基于超短基线十阵元声基阵及其定位方法与流程
本发明涉及海底定位,具体涉及一种基于超短基线十阵元声基阵及其定位方法。
背景技术:
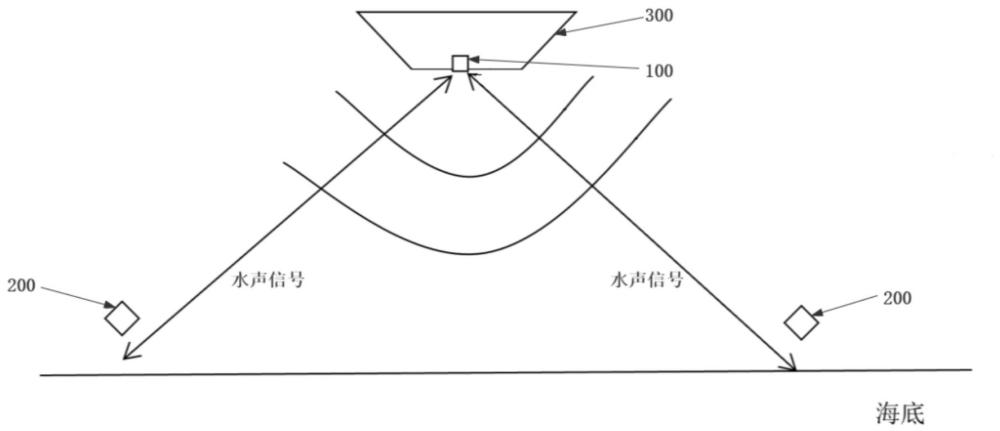
1、超短基线水声定位系统,亦称超短基线,是一种高度专业化的水下定位解决方案,其核心在于利用多个精密阵元构成的阵列,通过精确分析各阵元接收到的水声信号间的相位差异,来精确计算出水下应答器的空间位置(包括方位与距离)。该系统专为小型化设计,基阵尺寸介于几厘米至几十厘米之间,灵活部署于测量船的底部或小型水面船只的侧舷,以适应多样化的水下探测需求。如图1所示,超短基线声基阵100被稳固安装于测量船300的船底,它主动向海底发射特定频率的水声信号,而部署在水下的应答器则负责接收这些信号并作出相应回应。通过精确测量水声信号的往返时间,以及各阵元间接收信号相位差的精细分析,系统能够高效且准确地解算出应答器300的三维位置信息。为解决上述技术瓶颈,行业内的研究人员正致力于创新方法的研发,力求在保持系统小型化优势的同时,有效提升定位精度并减少误差。例如,中国专利cn114167378a所提出的天线阵列解角度模糊方法,通过子阵布局与相位分析算法,有效解决相位差测量中的模糊问题,为超短基线声基阵的性能优化提供新的思路。虽然当前技术虽已取得显著进展,但是依然存在定位精度提升与误差控制的问题;(1)增大基阵尺寸虽能直观提升定位精度,却因阵元间距超出声波波长的一半而引入相位差测量模糊的问题,导致定位结果的不确定性增加;(2)当被测目标接近基阵平面时,尤其是俯仰角趋于零度时,定位误差会显著放大,进一步限制系统的适用范围。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种基于超短基线十阵元声基阵及其定位方法。
2、本发明采用的技术方案如下:
3、一种基于超短基线十阵元声基阵,包括:
4、沿轴排列的第一阵列;
5、沿轴排列的第二阵列;
6、其中,第一阵列和第二阵列相互垂直排布形成水平十字阵,水平十字阵上设置有由超短基线声基阵组成的阵元;
7、水平十字阵的各个阵元采用不等间距排列,用于减少冗余阵元的数量;
8、间距窄的两个阵元间距小于等于/2,用于获得精确的相位差;
9、对间距宽的两个阵元相位差进行修正,用于有效提高定位精度。
10、本技术方案改进超短基线十阵元声基阵的结构,通过优化阵元布局、精确测量相位差并进行必要的修正,实现高精度的声源定位,在海洋探测、水下导航、水下目标跟踪等领域具有广泛的应用前景。具体地,超短基线(usbl,ultra-short baseline)声基阵是一种利用声波传播时间差或相位差来定位水下物体的技术,与传统的长基线或短基线系统相比,超短基线系统对基阵尺寸要求窄。通过测量不同阵元接收到同一声源信号时的相位差,计算出声源相对于基阵的位置,相位差定位方法依赖于精确的相位测量和阵元间的几何关系;水平十字阵中,第一阵列沿轴排列,第二阵列沿轴排列,两者垂直相交形成水平十字阵,通过同时提供水平和垂直方向上的定位信息,增强二维平面内的定位能力;为减少冗余阵元数量并优化性能,阵元采用不等间距排列,在保持定位精度的同时,减少系统复杂性和成本,不等间距还能在一定程度上抑制旁瓣效应,提高方向估计的分辨率;对于间距窄的两个阵元(间距小于等于/2,为声波波长),其相位差测量更为精确,因为此时相位差的变化对距离变化更为敏感,用于在近距离范围内实现高精度的定位;对于间距宽的阵元,由于声波传播路径较长,受到多径效应、环境噪声等因素的影响,导致相位差测量不准确,因此,需要对这些阵元的相位差进行修正,以补偿这些因素引起的误差,从而提高整体定位精度。
11、另外,根据本发明上述提出基于超短基线十阵元声基阵还具有如下附加技术特征:
12、根据本发明的一个实施例,所述水平十字阵的各个阵元安装于测量船的船底,并向海底发射水声信号;位于水下的应答器用于接收发射的水声信号并进行应答,超短基线声基阵根据水声信号的往返时间、以及各个阵元接收到的水声信号之间的相位差即可对应答器的位置进行解算。
