簧载质量参数动态测试与车辆安全行驶预警方法及系统
本技术涉及车辆工程,特别涉及一种簧载质量参数动态测试与车辆安全行驶预警方法及系统。
背景技术:
1、车辆质心的位置是影响车辆操控的最主要因素,车辆质心位置靠近前轴,转向时会产生转向不足问题,尤其是在雨雪、沙土等低附着路面行驶时,容易无法跟随驾驶员意图,弯道容易冲出路面。当车辆货物装载过多时,会导致质心位置靠近后轴,车辆行驶时出现转向过度,发生急转,失去控制。此外大型车辆由于质心位置偏高,导致弯道行驶速度不能过高,容易发生侧翻。在车辆设计时,对质心位置进行过详细测量,但实际使用时,很多场合超出车辆设计规范,如大型车辆,装载货物过多,货物装载不均匀等,因此,车辆质心的动态在线测量与大偏差预警是保证车辆行驶安全的重要内容之一。
2、测量车辆质心平面坐标的传统方法是在车辆每个车轮下摆放电子称重传感器,根据前后车轮分担的整车重量,进行计算质心到前后轴距离,根据左右轮分担的整车重量,计算质心到左右侧距离。测量质心高度的方法是将车辆停放在具有一定坡度的坡道上,同样需要在每个车轮下摆放电子称重传感器,根据坡道角度和各个称重传感器数值,计算质心高度。同样,上述测量方法可以在专用的试验台进行实现,需要保证试验台水平和固定某一倾斜角度。传统转动惯量测试方法,是将车辆放置在专用的摇摆试验台上,每个车轮下面安装载荷传感器。对整个试验台进行俯仰与侧倾、横摆控制,对试验台施加一定频率的往复运动,根据安装的加速度传感器进行角速度控制,同时测量连接部件受力,根据力矩平衡关系,求得转动惯量。
3、传统方法对质心位置和惯量的测量优势是测试环境较好,无其他干扰,测量结果相对准确,然而,其缺点是无法考虑到车辆实际使用过程中的各种变化因素,尤其是车辆载人与装载货物较多时,超出车辆转动惯量的安全范围、载荷变化引起的质心高度的降低、转动惯量的增大等。此外,测量结果的准确性还受到车辆运动状态的影响,比如车辆转向行驶时的侧倾,导致质心位置发生的偏移等。使得制动防抱死系统(abs)、转弯车身稳定性控制(esc)、主动悬架控制(ass)等底盘安全控制系统的控制效果大大降低,甚至失效。因此,车辆惯量的动态在线测量是保证车辆底盘控制系统控制能力的关键内容之一。
技术实现思路
1、本技术实施例提供一种簧载质量参数动态测试与车辆安全行驶预警方法及系统,弥补底盘控制器使用固定的设计参数而无法有效控制车辆的弊端,提供给底盘控制器,优化整车控制效果。
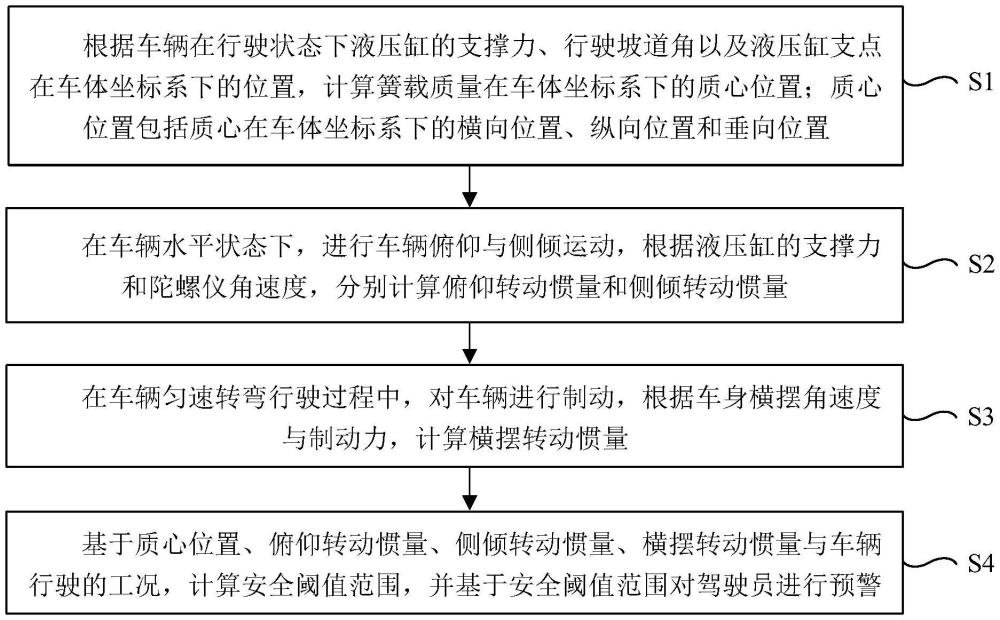
2、为解决上述技术问题,第一方面,本技术实施例提供一种簧载质量参数动态测试与车辆安全行驶预警方法,用于主动悬架车辆,包括以下步骤:首先,根据车辆在行驶状态下液压缸的支撑力、行驶坡道角以及液压缸支点在车体坐标系下的位置,计算簧载质量在车体坐标系下的质心位置;质心位置包括质心在车体坐标系下的横向位置、纵向位置和垂向位置;然后,在车辆水平状态下,进行车辆俯仰与侧倾运动,根据液压缸的支撑力和陀螺仪角速度,分别计算俯仰转动惯量和侧倾转动惯量;接下来,在车辆匀速转弯行驶过程中,对车辆进行制动,根据车身横摆角速度与制动力,计算横摆转动惯量;最后,基于质心位置、俯仰转动惯量、侧倾转动惯量、横摆转动惯量与车辆行驶的工况,计算安全阈值范围,并基于安全阈值范围对驾驶员进行预警。
3、在一些示例性实施例中,根据车辆在行驶状态下液压缸的支撑力、行驶坡道角以及液压缸支点在车体坐标系下的位置,计算簧载质量在车体坐标系下的质心位置,包括:若车辆在平直道路上匀速行驶或小加速度行驶时,控制主动液压悬架保持车辆水平,根据每个液压缸的支撑力与液压缸支点在车体坐标系的位置,分别计算簧载质量质心在车体坐标系下的横向位置与纵向位置;若车辆产生较大的纵向与侧向加速度或车辆在坡度较大的道路上匀速行驶时,质心的偏移对液压缸产生载荷转移,根据每个液压缸的支撑力与行驶坡道角和液压缸在车体坐标系的位置,计算簧载质量质心的垂向位置。
