一种粗精两级耦合跟瞄装置
本发明归属于目标跟瞄装置领域,确切而言,涉及一种粗精两级耦合跟瞄装置。
背景技术:
1、现有的跟瞄设备多数以二维转台作为基础架构,此设计在应对高速移动目标时,往往因响应速度迟缓且精度欠佳,面临着目标跟丢或跟踪不稳定的难题。相较而言,快反偏转镜具有响应速度极快以及精度极高的特性,能够迅速且精准地锁定目标,然而其可调节范围相对较窄,对其在广域扫描和长时间追踪方面的应用形成了限制。
2、经由合理的设计与技术整合,将二维转台和快反偏转镜予以有机融合,能够克服现存跟瞄系统的局限性,显著提升系统的整体性能与战斗效能。这种融合不但适用于军事应用,还能够在安防、工业以及科研等领域发挥关键作用,推动跟瞄技术的发展进步与应用拓展。本文旨在通过设计一种整体机械结构,充分彰显二者的优势,进而提高跟瞄系统的性能。
技术实现思路
1、本发明的目的在于提供一种粗精两级耦合跟瞄装置,以解决上述技术背景中提出的问题。该装置整体融合了二维跟踪转台与光束指向控制模块,能够实现高精度的目标跟瞄,适用范围广泛且便于安装。
2、为实现上述目的,本发明采用以下技术方案:
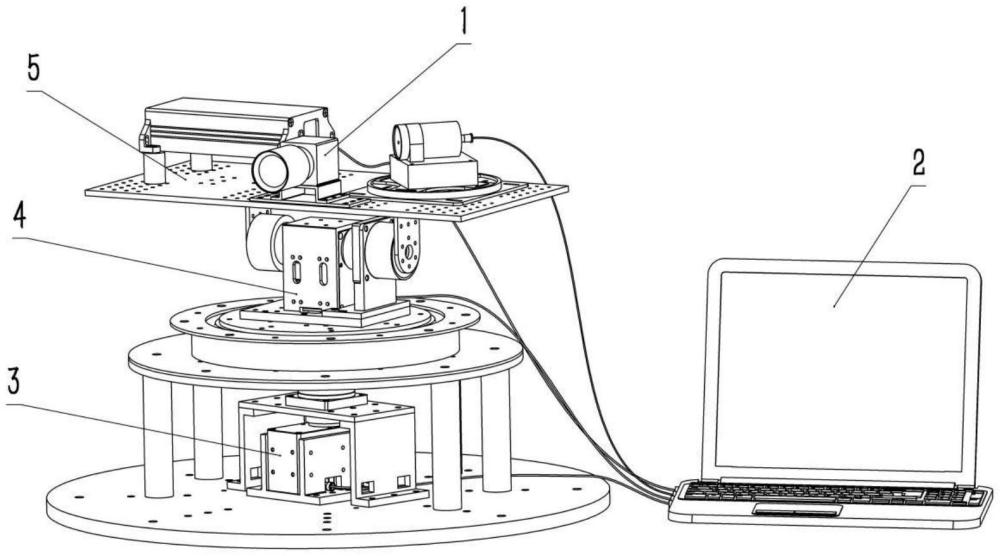
3、一种粗精两级耦合跟瞄装置,包括探测模块、指控模块、方位轴粗跟踪模块、俯仰轴粗跟踪模块及精跟瞄模块。
4、在上述一种粗精两级耦合跟瞄装置中,探测模块包括相机镜头、相机、相机支架。相机镜头安装在相机上,相机通过相机支架固定在所述精跟瞄模块中精跟瞄平台上方。方位轴粗跟踪模块和俯仰轴粗跟踪模块共同组成粗跟踪二维转台,可带动探测模块改变探测方向。
5、在上述一种粗精两级耦合跟瞄装置中,指控模块为计算机或工控机,通过数据线连接探测模块、方位轴粗跟踪模块、俯仰轴粗跟踪模块及精跟瞄模块。
6、在上述一种粗精两级耦合跟瞄装置中,方位轴粗跟踪模块包括转台底盘、转台支柱、方位轴电机固定支架、方位轴电机、方位轴减速机固定支架一、方位轴减速机固定支架二、方位轴减速机固定支架三、连接轴、方位轴减速机、方位轴下转盘、转台承重盘、轴承固定环一、轴承、轴承固定环二和方位轴上转盘。
7、在上述的方位轴粗跟踪模块中,方位轴电机为该模块的驱动设备,方位轴电机机身通过方位轴电机固定支架固定在转台底盘上方,方位轴电机输出端朝上;方位轴减速机固定支架一、方位轴减速机固定支架二和方位轴减速机固定支架三相连接构成减速机固定支架,方位轴减速机通过所述减速机固定支架固定在转台底盘上方;方位轴电机、连接轴、方位轴减速机、方位轴下转盘、方位轴上转盘依序连接且共轴,方位轴电机输出端与连接轴输入端固定连接,连接轴输出端与方位轴减速机输入端连接,方位轴减速机输出端固定连接其上方的方位轴下转盘,方位轴下转盘与方位轴上转盘固定连接。转台承重盘通过转台支柱固定在转台底盘,转台承重盘内径小于轴承外径且大于轴承内径;轴承固定环一和轴承固定环二将轴承外圈固定在转台承重盘;轴承及其上方器件的重量均由转台承重盘承受;方位轴上转盘和方位轴下转盘分别位于轴承内圈两侧,同轴且相互固定连接,能够实现同步转动。