13、本技术方案通过向海底发射水声信号并接收应答器的回应信号,利用信号传播时间和相位差信息进行水下目标的精确定位。具体地,水平十字阵的各个阵元安装于测量船的船底,作为声源向海底发射水声信号,为脉冲信号或连续波信号;位于水下的应答器接收到来自测量船的水声信号后,会进行应答,应答器通常包含一个水下应答器和一个发射器,能够检测到水声信号并触发一个回应信号,回应信号包含应答器的唯一标识或其他编码信息;超短基线声基阵记录水声信号从发射到接收到应答器回应信号的往返时间,这个时间差是计算应答器与测量船之间距离的关键参数;各个阵元还会测量接收到的水声信号(包括原始发射信号和应答器回应信号)之间的相位差,由于声波在传播过程中会受到海洋环境的影响,不同阵元接收到的信号会有不同的相位延迟,相位差提供应答器相对于测量船水平十字阵位置的额外信息;利用往返时间计算出的距离信息和各个阵元接收到的相位差信息,结合水平十字阵的几何布局,构建一个多维度的数学模型来解算应答器的三维位置;通过优化阵元布局,尽提高定位的准确性。
14、根据本发明的一个实施例,所述水平十字阵的各个阵元的间距与对应答器的定位精度呈反比的关系,阵元的间距超过时,阵元间最大相位误差将会落在区间之外,造成相位差测量模糊,致使位置解算错误。
15、本技术方案中,当阵元间距增加到一定程度时,由于相位差是周期性的(范围在到之间),不同位置的应答器会产生相同的相位差,这种现象称为相位模糊;一旦阵元间最大相位误差落在某个特定区间之外(这个区间通常是相位差测量范围的一半,即),系统就无法准确区分这些模糊的位置,从而导致位置解算错误;阵元间距直接影响到相位差测量的分辨率;间距越小,不同路径到达的声波在阵元之间产生的相位差变化越精细,从而能够更准确地反映应答器的位置。
16、根据本发明的一个实施例,所述水平十字阵的各个阵元都处于同一平面时,应答器的俯仰角越靠近基阵平面时,定位误差越大。
17、本技术方案中,当水平十字阵的各个阵元都处于同一平面时,应答器的俯仰角越靠近基阵平面,定位误差增大的原因主要包括几何约束导致的信号传播特性变化、相位差测量的局限性、多路径效应的干扰以及深度信息的缺失。
18、根据本发明的一个实施例,本基于超短基线十阵元声基阵还包括:
19、沿轴排列的第三阵列;
20、第三阵列的阵元间距小于等于;
21、通过垂直于水平十字阵设置的第三阵列,根据水下应答器的俯仰角情况确定其轴坐标值的不同取值情况,用于解决俯仰角贴近水平面时产生的定位误差低的问题。
22、本技术方案通过引入沿轴排列的第三阵列,有效解决在俯仰角贴近水平面时产生的定位误差低的问题,实现对水下目标的三维精确定位。具体地,水平十字阵由两组正交的线性阵列组成,每组阵列通常包含若干阵元,用于分别测量目标在轴和轴方向上的位置;第三阵列沿轴排列,用于增加在垂直方向上的定位能力,解决水平面附近(即俯仰角接近0度)定位误差增大问题;当水下应答器的俯仰角贴近水平面时,因为信号在垂直方向上的变化窄而导致大的定位误差,通过引入第三阵列,系统能够更直接地测量或估计目标在轴上的位置;垂直于水平十字阵设置的第三阵列,其接收到的信号特性会随着应答器俯仰角的变化而变化;将结合来自所有阵列(包括水平十字阵和轴阵列)的数据,以计算出目标的三维坐标。
23、根据本发明的一个实施例,所述水平十字阵的各个阵元的排序规则如下:
24、沿轴排列有1#阵元、2#阵元、3#阵元、4#阵元,其中,1#阵元与2#阵元、3#阵元与4#阵元属于间距窄类型;而2#阵元与3#阵元属于间距宽类型;
25、沿轴排列有5#阵元、6#阵元、7#阵元、8#阵元,其中,5#阵元与6#阵元、7#阵元与8#阵元属于间距窄类型;而6#阵元与7#阵元属于间距宽类型;
26、沿水平十字阵中心排列有9#阵元、10#阵元,其中,10#阵元沿轴排列,9#阵元与10#阵元属于间距窄类型。
