基于移动浮船的在线检测方法以及系统与流程
本发明涉及基于移动浮船的在线检测系统,尤其涉及一种基于移动浮船的在线检测方法以及系统。
背景技术:
1、随着科技的发展,移动浮船作为水上工具,并在水面上移动,移动浮船移动至预设检测点,并在预设检测点中进行停留,此时,移动浮船在停留状态下进行取水,并在检测过程中无法动态移动,同时,移动浮船一般是针对单一水面中行驶或者检测,无法针对阶梯式水面进行多个水面的移动。
技术实现思路
1、本发明的目的在于克服现有技术的不足,本发明提供了一种基于移动浮船的在线检测方法以及系统,在移动浮船处于阶梯式水面时,采集移动浮船相对于阶梯式水面的空间位置,并检测移动浮船所在的水面以及相邻的水面的高度差;定位移动浮船所在的水面以及相邻的水面之间的相连处,并定义该相连处的倾斜度;基于高度差、倾斜度以及移动浮船的动力性能定义移动浮船所在的水面以及相邻的水面之间的移动轨迹,从而把控移动浮船在多个水面的相连处的移动轨迹,并针对移动浮船在相连处的移动进行发自主避障操作,以动态优化移动轨迹,实现了移动浮船在阶梯式水面中的多个水面的移动,保证了移动浮船在跨越不同水面的移动稳定性,同时,移动浮船在移动过程中在线检测对应的水面参数,并将移动轨迹以及多个水面参数进行关联,以构建阶梯式水面的参数图;基于阶梯式水面的参数图以及移动浮船的移动状态标记多个取水节点,并基于多个取水节点触发移动浮船的取水控制,同时,针对该水进行在线检测,以输出水的成分表,基于不同的取水节点的水的成分表定义相对的水面的水质状态,从而实现了移动浮船对水面的在线检测,并在移动过程中实现动态检测,以定义相对的水面的水质状态,保证了水面的水质状态的实时检测。
2、为了解决上述技术问题,本发明实施例提供了一种基于移动浮船的在线检测方法,应用于基于移动浮船的在线检测场景;
3、所述基于移动浮船的在线检测方法,包括:
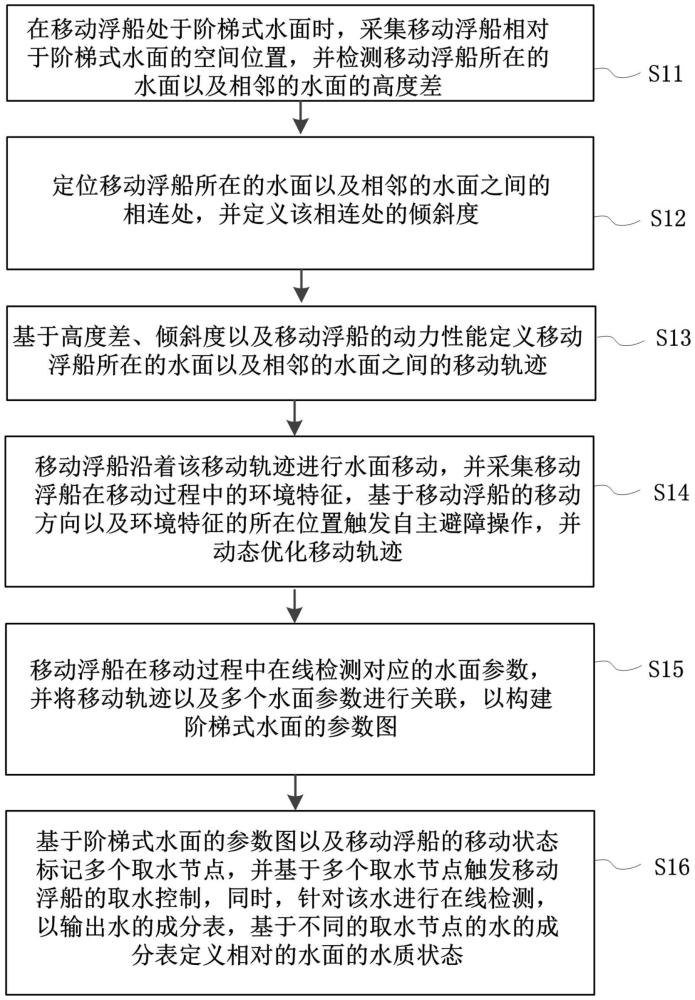
4、在移动浮船处于阶梯式水面时,采集移动浮船相对于阶梯式水面的空间位置,并检测移动浮船所在的水面以及相邻的水面的高度差;
5、定位移动浮船所在的水面以及相邻的水面之间的相连处,并定义该相连处的倾斜度;
6、基于高度差、倾斜度以及移动浮船的动力性能定义移动浮船所在的水面以及相邻的水面之间的移动轨迹;
7、移动浮船沿着该移动轨迹进行水面移动,并采集移动浮船在移动过程中的环境特征,基于移动浮船的移动方向以及环境特征的所在位置触发自主避障操作,并动态优化移动轨迹;
8、移动浮船在移动过程中在线检测对应的水面参数,并将移动轨迹以及多个水面参数进行关联,以构建阶梯式水面的参数图;
9、基于阶梯式水面的参数图以及移动浮船的移动状态标记多个取水节点,并基于多个取水节点触发移动浮船的取水控制,同时,针对该水进行在线检测,以输出水的成分表,基于不同的取水节点的水的成分表定义相对的水面的水质状态。
10、可选的,所述在移动浮船处于阶梯式水面时,采集移动浮船相对于阶梯式水面的空间位置,并检测移动浮船所在的水面以及相邻的水面的高度差,包括:
11、采集移动浮船所在位置,基于移动浮船所在位置以及地图体系定义移动浮船相对于阶梯式水面的位置状态;
12、在移动浮船处于阶梯式水面时,定义移动浮船的位置以及阶梯式水面的边缘位置;
13、根据移动浮船的位置以及阶梯式水面的边缘位置定义多个位置特征,多个位置特征沿着不同方向进行确定;
14、基于多个位置特征定义移动浮船相对于阶梯式水面的空间位置;
15、根据移动浮船相对于阶梯式水面的空间位置定义移动浮船所在的水面;
16、检测移动浮船所在的水面的水面高度,并根据该水面高度与相邻的水面的高度定义高度差。
