一种无人机空速感测装置及飞行控制方法
本发明涉及无人机感知及控制,具体涉及一种无人机空速感测装置及飞行控制方法。尤其涉及一种测量无人机空速和位置的空速惯性里程计,以及相关的飞行状态估计与控制方法。
背景技术:
1、随着无人机技术的快速发展,微型固定翼无人机在各种特殊环境下的应用日益增多,如封闭空间探索、缺乏卫星定位的区域等。在这些情境下,确定无人机的精确位置至关重要,以支持其安全飞行、任务执行及空间定位需求。然而,由于微型无人机的载荷能力有限,传统的大尺寸、大功率、大算力的定位传感器难以搭载,这为实现准确的局部定位带来了挑战。为解决这一问题,研究人员开始探索利用测量流经无人机的气流速度来推断其位置的方法。这一方法被称为气流速度里程计。
2、气流速度里程计通过测量无人机相对于周围气流的位置变化,结合航位推算或数据融合技术,推算出无人机的位置信息。以往的研究主要集中在四旋翼无人机平台上,通过远距离布置传感器以减少螺旋桨流动对空速测量的影响。然而,即使采用这种方法,传统的空速传感器因其尺寸和重量较大在微型无人机上部署时受限制。
3、因此,近年来,研究人员开始探索开发更小型化、轻量化的空速传感器,以适应微型无人机的需求。这些新型传感器基于不同的原理,如量热式、超声波等,旨在提供精确的空速测量,从而支持微型无人机的局部定位。这一领域的进展为微型无人机在复杂环境中的应用提供了新的可能性,同时也为无人机定位技术的发展带来了新的挑战和机遇。
4、此外,如何有效地利用传感器收集的数据进行飞行控制是另一个关键的研究领域。无人机需要实时了解其当前的飞行状态,以执行复杂的飞行任务并维持稳定。这里涉及到一个关键的技术环节——状态估计。状态估计不仅提供速度和姿态信息,这些信息对于调整控制输入、保持或改变飞行方向和高度至关重要,同时也是确保无人机安全高效运行的基础。因此,研究和优化状态估计算法,以更好地解读传感器数据并转化为可靠的飞行控制信息,是当前无人机技术发展中的重要挑战和机遇。
技术实现思路
1、鉴于上述问题,本发明提供了一种无人机空速感测装置及飞行控制方法。无人机空速感测装置通过基于热线的空速传感器实现,并与惯性测量单元imu的量测结合,通过扩展卡尔曼滤波的状态估计方法进行数据融合,实现在线的无人机速度及位置感知,进一步解决无人机在封闭空间探索、缺乏卫星定位的区域等特殊环境下的局部定位问题,并改善飞行控制的效果。
2、本发明提供了一种无人机空速感测装置,包括:空速传感器单元一9、空速传感器单元二10、惯性测量单元11和数据融合估算模块;
3、所述空速传感器单元一9和空速传感器单元二10通过导线与所述数据融合估算模块连接;
4、所述惯性测量单元11与数据融合估算模块连接;所述惯性测量单元用于采集无人机的动态运动信息,获得与无人机姿态有关的加速度和角速度信息。
5、所述空速传感器单元一9、空速传感器单元二10分别设置在所述无人机两个机翼上,分别用于产生多个热敏电阻的温差,通过所述多个热敏电阻的温差得到无人机的三维空速;
6、优选的,所述无人机为微型固定翼无人机;
7、优选的,所述空速传感器单元一9包括:热敏电阻单元一2、保护层一以及柔性衬底一1;
8、所述保护层一与所述柔性衬底一连接,设置在所述无人机的机翼外侧;
9、所述热敏电阻单元一2封装着多个热敏电阻对7;
10、所述空速传感器单元一9还包括加热器一8;所述热敏电阻单元一2和加热器一8设置在所述保护层一上;
11、所述加热器一8设置在所述热敏电阻单元一2的中心位置;
12、所述每个热敏电阻对包括两个热敏电阻;所述每个热敏电阻对的两个热敏电阻以加热器一8为中心,对称设置;
13、进一步的,以加热器一8为中心,在加热器一8的外周,由内向外设置多组热敏电阻对7;所述热敏电阻对7中两两热敏电阻以加热器一8为中心,对称地设置在加热器一8的外周;