27、本技术方案通过优化阵元的布局和间距来提高水下定位系统的性能,通过结合非均匀间距、三维定位能力,该系统能够实现对水下目标的高精度、高分辨率的三维定位。具体地,阵列的布局采用非均匀间距设计,即在轴和轴上,相邻阵元之间的间距分为“窄”和“宽”两种类型;窄的间距能够捕获更细微的信号变化,从而增加对目标位置变化的敏感度;而宽的间距则有助于在更广泛的区域内进行搜索和定位;通过将阵元以非均匀间距排列,减少由于阵元间相互干扰而导致的信号失真;在水平十字阵的中心,特别安排9#和10#阵元,其中10#阵元沿轴排列,通过结合水平十字阵在平面上的定位信息以及10#阵元在轴方向上的信息,实现对水下目标的三维精确定位。
28、为实现上述目的,本发明还提供一种基于超短基线十阵元声基阵的定位方法。
29、一种基于超短基线十阵元声基阵的定位方法,包括以下步骤:
30、第一步:基于水平十字阵发射水声信号的时间以及接收水下应答器的应答信号的时间确定水平十字阵中心与水下应答器的距离为;
31、第二步:基于1#阵元、4#阵元接收的应答信号确定1#阵元与4#阵元的实测相位差,基于5#阵元、8#阵元接收的应答信号确定5#阵元与8#阵元的实测相位差;
32、第三步:基于1#阵元、2#阵元接收的应答信号确定1#阵元与2#阵元的实测相位差,基于5#阵元、6#阵元接收的应答信号确定5#阵元与6#阵元的实测相位差;
33、第四步:通过对进行修正,得到1#阵元与4#阵元的修正相位差,通过对进行修正,得到5#阵元与8#阵元的修正相位差;
34、第五步:基于、、确定、,其中、分别为水下应答器的x轴坐标值和y轴坐标值;
35、第六步:根据水下应答器俯仰角情况确定,其中为水下应答器的轴坐标值。
36、本技术方案通过精确测量和修正声信号的传播时间和相位差,结合几何定位算法和俯仰角,实现对水下应答器的高精度三维定位。具体地,第一步利用声波在水中的传播速度(已知)和信号往返时间(发射到接收)来计算距离,通过测量时间差(time of flight,tof)和已知的声速,计算出目标与声基阵之间的距离;第二步利用不同阵元接收到的信号之间的相位差来估计目标在水平方向(轴和轴)上的位置,相位差与声波到达不同阵元的路径差成正比,而路径差则与目标的位置有关,通过测量1#与4#、5#与8#阵元之间的相位差,初步估计目标在水平面上的位置;第三步细化水平方向上的相位差测量,通过增加测量点(即阵元对),提高定位精度,1#与2#、5#与6#阵元之间的相位差测量为系统提供更多的信息,有助于更准确地估计目标位置;第四步通过对相位差进行修正,以提高定位精度,修正过程涉及到信号处理技术,如滤波、去噪、相位解缠等;第五步利用几何定位算法(如最小二乘法、最大似然估计等)计算出水下应答器的轴和轴坐标值;第六步依赖于额外的信息或假设来确定水下应答器的轴坐标值(即深度),如利用已知的水下地形信息、结合其他传感器数据(如压力传感器)、或者根据应答器的俯仰角信息和水平位置进行推算。俯仰角信息通过分析声信号的入射角或利用额外的姿态传感器获得。
37、根据本发明的一个实施例,所述第四步中,由下式确定:
38、
39、其中:为整数且的取值满足使与的相位差范围在之间;
40、所述由下式确定:
41、
42、其中,为整数且的取值满足使与的相位差范围在之间。
43、根据本发明的一个实施例,所述第五步中,由下式确定:
44、
45、由下式确定:
46、。
47、根据本发明的一个实施例,所述第六步中,由下式确定:
48、
49、其中,为水中声速,为应答信号在9#阵元和10#阵元之间的时延差,为水下目标的俯仰角。
50、本发明与现有技术相比,具有以下有益效果:
51、(1)使用非等距排列的多个阵元构成声基阵,通过设置间距宽的阵元提高定位精度,并通过间距小于等于/2的阵元获得精确的相位差以对间距宽的阵元之间存在的相位模糊问题进行修正,从而在提高定位精度的同时解决相位模糊的问题;
52、(2)根据水下应答器的俯仰角情况确定,有效解决被测目标的俯仰角贴近水平面时产生的定位误差低的问题;
53、(3)采用收发合置形式,节省声基阵的占用空间;
54、(4)对阵元接收信号重复利用,避免其他冗余阵元。
- 还没有人留言评论。精彩留言会获得点赞!