17、可选的,所述定位移动浮船所在的水面以及相邻的水面之间的相连处,并定义该相连处的倾斜度,包括:
18、若高度差符合预设高度差阈值,则触发移动浮船所在的水面以及相邻的水面之间的相连处的检测;
19、在移动浮船所在的水面以及相邻的水面之间的相连处的检测中,采集移动浮船所在的水面的第一水面平面图;
20、基于第一水面平面图标记移动浮船所在的水面以及相邻的水面之间的相连处,并触发移动浮船的移动;
21、采集移动浮船与相连处之间的相对距离;
22、若移动浮船与相连处之间的相对距离符合预设相对距离阈值,则触发移动浮船对相连处的检测;
23、采集相连处的水流图片,并定义水流特征;
24、基于水流特征、相连处的水流速度、移动浮船所在位置的水流速度定义该相连处的倾斜度。
25、可选的,所述基于高度差、倾斜度以及移动浮船的动力性能定义移动浮船所在的水面以及相邻的水面之间的移动轨迹,包括:
26、定格高度差以及倾斜度;
27、将高度差、倾斜度以及移动浮船的动力性能进行关联,并基于高度差、倾斜度以及移动浮船的动力性能构建动力平衡关系;
28、在该动力平衡关系中,基于高度差、倾斜度以及移动浮船的动力性能构建倾斜式移动模型;
29、基于倾斜式移动模型以及相连处的立体模型定义多个移动轨迹线;
30、基于多个移动轨迹线以及移动浮船的移动速度范围确定最佳的移动轨迹,并定义为移动浮船所在的水面以及相邻的水面之间的移动轨迹。
31、可选的,所述移动浮船沿着该移动轨迹进行水面移动,并采集移动浮船在移动过程中的环境特征,基于移动浮船的移动方向以及环境特征的所在位置触发自主避障操作,并动态优化移动轨迹,包括:
32、移动浮船沿着该移动轨迹进行水面移动,并沿着移动轨迹定义动态检测区域;
33、将动态检测区域输入至移动浮船,基于动态检测区域以及移动浮船相对于相连处的位置定义随动检测区域;
34、实时遍历随动检测区域,并采集处于移动浮船周边的动态物体;
35、基于动态物体的流动速度、动态物体相对于移动浮船的朝向定义环境特征的所在位置;
36、基于环境特征的所在位置、移动浮船的移动方向以及移动浮船的移动速度确定偏移特征。
37、可选的,所述移动浮船沿着该移动轨迹进行水面移动,并采集移动浮船在移动过程中的环境特征,基于移动浮船的移动方向以及环境特征的所在位置触发自主避障操作,并动态优化移动轨迹,还包括:
38、根据偏移特征触发移动浮船的移动调整,此时,基于偏移特征触发自主避障操作,并动态优化移动轨迹;
39、采集移动浮船在相连处的多个姿态参数;
40、基于多个姿态参数确定移动浮船在相连处的移动姿态;
41、基于移动浮船在相连处的移动姿态、相连处的倾斜度以及相连处的水流速度触发对应的姿态调策略,并动态调控移动浮船的姿态,以保证了移动浮船在相连处的移动稳定性。
42、可选的,所述移动浮船在移动过程中在线检测对应的水面参数,并将移动轨迹以及多个水面参数进行关联,以构建阶梯式水面的参数图,包括:
43、移动浮船在移动过程中在线检测对应的水面参数,此时,移动浮船在移动过程中进行动态检测,定水面的检测效率,将水面的检测效率与移动浮船的移动速度进行匹配,并确定匹配系数,该匹配系数始终大于预设匹配系数阈值;
44、定格多个水面参数;
45、将移动轨迹以及多个水面参数进行关联;
46、基于移动轨迹中的各个节点标记对应的水面参数,以构建阶梯式水面的参数图;
47、在阶梯式水面的参数图中,基于多个水面参数进行排序;
48、对已排序的多个水面参数进行区间划分,以形成多个参数区间;
49、基于多个参数区间匹配对应的水面状态,并基于水面状态触发移动浮船的应急措施。
50、可选的,所述基于阶梯式水面的参数图以及移动浮船的移动状态标记多个取水节点,并基于多个取水节点触发移动浮船的取水控制,同时,针对该水进行在线检测,以输出水的成分表,基于不同的取水节点的水的成分表定义相对的水面的水质状态,包括:
