目标检测的方法、集成电路、传感器、设备及介质与流程
本公开实施例涉及但不限于目标检测,尤其涉及一种目标检测的方法、集成电路、电磁波传感器、设备及计算机可读存储介质。
背景技术:
1、针对目标探测系统的回波信号处理,一般包括依次进行的混频、模数转换、采样、距离维傅里叶变换、速度维傅里叶变换、二维恒虚警检测等过程。但是,在对短距密封或相对密封的空间区域中进行目标检测时,例如针对汽车舱内进行回波信号处理时,由于强静态杂波和多径的影响,会存在诸如检测率较低、虚警目标较多、角度估计不准等问题,从而导致目标检测的准确度较低。
技术实现思路
1、本公开实施例提供了一种目标检测的方法、集成电路、电磁波传感器、设备及计算机可读存储介质,能够提高目标检测的准确率。
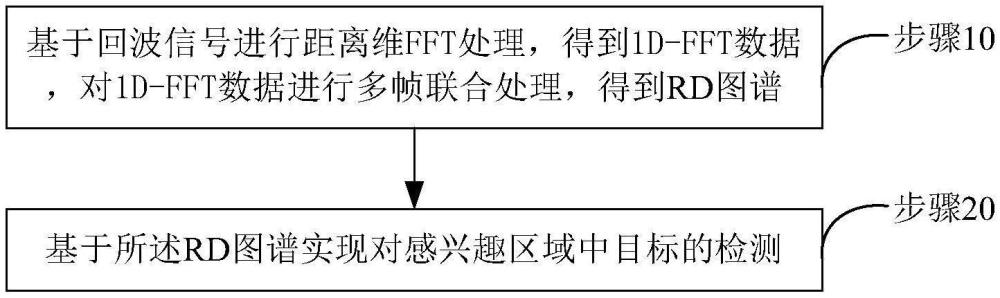
2、一方面,本公开实施例提供了一种目标检测方法,包括:基于回波信号进行距离维fft处理后,得到1d-fft数据,对所述1d-fft数据进行多帧联合处理,得到rd图谱;基于所述rd图谱实现对感兴趣区域中目标的检测。
3、在示例性实施例中,所述基于回波信号进行距离维fft处理后,得到1d-fft数据,对所述1d-fft数据进行多帧联合处理,得到rd图谱,包括:对回波信号进行啁啾内的距离维fft处理后,得到1d-fft数据;对所述1d-fft数据进行帧数据积累,直至积累至预设的数据量后,进行帧间的fft处理,得到rd图谱,即距离多普勒图谱或数据。其中预设的量的周期长度可基于所检测目标的特征参数的周期长度进行设定,例如针对人进行呼吸检测时,则可基于人类(也可选择成年人或婴幼儿等特定的人群)的呼吸频率范围设定帧的数量,后续则可基于该预定数量帧的帧数据进行帧间的fft处理,以实现对目标区域中人体进行检测及识别等操作。
4、在示例性实施例中,所述基于所述rd图谱实现对感兴趣区域中目标的检测,包括:
5、对各通道的rd图谱进数量行非相干积累,基于非相干累积结果进行基于噪声估计的第一恒虚警处理,得到候选目标检测点;对所述候选目标检测点进行第二恒虚警处理,基于第二恒虚警处理结果进行目标检测。
6、另一方面,本公开实施例提供了一种目标检测方法,包括:对回波信号进行啁啾内的距离维fft和帧间的速度维fft,得到距离速度维数据;对所述距离速度维数据进行第一恒虚警处理,得到候选目标检测点;对所述候选目标检测点进行第二恒虚警处理,基于第二恒虚警处理结果进行目标检测。
7、在示例性实施例中,所述对回波信号进行啁啾内的距离维fft和帧间的速度维fft,得到距离速度维数据,包括:回波信号进行啁啾内的距离维fft处理后,得到1d-fft数据;对所述1d-fft数据进行帧数据积累,直至积累至预设的数据量后,进行帧间的速度维fft处理,得到距离速度维数据。
8、在示例性实施例中,所述对所述距离速度维数据进行第一恒虚警处理,得到候选目标检测点,包括:对多个通道的距离速度维数据进行非相干积累,基于非相干积累结果进行基于噪声估计的第一恒虚警处理,得到候选目标检测点。
9、在示例性实施例中,所述第二恒虚警处理包括:对方位角和俯仰角分别进行daecfar处理。
10、在示例性实施例中,所述对所述候选目标检测点进行第二恒虚警处理,包括:对所述候选目标检测点进行数字波束成形处理,之后进行基于噪声估计的第二恒虚警处理,得到滤除了虚假目标点的筛选结果。
11、在示例性实施例中,所述对所述候选目标检测点进行第二恒虚警处理,包括:对所述候选目标检测点进行方位角维度dbf,结合噪底估计结果进行方位角恒虚警处理,得到方位角维度目标筛选结果;和/或对所述候选目标检测点进行俯仰角维度dbf,结合噪底估计结果进行俯仰角恒虚警处理,得到俯仰角维度目标筛选结果。
12、在示例性实施例中,所述对所述候选目标检测点进行第二恒虚警处理,包括:对所述候选目标检测点进行方位俯仰二维dbf,结合噪底估计结果进行方位角俯仰角恒虚警处理,得到方位俯仰二维目标筛选结果。
13、在示例性实施例中,所述噪底估计结果采用以下方式获得:对当前维度的dbf谱进行统计,选取分位数值作为当前维度的噪底估计结果。
14、在示例性实施例中,在进行dbf时,获取dbf谱中所有峰值的幅值,对任一峰值,判断若其信噪比超过预定阈值,且其幅值与全局最大幅值之间的差值在预设范围内,且已经输出的峰值数量小于预设数量,则将该峰值作为目标筛选结果输出。