14、示例性的,所述多个热敏电阻以加热器一8为中心,按照十字形布置,两两对称地设置在加热器外周,呈正交分布;所述多组热敏电阻对通过保护层一和柔性衬底一设置在无人机的机翼外侧,测量正交的两个方向空速,获得无人机的三维空速。
15、所述空速传感器单元二10包括:热敏电阻单元二、加热器二、保护层二以及柔性衬底二;所述空速传感器单元二的设置方式与空速传感器单元一的设置方式一致。
16、可以理解的是,所述柔性衬底一为柔性印刷电路(fpc)线路;
17、所述热敏电阻通过微米级工艺制造并封装在柔性印刷电路(fpc)线路上。
18、本发明技术方案中多个热敏电阻按照十字形布置在无人机的机翼外侧,同时测量正交的两个方向,用来准确测量三维风速,在保持无人机外形完整性的前提下,提供了空速方向和大小的精确测量能力。
19、本发明中使用了多个超薄的热敏电阻作为每个风速传感器单元的核心元件,在风场中持续发热,在风速流动的上下游之间产生温差,通过所述温差反映热对流,抵消环境热影响,进一步推断出空气流动的方向性,反映出空速的变化。
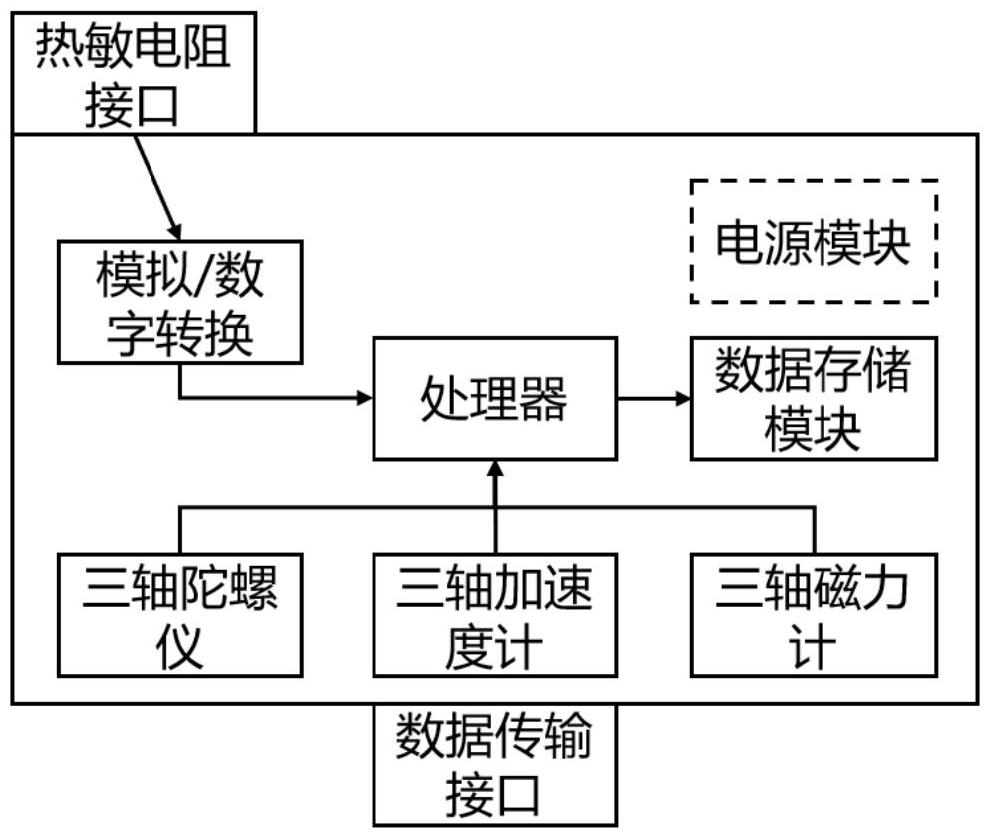
20、优选的,所述数据融合估算模块包括:模拟和/或数字转换单元、处理器和数据存储模块;
21、所述处理器分别连接所述模拟和/或数字转换单元和数据存储模块;
22、所述多个热敏电阻产生温差,所述温差经模拟和/或数字转换单元得到电压数据,所述电压数据传输至处理器;
23、优选的,所述惯性测量单元11包括三轴陀螺仪、三轴加速度计和三轴磁力计;所述惯性测量单元11为感应元件,用于输出测量信息;
24、所述三轴陀螺仪、三轴加速度计和三轴磁力计并联;所述三轴加速度计连接处理器;
25、所述三轴陀螺仪、三轴加速度计和三轴磁力计输出无人机的加速度和角速度,传输至处理器;如附图3所示,所述电压数据和无人机的加速度和角速度通过数据融合算法,得到无人机的位置。
26、优选的,所述无人机空速感应装置还包括:采样模块;
27、所述采样模块包括热敏电阻接口一12-1、热敏电阻接口二12-2和数据传输接口13;
28、所述热敏电阻接口一12-2分别连接空速传感器单元一和所述模拟和/或数字转换单元;所述热敏电阻接口二12-2分别连接空速传感器单元二和所述模拟和/或数字转换单元;
29、所述数据传输接口13连接所述三轴陀螺仪、三轴加速度计和三轴磁力计;
30、进一步的,所述热敏电阻接口一12-1和热敏电阻接口二12-2用于将空速传感器单元一和空速传感器单元二的电压数据传输至数据融合估算模块;
31、所述数据传输接口13用于将无人机的加速度和角速度等惯性测量信息传输至数据融合估算模块。
32、更进一步,所述处理器为滤波器数据融合模型;
33、更进一步,所述滤波器数据融合模型包括:滤波器一、神经网络、扩展滤波器一、滤波器二、扩展滤波器二;
34、所述电压数据通过滤波器一传输至神经网络,得到无人机的三维空速;
35、所述惯性测量单元输出无人机的加速度和角速度;再通过滤波器二传输至扩展滤波器一,得到姿态数据;
36、所述无人机的加速度和角速度通过滤波器二传输至扩展滤波器一,得到姿态数据;
37、所述无人机的三维空速和姿态数据输入扩展滤波器二,得到无人机的位置数据和速度数据;
38、更进一步,所述滤波器数据融合模型为扩展卡尔曼滤波器数据融合模型;
39、更进一步,所述扩展滤波器一和扩展滤波器二均为扩展卡尔曼滤波器。
40、进一步的,所述数据融合估算模块还包括采样模块;
41、本发明所述空速传感器单元分布在机翼的前缘和外段,最大程度减少机身遮蔽和干扰,提高测量精度。