8、在方位轴电机的驱动下,方位轴电机输出端、连接轴、方位轴减速机、方位轴下转盘、方位轴上转盘同轴转动,方位轴上转盘与方位轴电机的转速比与方位轴减速机的减速比相匹配。方位轴电机与方位轴减速机搭配使用,方位轴减速机的运用有效降低了方位轴电机本身的工作负荷和对性能的要求,同时提高了系统对方位角度和转速的精准控制能力。此外,该设计可为方位轴粗跟踪模块3提供多种控制方式,既能够采用位置控制模式调整方位轴角度以跟踪目标位置,又能够采用速度控制模式使方位轴转速匹配目标速度。
9、在上述一种粗精两级耦合跟瞄装置中,俯仰轴粗跟踪模块包括:俯仰轴电机固定支架、俯仰轴减速机固定支架、俯仰轴电机、俯仰轴减速机、连接轴、精跟瞄平台支架一、俯仰轴电机配件、精跟瞄平台支架二和精跟瞄平台转接板。
10、在上述的俯仰轴粗跟踪模块中,俯仰轴电机为俯仰轴粗跟踪模块的驱动设备,俯仰轴电机机身通过俯仰轴电机固定支架固定在方位轴粗跟踪模块中的方位轴上转盘上方;俯仰轴减速机通过俯仰轴减速机固定支架固定在俯仰轴电机固定支架侧上方;俯仰轴电机配件、俯仰轴电机、连接轴、俯仰轴减速机顺序连接且共轴,俯仰轴电机输出端通过连接轴连接俯仰轴减速机输入端;俯仰轴电机非输出端连接俯仰轴电机配件;精跟瞄平台转接板通过精跟瞄平台支架一、精跟瞄平台支架二分别连接俯仰轴减速机和俯仰轴电机配件。
11、在俯仰轴电机的驱动下,精跟瞄平台转接板可绕俯仰轴电机输出端、连接轴、俯仰轴减速机、俯仰轴电机配件所共有的中心轴旋转。俯仰轴电机与俯仰轴减速机搭配使用,俯仰轴减速机的运用有效降低了俯仰轴电机本身的工作负荷和对性能的要求,同时提高了系统对俯仰角度和转速的精准控制能力。
12、在上述一种粗精两级耦合跟瞄装置中,精跟瞄模块包括:精跟瞄平台、激光光源配件、激光光源、快反镜、快反镜配件一、快反镜配件二和快反镜配件三。
13、在上述的精跟瞄模块中,精跟瞄平台固定连接俯仰轴粗跟踪模块中的精跟瞄平台转接板;激光光源通过激光光源配件固定在精跟瞄平台上方;快反镜通过快反镜配件一、快反镜配件二和快反镜配件三固定在精跟瞄平台上方;激光光源配件、快反镜配件可分别用于调节激光光源、快反镜在精跟瞄平台上的位置,能够适配不同规格的激光光源;