51、定格阶梯式水面的参数图;关联阶梯式水面的参数图以及移动浮船的移动状态;
52、根据阶梯式水面的参数图以及移动浮船的移动状态标记多个取水节点,此时,在移动浮船的移动状态处于匀速状态时,触发移动浮船的取水策略,并标记对应的取水节点。
53、可选的,所述基于阶梯式水面的参数图以及移动浮船的移动状态标记多个取水节点,并基于多个取水节点触发移动浮船的取水控制,同时,针对该水进行在线检测,以输出水的成分表,基于不同的取水节点的水的成分表定义相对的水面的水质状态,还包括:
54、在各个取水节点中,采集移动浮船的取水位置、移动浮船的移动方向、移动浮船的移动速度;
55、基于移动浮船的取水位置、移动浮船的移动方向、移动浮船的移动速度定义取水控制模式,并根据取水控制模式触发移动浮船的取水控制;
56、对移动浮船对所取出的水进行在线检测,并输出多个水的基础参数;
57、根据多个水的基础参数构建水的成分表,以输出水的成分表;
58、定格各个取水节点,并匹配对应的水的成分表,以形成节点信息;
59、根据多个节点信息定义各个节点特征,并根据多个节点特征、多个节点特征所对应的位置的分布状态以及相对的水面的整体面积定义相对的水面的水质状态。
60、另外,本发明实施例还提供了一种基于移动浮船的在线检测系统,所述基于移动浮船的在线检测系统包括:
61、高度差模块,用于在移动浮船处于阶梯式水面时,采集移动浮船相对于阶梯式水面的空间位置,并检测移动浮船所在的水面以及相邻的水面的高度差;
62、倾斜度模块,用于定位移动浮船所在的水面以及相邻的水面之间的相连处,并定义该相连处的倾斜度;
63、移动轨迹模块,用于基于高度差、倾斜度以及移动浮船的动力性能定义移动浮船所在的水面以及相邻的水面之间的移动轨迹;
64、避障模块,用于移动浮船沿着该移动轨迹进行水面移动,并采集移动浮船在移动过程中的环境特征,基于移动浮船的移动方向以及环境特征的所在位置触发自主避障操作,并动态优化移动轨迹;
65、参数图模块,用于移动浮船在移动过程中在线检测对应的水面参数,并将移动轨迹以及多个水面参数进行关联,以构建阶梯式水面的参数图;
66、在线检测模块,用于基于阶梯式水面的参数图以及移动浮船的移动状态标记多个取水节点,并基于多个取水节点触发移动浮船的取水控制,同时,针对该水进行在线检测,以输出水的成分表,基于不同的取水节点的水的成分表定义相对的水面的水质状态。
67、在本发明实施例中,通过本发明实施例中的方法,在移动浮船处于阶梯式水面时,采集移动浮船相对于阶梯式水面的空间位置,并检测移动浮船所在的水面以及相邻的水面的高度差;定位移动浮船所在的水面以及相邻的水面之间的相连处,并定义该相连处的倾斜度;基于高度差、倾斜度以及移动浮船的动力性能定义移动浮船所在的水面以及相邻的水面之间的移动轨迹,从而把控移动浮船在多个水面的相连处的移动轨迹,并针对移动浮船在相连处的移动进行发自主避障操作,以动态优化移动轨迹,实现了移动浮船在阶梯式水面中的多个水面的移动,保证了移动浮船在跨越不同水面的移动稳定性,同时,移动浮船在移动过程中在线检测对应的水面参数,并将移动轨迹以及多个水面参数进行关联,以构建阶梯式水面的参数图;基于阶梯式水面的参数图以及移动浮船的移动状态标记多个取水节点,并基于多个取水节点触发移动浮船的取水控制,同时,针对该水进行在线检测,以输出水的成分表,基于不同的取水节点的水的成分表定义相对的水面的水质状态,从而实现了移动浮船对水面的在线检测,并在移动过程中实现动态检测,以定义相对的水面的水质状态,保证了水面的水质状态的实时检测。
- 还没有人留言评论。精彩留言会获得点赞!