42、本发明的空速传感器单元采用集成电路芯片(单片机)通过串行接口将集成电路芯片中的采集电路和飞行控制器14连接,建立实时通讯,用于传输空速传感器单元的数据;同时设置存储日志芯片,用于供飞行任务完成后单独分析来自于采样电路的数据;通过空速传感器单元传输的电压数据和动捕中测得的实际矢量空速数据,采用神经网络建立空速计算代理模型,简化后部署到处理器内,实现在线空速数据测量,进一步实现位置和速度计算以及飞行控制。
43、本发明另一个目的在于提供了一种无人机空速感测装置的飞行控制方法,包括:
44、基于空速传感器单元一9和空速传感器单元二10获取当前时刻的电压数据;
45、将当前时刻的电压数据输入数据融合估算模块的滤波器一和神经网络得到对应的空速数据;
46、基于惯性测量单元11获得当前时刻的无人机的加速度和角速度;
47、将当前时刻的无人机的加速度和角速度;通过数据融合估算模块的滤波器二输入扩展滤波器一进行融合,得到当前时刻的姿态数据;
48、将当前时刻的空速数据和当前时刻的姿态数据输入数据融合估算模块的扩展滤波器二进行融合,得到当前时刻的位置数据。
49、本发明采用并行处理的方式帮助空速惯性里程计更好地理解物体的运动状态,为无人机的姿态控制和定位提供更可靠的数据支持。
50、进一步的,所述姿态数据,表达式为
51、
52、其中,为第k个时刻无人机的姿态数据,为第k个时刻无人机的预测姿态数据,kk为第k个时刻的卡尔曼增益,h为测量方程,描述空速传感器测量与无人机状态的关联,zk是为第k个时刻空速传感器单元测量数据,即电压数据。
53、更进一步,所述第k个时刻的卡尔曼增益表达式为:
54、
55、其中,为第k个时刻的预测协方差,h为观测矩阵的雅可比矩阵,r为测量噪声协方差矩阵。
56、更进一步,所述第k个时刻无人机的预测姿态数据,表达式为
57、
58、其中,f(·)为状态转移方程,为第k-1个时刻无人机的预测姿态数据,为第k-1个时刻无人机的控制输入。
59、更进一步,所述第k个时刻无人机的预测协方差,表达式为
60、pk-=apk-1at+q
61、其中,a为状态转移矩阵的雅可比矩阵,与空速传感器量测结果有关,q为过程噪声协方差矩阵,pk-1为第k-1个时刻无人机的协方差。
62、更进一步,所述第k-1个时刻无人机的协方差,表达式为
63、
64、其中,i为单位矩阵。
65、本发明中卡尔曼滤波通过交替进行预测和更新步骤,不断迭代更新系统的状态估计,直至收敛于最优解或达到一定的迭代次数,它通过动态系统模型和传感器测量数据之间的交互,实现对系统状态的估计和预测。通过扩展卡尔曼滤波数据融合模型,里程计将会输出准确的位置和速度信息,将这些信息传输到飞控系统,以便进行更准确的飞行控制。
66、本发明采用并行处理的方式帮助空速惯性里程计更好地理解物体的运动状态,为无人机的姿态控制和定位提供更可靠的数据支持。通过扩展卡尔曼滤波数据融合模型,里程计将会输出准确的位置和速度信息。
67、本发明的无人机空速感测装置通过基于热线的空速传感器实现,并与惯性测量单元imu的量测结合,通过扩展卡尔曼滤波的状态估计方法进行数据融合,实现在线的无人机速度及位置感知,进一步解决无人机在封闭空间探索、缺乏卫星定位的区域等特殊环境下的局部定位问题,并改善飞行控制的效果。
68、可以理解的是,所述局部定位问题包括在执行如搜索救援、农业监测或基础设施检查的特定任务时,无人机可能需要在一个明确定义的小区域内进行精细操作。
69、与现有技术相比,本发明至少具有现如下有益效果:
70、(1)本发明将空速传感器单元根据无人机外形进行设计,在不破坏外形、不额外增加较多重量的前提下,为无人机提供空速和位置的量测能力;
71、(2)本发明设计位姿估算单元,获得准确的无人机位置和速度数据,适用于微型固定翼无人机;
72、(3)本发明实现与飞控实时的通讯,在线部署空速惯性里程计,达到实时量测的效果。
- 还没有人留言评论。精彩留言会获得点赞!