15、在示例性实施例中,所述对所述候选目标检测点进行第二恒虚警处理,基于第二恒虚警处理结果进行目标检测,包括:在第二恒虚警处理时,对所述候选目标检测点进行以下操作中的一种或多种,得到目标检测结果:全局最大值筛选、第一门限值筛选,和第二门限值筛选,其中全局最大值筛选用于筛选全局最大值是否为目标检测点,所述第一门限值筛选根据候选筛选结果与噪底估计值的关系判断当前候选筛选结果是否为目标检测点,所述第二门限值筛选根据候选筛选结果与全局最大值的关系判断当前候选筛选结果是否为目标检测点。
16、在示例性实施例中,所述全局最大值筛选包括:判断当前全局最大值对应的数字波束成形谱幅度值与噪底估计值的差值是否在第一预设范围内,如果在所述第一预设范围内,则该全局最大值对应的候选筛选结果为目标检测点;所述第一门限值筛选包括:判断当前候选筛选结果与噪底估计值的差值是否在第二预设范围内,如果在所述第二预设范围内,则当前候选筛选结果为目标检测点;所述第二门限值筛选包括:判断当前候选筛选结果的功率值与全局最大值的功率的差值是否在第三预设范围内,如果在所述第三预设范围内,则当前候选筛选结果为目标检测点。
17、在示例性实施例中,所述对多个通道的距离速度维数据进行非相干积累,基于非相干积累结果进行基于噪声估计的第一恒虚警处理,包括:对多个通道的距离速度维数据进行非相干积累,估计非相干积累后每个距离单元的噪底,得到每个距离单元的噪底估计值,利用所述噪底估计值进行非相干恒虚警处理,其中,估计非相干积累后每个距离单元的噪底时,利用全局噪底对每个距离单元的噪底进行调整。
18、在示例性实施例中,所述估计非相干积累后每个距离单元的噪底时,利用全局噪底对每个距离单元的噪底进行调整,包括:采用以下方式对每个距离单元的噪底进行调整:ni′=min(ni,α*ng),其中,ni为第i个距离单元原始的噪底估计值,而ng为多个距离单元的噪底估计值的均值,ni′为第i个距离单元调整后的噪底估计值,α>1。
19、在示例性实施例中,所述积累至预设的数据量后,进行帧间的速度维fft处理,可包括:采用滑窗方式每次读取预设帧数的1d-fft数据进行帧间的速度维fft处理。
20、在示例性实施例中,所述基于第二恒虚警处理结果进行目标检测,包括:将感兴趣区域预先划分为多个目标子区域,根据目标检测后得到的目标检测点位置确定每个子区域的目标点数量及位置,根据每个子区域中目标点数量占目标总数量的比值是否大于预设比例值判断当前子区域中是否有待检测目标。
21、另一方面,本公开实施例还提供了一种目标检测的方法,应用于对特定目标区域进行目标检测,所述方法包括:对距离-多普勒数据进行第一恒虚警处理后,继续进行角度维的第二恒虚警处理以获取目标数据。
22、另一方面,本公开实施例还提供了一种集成电路,包括:信号发射模块,被配置为用于目标检测的电磁波;信号接收模块,被配置为用于接收所述电磁波被反射和/或散射所形成的回波;以及处理模块,被配置为用于根据如前所述的目标检测方法对所述回波信号进行处理,以实现目标检测。
23、在示例性实施例中,所述处理模块包括基带单元,所述基带单元可被配置为用于实现如前所述的距离维fft、速度维fft、第一恒虚警处理和第二恒虚警处理。
24、在示例性实施例中,所述处理模块还包括mcu单元,当所述方法包括数字波束合成和帧数据积累时,所述基带单元被配置为用于实现所述数字波束合成,所述mcu单元被配置为用于实现所述帧数据积累。
25、在示例性实施例中,所述集成电路为毫米波芯片或传感器芯片。
26、再一方面,本公开实施例还提供了一种电磁波传感器,包括:承载体;如前所述的集成电路,设置在所述承载体上;天线,设置在所述承载体上,或者所述天线与所述集成电路集成为一体器件设置在所述承载体上;其中,所述集成电路与所述天线连接,用于发射所述电磁波信号和/或接收所述回波信号。
27、再一方面,本公开实施例还提供了一种终端设备,包括:设备本体;以及设置于所述设备本体上的如前所述的电磁波传感器;其中,所述电磁波传感器用于目标检测和/或通信,以向所述设备本体的运行提供参考信息。
28、再一方面,本公开实施例还提供了一种非瞬时性计算机可读存储介质,其上存储有计算机可读指令,当所述指令被处理器执行时,使得所述处理器执行如前所述的目标检测方法。
29、采用本公开实施例的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本公开而了解。本公开的其他优点可通过在说明书、权利要求书以及附图中所描述的方案来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!