控制器,其中,第一传感器设置于机房设备所在区域的正上方,用于采集机房设备对应的温度值;控制器,用于获取第一传感器所采集的机房设备表面的温度值;在温度值超出机房设备对应的温度阈值的情况下,向机器人设备发送第一控制指令;获取机器人设备中的第二传感器在移动至机房设备所在的位置后,所采集的机房设备内部的热量数据和影像数据,并将热量数据和影像数据发送机房设备对应的管理人员的终端设备进行展示;机器人设备,用于响应于第一控制指令,移动至机房设备所在的位置进行检测。
11、根据本技术实施例的又一方面,还提供了一种电子设备,包括:存储器和处理器,处理器用于运行存储在存储器中的程序,其中,程序运行时执行机房温度监测方法。
12、根据本技术实施例的再一方面,还提供了一种非易失性存储介质,非易失性存储介质包括存储的计算机程序,其中,非易失性存储介质所在设备通过运行计算机程序执行机房温度监测方法。
13、根据本技术实施例的再一方面,还提供了一种计算机程序产品,包括计算机程序,计算机程序被处理器执行时实现机房温度监测方法的步骤。
14、在本技术实施例中,采用获取第一传感器所采集的机房设备表面的温度值,其中,第一传感器设置于机房设备所在区域的正上方;在温度值超出机房设备对应的温度阈值的情况下,向机器人设备发送第一控制指令,其中,第一控制指令用于控制机器人设备移动至机房设备所在的位置进行检测;获取机器人设备中的第二传感器在移动至机房设备所在的位置后,所采集的机房设备内部的热量数据和影像数据,并将热量数据和影像数据发送机房设备对应的管理人员的终端设备进行展示的方式,通过传感器设备与机器人设备联合使用,达到了通信机房自主巡检和降低人员巡检维护次数的目的,进而解决了由于通信行业智能巡检机器人产品类型较少而且价格昂贵,相关技术中大多采用人工巡检的方式进行机房维护,造成的机房巡检费时费力技术问题。
- 还没有人留言评论。精彩留言会获得点赞!