4、在一些示例性实施例中,在车辆水平状态下,进行车辆俯仰与侧倾运动,根据液压缸的支撑力和陀螺仪角速度,分别计算俯仰转动惯量和侧倾转动惯量,包括:在车辆水平状态下,控制主动液压悬架产生不同角加速度的俯仰运动,根据多种角加速度情况下测量得到的不同俯仰转动惯量,得到准确的俯仰转动惯量;所述不同俯仰转动惯量包括液压缸的支撑力、位移、俯仰与侧倾角、角速度以及侧向加速度;在车辆水平状态下,控制主动液压悬架产生不同角加速度的侧倾运动,根据多种角加速度情况下测量得到的不同侧倾转动惯量,得到准确的侧倾转动惯量;所述不同侧倾转动惯量包括液压缸的支撑力、位移、俯仰与侧倾角、角速度以及侧向加速度。
5、在一些示例性实施例中,在车辆匀速转弯行驶过程中,对车辆进行制动,根据车身横摆角速度与制动力,计算横摆转动惯量,包括:在车辆转向时,保持车身水平,同时对车辆进行制动,根据车身横摆角加速度的变化与制动力,计算车辆的横摆转动惯量,并进行多次计算,获取准确的横摆转动惯量。
6、在一些示例性实施例中,质心位置的计算包括质心水平位置的计算和质心高度的计算,其中,质心水平位置的计算公式如下所示:
7、flf+frf+flr+frr=msg
8、(flf+frf)l=msg lr
9、(flr+frr)l=msg lf
10、(flf+flr)t=msg tr
11、(frf+frr)t=msg tl
12、其中,flf,frf,flr,frr分别为左前、右前、左后、右后悬架液压缸的支撑力;msg为车辆的重力,ms为车辆的质量;tl,tr分别为质心到左侧、右侧悬架液压缸支点的距离;lr,lf分别为质心到前、后轴液压缸支点的距离;t=tl+tr,t为液压缸左右支点的距离;l=lf+lr,l为液压缸前后支点的距离。
13、在一些示例性实施例中,在测量质心高度时,使车辆分别处于最大俯仰角和最大侧倾角时来测量,共计四种车身姿态,分别为+αmax,-αmax,+βmax,-βmax,得到的质心高度分别为z1,z2,z3,z4;质心高度的计算公式如下:
14、(flf+frf)l=msg(lf-z1 sinαmax)
15、(flr+frr)l=msg(lr-z2 sinαmax)
16、(flf+flr)t=msg(tr-z3 sinβmax)
17、(frf+frr)t=msg(tl-z4 sinβmax)
18、在得到质心高度z1,z2,z3,z4之后,根据均值确定准确的质心高度。
19、在一些示例性实施例中,俯仰转动惯量、侧倾转动惯量、横摆转动惯量的测量分别通过俯仰运动方程式、侧倾运动方程式、横摆运动方程式计算;其中,
20、车辆的俯仰运动方程式为:
21、
22、车辆的侧倾运动方程式为:
23、
24、车辆的横摆运动方程式为:
25、
26、其中,iy,ix,iz分别为车辆的俯仰转动惯量、侧倾转动惯量和横摆转动惯量;分别为车辆的俯仰角加速度、侧倾角加速度、横摆角加速度;flf,frf,flr,frr分别为左前、右前、左后、右后悬架液压缸的支撑力;tl,tr分别为质心到左侧、右侧悬架液压缸支点的距离;lr,lf分别为质心到前、后轴液压缸支点的距离;rlf,rrf,rlr,rrr分别为左前、右前、左后、右后车轮制动力;bl,br分别为质心到左右侧车轮轮心接地点连线的距离。
27、在一些示例性实施例中,所述安全阈值范围的计算,包括:计算行驶工况预警指数;基于行驶工况预警指数,计算安全阈值范围;行驶工况预警指数的计算公式为:
28、j=ω1v+ω2ay+ω3δ+ω4δix+ω5δiy+ω6δiz+ω7δx+ω8δy+ω9δz