14、方位轴粗跟踪模块和俯仰轴粗跟踪模块共同组成粗跟踪二维转台,可带动精跟瞄模块5改变精跟瞄方向。激光光源输出的激光光束入射到快反镜镜面,光束经镜面反射后射向探测模块中相机视轴所指向的方向;可通过调控快反镜微调激光光束指向。
15、在上述一种粗精两级耦合跟瞄装置中,各模块相互连接。探测模块、指控模块、方位轴粗跟踪模块、俯仰轴粗跟踪模块及精跟瞄模块相互连接。探测模块通过相机支架固定在精跟瞄模块中精跟瞄平台上方;指控模块通过数据线分别连接探测模块的相机、方位轴粗跟踪模块的方位轴电机、俯仰轴粗跟踪模块的俯仰轴电机、精跟瞄模块的快反镜;俯仰轴粗跟踪模块通过俯仰轴电机固定支架固定在方位轴粗跟踪模块的方位轴上转盘上方;精跟瞄模块通过精跟瞄平台固定在俯仰轴粗跟踪模块的精跟瞄平台转接板上方。
16、在上述一种粗精两级耦合跟瞄装置中,伺服电机与快反镜共同驱动设备实现跟瞄效果。方位轴粗跟踪模块和俯仰轴粗跟踪模块共同构成粗跟踪二维转台,在方位轴电机和俯仰轴电机的驱动下,可带动精跟瞄平台转接板及固定在其上的精跟瞄模块始终指向目标所在方向,确保目标处于精跟瞄范围(光束指向调控范围)内;通过控制快反镜微调光束指向,可实现对目标的精准跟瞄。
17、与现有技术相比,本发明的技术方案具有以下有益效果:
18、(1)本发明通过合理的空间布局和光路设计,精跟踪模块的核心器件均可通过配件实现位置调整,支持安装和运行大功率激光器。这种设计不但确保了光路的稳定性和光束质量,而且能够在不影响系统稳定性的前提下,有效利用激光器的能量,实现一定的毁伤效果,适用于长程监控和打击任务。
19、(2)本发明结合了伺服二维转台和快速偏转镜的优势。伺服二维转台负责驱动系统进行大范围的搜索和定位,而快速偏转镜则凭借其优异的响应速度和高精度,快速调整光路以实现精准瞄准。通过二者的协同作用,系统能够在复杂的应用环境中实现广域的目标跟踪和精确的目标跟瞄。
20、(3)本发明通过电机和减速机的协同配合,提高了系统的控制精度和稳定性。减速机的使用有效降低了电机本身的工作负荷和对性能的要求,同时提高了系统对速度和位置的精准控制能力。这种结构设计提高了系统的运动精度和稳定性,确保高效的目标跟踪和瞄准。
21、(4)本发明采用轴承承重设计,有效减轻驱动电机负载,降低系统惯性和摩擦力,显著提升系统的动态响应能力。轴承能够有效支撑平台重量,使电机仅需控制运动,不必承担静态负载,从而减少能量损失,能够增强系统的可靠性和耐用性。
22、(5)本发明对机械结构进行了模块化设计,使得各个功能模块能够根据具体应用需求进行改进和优化。这种设计不仅增强了系统的灵活性和可扩展性,还能够支持设备的后期升级和技术更新,延长设备的使用寿命,确保系统始终保持在技术前沿,并适应未来技术发展的需求。
- 还没有人留言评论。精彩留言会获得点赞!