一种无人机实时纠错导航监控方法、系统及介质与流程
本发明涉及无人机监控,具体涉及一种无人机实时纠错导航监控方法、系统及介质。
背景技术:
1、无人机导航模拟是通过计算机仿真技术模拟无人机在各种环境条件下的导航行为和性能。这种模拟可以用于训练飞行员、测试导航算法、规划任务以及评估系统性能。无人机在执行导航监控的飞行任务时,通常需要全面地对目标区域进行巡航,因此需要规划较佳的导航路线。
2、现有技术通常将预设的导航路径导入无人机进行侦察执行,在改变任务指令或者改变侦察区域时,无法根据已有数据和当前无人机状态快速进行准确的导航路线的规划;也不考虑风速、风向、地形等因素对航路的影响,导致规划出的飞行航线与实际相差较大;也无法根据飞机当时的气象条件实时调整飞行航线,从而影响飞行安全;同时也无法控制当前无人机执行侦察的导航路线是否能够始终保持在地面站可监测范围内,因此需要一种能够实时规划、纠错的导航方法,确保飞行路径的合理性以及安全性。
技术实现思路
1、为解决上述问题,本发明提供一种无人机实时纠错导航监控方法、系统及介质,该方法能够精准获取导航线路,实时纠错导航,确保在安全范围内飞行。
2、为实现上述目的,本发明提供了如下的技术方案。
3、一种无人机实时纠错导航监控方法,包括以下步骤:
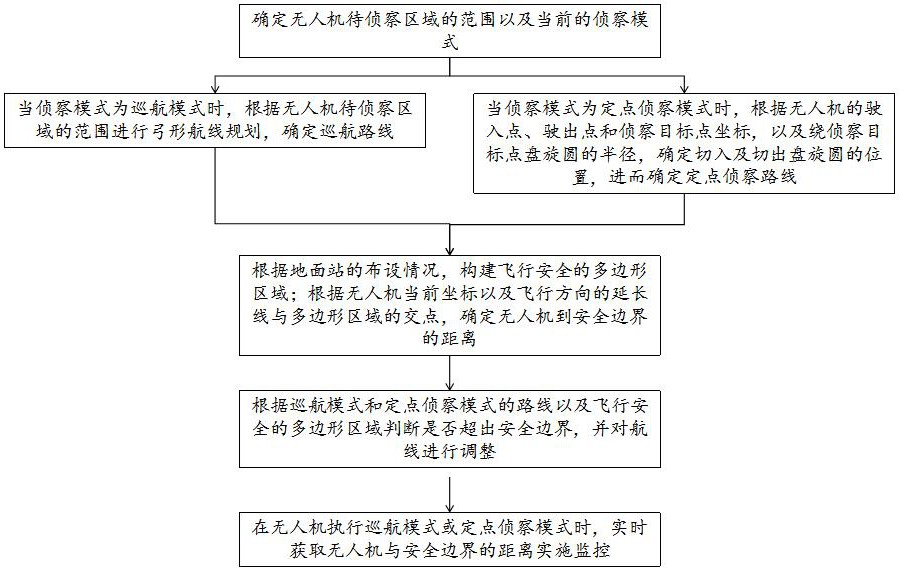
4、确定无人机待侦察区域的范围以及当前的侦察模式;
5、当侦察模式为巡航模式时,根据无人机待侦察区域的范围进行弓形航线规划,确定巡航路线;当侦察模式为定点侦察模式时,根据无人机的驶入点、驶出点和侦察目标点坐标,以及绕侦察目标点盘旋圆的半径,确定切入及切出盘旋圆的位置,进而确定定点侦察路线;
6、根据地面站的布设情况,构建飞行安全的多边形区域;根据无人机当前坐标以及飞行方向的延长线与多边形区域的交点,确定无人机到安全边界的距离;
7、根据巡航模式或定点侦察模式的路线以及飞行安全的多边形区域判断是否超出安全边界,并对航线进行调整;
8、在无人机执行巡航模式或定点侦察模式时,实时获取无人机与安全边界的距离实施监控。
9、优选地,所述弓形航线的规划,包括以下步骤:
10、确定空间直角坐标下的无人机待侦察区域的范围、中心点坐标以及倾斜角;确定无人机执行侦察时相对于侦察区域的高度以及弓形航线的间距,其中,所述弓形航线的间距满足无人机执行侦察时采集的图像重叠率符合预设值;
11、根据待侦察区域的范围、中心点坐标,计算当前无倾斜角的弓形航线所有航点的坐标;基于倾斜角对所有航点的坐标进行变换获得侦察区域在该倾斜角时的弓形航线航点的坐标,并进行大地坐标转换,确定巡航路线。
12、优选地,所述根据待侦察区域的范围、中心点坐标,计算当前无倾斜角的弓形航线所有航点的坐标,包括以下步骤:
13、假设待侦察区域倾斜角为0度,将侦察区域的中心点的经纬度坐标(lc,bc),转换为直角坐标(xc,yc),计算区域顶点的位置,其中,该顶点为弓形航线的起始点,起始点坐标(x0,y0)如下式所示:
14、式中,dw为待侦察区域的宽度;dh为待侦察区域的长度;
15、以四个点为一个循环,弓形航线点的总个数为n=(dh/d+1)*2,式中,dh为待侦察区域的长度,d为弓形航线的间距;
16、从第1个点开始,即i=1、2、3……n,其坐标(xi,yi)与前面点的坐标(xi-1,yi-1)关系为:
17、当i%4=1时:
18、当i%4=2或0时:
19、当i%4=3时:
20、利用坐标变换计算侦察区域倾斜角为 θ时的弓形航线航点位置(,),如下式所示:
21、
22、式中,k为航点序号,(xk,yk)为航点坐标;
23、将所有弓形航线点的直角坐标位置转化为大地坐标的经纬度坐标。
24、优选地,所述大地坐标转换,包括以下步骤:
25、空间直角坐标系与大地坐标系关系如下式所示:
26、
27、式中: n为某点p的卯酉圈半径; x, y, z为空间直角坐标系; b, l, h为p点的大地坐标系;
28、卯酉圈半径 n公式如下式所示:
29、
30、式中:为椭球长半轴, b为椭球短半轴, e为第一离心率, b为大地维度,则大地坐标计算方式如下式所示:
31、。
32、优选地,所述定点侦察路线的构建,包括以下步骤:
33、当侦察模式为定点侦察模式时,确定从大地坐标转换到空间直角坐标下无人机的驶入点、驶出点和侦察目标点坐标以及侦察目标点盘旋圆的半径,计算获得驶入点和驶出点到侦察目标点的距离;
34、分别通过驶入点和驶出点作盘旋圆的切线,确定驶入点和驶出点与切点的距离,并求解驶入点和驶出点到侦察目标点的方向角以及与两个切线的夹角;其中,所述方向角为与正北方向夹角;
35、根据驶入点和驶出点到侦察目标点的方向角,以及驶入点和驶出点到侦察目标点与两个切线的夹角,确定两个切线的方向角;
36、根据驶入点和驶出点的坐标、两个切线的方向角以及驶入点和驶出点到切点的距离,确定切点的坐标,并进行大地坐标转换;根据切点的坐标确定定点侦察路线。
37、优选地,所述根据驶入点和驶出点的坐标、两个切线的方向角以及驶入点和驶出点到切点的距离,确定切点的坐标,包括以下步骤:
38、确定驶入点a的经纬度坐标(la,ba),驶出点b经纬度坐标(lb,bb),侦察目标点的经纬度(lt,bt),海拔为ht,无人机在执行侦察任务时相对目标区域的高度为h,无人机围绕目标点作圆周飞行时的盘旋圆的半径rt;
39、分别将驶入点a、驶出点b以及侦察目标点的经纬度坐标(la,ba)、(lb,bb)以及(lt,bt)转换为平面直角坐标(xa,ya)、(xb,yb)以及(xt,yt),根据3点的位置计算出驶入点至侦察目标点的距离dat,驶出点至侦察目标点的距离dbt:
40、
41、通过驶入点作盘旋圆的切线,切点为s点,通过驶出点作盘旋圆的切线,切点为e点,计算驶入点至s点的距离das以及驶出点至e点的距离dbe:
42、
43、计算驶入点与目标点侦察目标点连线的方向角α,线段at与as形成的夹角为δα:
44、
45、计算驶出点与目标点侦察目标点连线的方向角β,线段bt与be形成的夹角为δβ:
46、
47、根据驶入点和驶出点到侦察目标点的方向角,以及驶入点和驶出点到侦察目标点与两个切线的夹角,确定两个切线的方向角α′和β′;其中,西方向驶入和驶出时:
48、
49、东方向驶入和驶出时:
50、
51、根据方向角α′和β′,驶入点直角坐标(xa,ya)和驶出点直角坐标(xb,yb),距离das和距离dbe,计算s点和e点的位置(xs,ys)和(xe,ye):
52、
53、
54、利用坐标转换将切点s点和e点的直角坐标(xs,ys)和(xe,ye)转换为经纬度(ls,bs)和(le,be);
55、根据切点的坐标确定定点侦察路线。
56、优选地,所述无人机与安全边界距离的计算,包括以下步骤:
57、确定地面站数量和坐标,作为顶点,相邻的顶点连线形成边,当多个边不存在相交时,构成多边形区域;
58、从无人机当前位置点沿飞行方向做一条线段,确保与多边形区域相交;
59、求解线段与多边形区域每条边线的交点,求解交点到无人机当前位置点距离,即为无人机与安全边界距离。
60、一种无人机实时纠错导航监控系统,所述系统包括:
61、处理器;
62、存储器,其上存储有可在所述处理器上运行的计算机程序;
63、其中,所述计算机程序被所述处理器执行时实现所述的无人机实时纠错导航监控方法的步骤。
64、一种计算机可读存储介质,所述计算机可读存储介质上存储有数据处理程序,所述数据处理程序被处理器执行时实现所述的无人机实时纠错导航监控方法的步骤。
65、本发明的有益效果:
66、本发明提出了一种无人机实时纠错导航监控方法、系统及介质,该方法完成无人机的任务指令的读取、无人机实时状态估计、位置/姿态/控制回路等导航飞控环节,能够精准获取导航线路,确保在安全范围内飞行。与现有技术相比,能够快速、精确地进行航线规划,并实时调整自适应,保证飞行的安全性以及任务执行的高效可靠性。
- 还没有人留言评论。精彩留言会获得点赞!