29、其中,j为行驶工况预警指数;v为车速,ay为侧向加速度,δ为方向盘转角,δix,δiy,δiz均为转动惯量超出设计值的偏差,δx,δy,δz均为质心位置超过设计值的偏差;ω1,ω2,…ω9为参数按权重累加得到的加权系数。
30、第二方面,本技术实施例提供了一种簧载质量关键参数动态测试与车辆安全行驶预警系统,采用上述实施例所述的簧载质量参数动态测试与车辆安全行驶预警方法进行测试和预警,包括:液压缸、陀螺仪、方向盘角度传感器、制动管路压力传感器以及数据采集与计算控制器;液压缸用于支撑车辆,并分别控制各个悬架的压缩与回弹,实现车辆的升沉、俯仰、侧倾与扭转控制;方向盘角度传感器是用于测量车辆行驶时方向盘角度,从而识别驾驶员的驾驶意图,并根据所述方向盘角度计算车辆转向半径、行驶轨迹以及车身及车轮侧偏角;陀螺仪用于测量车辆运动时的纵向加速度、侧向加速度、垂向加速度、俯仰角速度、侧倾角速度以及横摆角速度;制动管路压力传感器是测量车辆制动时液压管路的压力,将压力信号转换为电压或者电流信号,并将电压或者电流信号发送至数据采集与计算控制器,用来计算制动力矩;数据采集与计算控制器用于实时采集车辆悬架各个液压缸的两腔压力,根据压差计算对车身的支撑力,同时采集液压缸位移作为控制输入,并读取陀螺仪、制动管路压力传感器、方向盘角度传感器测得的参数数据,实现车辆各个悬架的液压缸自动升降控制,满足在线测试质心位置与转动惯量的要求,并根据行车速度、侧向加速度、方向盘转角、以及质心位置和转动惯量超出设计中的偏差数据,加权平均,给出行驶工况预警。
31、在一些示例性实施例中,上述簧载质量参数动态测试与车辆安全行驶预警系统,还包括:液压动力单元、伺服阀、第一压力传感器、第二压力传感器、位移传感器、蓄能器;液压动力单元用于给液压系统提供压力油;伺服阀用于驱动液压缸升降;第一压力传感器和第二压力传感器为测量油缸两腔工作压力的变送器,将压力信号转换为电流信号,并将电流信号输入至数据采集与计算控制器中;位移传感器为测量液压缸伸缩行程的传感器,所述位移传感器通过固定部件安装在液压缸外壳上,并通过随动部件与液压杆连接在一起;当液压杆伸缩时,位移传感器实时测量到位移的变化,并将对应的电压或者电流信号发动给数据采集与计算控制器;蓄能器为液压系统能量存储部件,通过存储液压能,在车辆连续动作时,能够快速供给大量的液压油,从而降低对液压泵的排量和总功率的要求。
32、本技术实施例提供的技术方案至少具有以下优点:
33、本技术实施例提供一种簧载质量参数动态测试与车辆安全行驶预警方法及系统,用于主动悬架车辆,该方法包括以下步骤:首先,根据车辆在行驶状态下液压缸的支撑力、行驶坡道角以及液压缸支点在车体坐标系下的位置,计算簧载质量在车体坐标系下的质心位置;质心位置包括质心在车体坐标系下的横向位置、纵向位置和垂向位置;然后,在车辆水平状态下,进行车辆俯仰与侧倾运动,根据液压缸的支撑力和陀螺仪角速度,分别计算俯仰转动惯量和侧倾转动惯量;接下来,在车辆匀速转弯行驶过程中,对车辆进行制动,根据车身横摆角速度与制动力,计算横摆转动惯量;最后,基于质心位置、俯仰转动惯量、侧倾转动惯量、横摆转动惯量与车辆行驶的工况,计算安全阈值范围,并基于安全阈值范围对驾驶员进行预警。
34、本技术提供的簧载质量参数动态测试与车辆安全行驶预警方法及系统通过控制车辆俯仰与侧倾,可根据测控系统获得的支撑力、位移、俯仰与侧倾角、角速度、侧向加速度等,依据车辆动力学原理计算出质心位置和转动惯量。本技术提供的动态测试方法不仅适用于安装主动液压悬架的两轴车,也可用于安装有主动悬架的多轴车辆,将多轴车最前轴和最后轴作为两轴车计算,中间轴根据侧倾与俯仰角,按比例折算实际位移,保证车体个油缸支点都在同一平面内。
- 还没有人留言评论。精彩留言会获得点赞!