本技术涉及医疗设备角度标定领域,具体而言,涉及一种提高示踪器角度测量精度的方法和系统。
背景技术:
1、角度测量技术在现代工业和科研领域中扮演着至关重要的角色。目前,市场上广泛使用的角度测量装置主要依赖于磁场原理或惯性原理进行工作。磁场原理的测量装置通常利用磁感应元件来检测物体相对于地球磁场的方位角,而惯性原理的测量装置则通过检测物体在空间中的加速度和角速度来确定其姿态。
2、然而,这些测量装置在实际应用中可能会遇到一些挑战。首先,单一的测量原理可能无法全面捕捉到所有影响角度测量的因素。例如,惯性测量装置在受到外部冲击或颠簸时,其内部的加速度计和陀螺仪可能会产生非线性响应,导致测量数据出现偏差,进而累积误差。这种误差在长时间或高精度的测量任务中尤为明显。
3、另一方面,磁场原理的测量装置对环境条件较为敏感。它们在强磁场或磁场变化较大的环境下工作时,可能会受到外部磁场的干扰,从而影响测量的准确性。例如,在靠近大型电磁设备或在地磁场异常区域,磁场测量装置的读数可能会产生显著偏差。
技术实现思路
1、为了解决上述技术问题,本技术提供一种提高示踪器角度测量精度的方法和系统,利用磁场原理和惯性原理两种不同的角度测量装置进行数据可靠度验证,使得测量得到的角度数据精度更高。
2、具体的,本技术的技术方案如下:
3、第一方面,本技术公开一种提高示踪器角度测量精度的方法,包括:
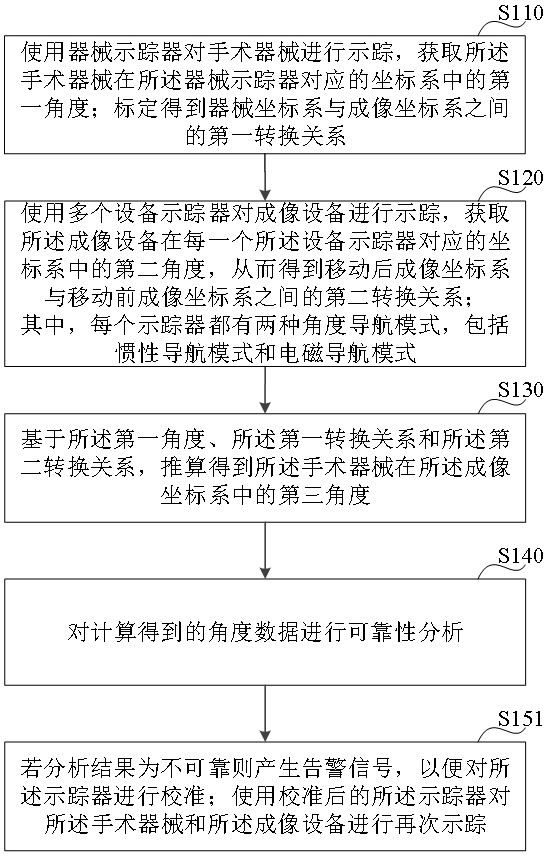
4、使用器械示踪器对手术器械进行示踪,获取所述手术器械在所述器械示踪器对应的坐标系中的第一角度;标定得到器械坐标系与成像坐标系之间的第一转换关系;
5、使用多个设备示踪器对成像设备进行示踪,获取所述成像设备在每一个所述设备示踪器对应的坐标系中的第二角度,从而得到移动后成像坐标系与移动前成像坐标系之间的第二转换关系;其中,每个示踪器都有两种角度导航模式,包括惯性导航模式和电磁导航模式;
6、基于所述第一角度、所述第一转换关系和所述第二转换关系,推算得到所述手术器械在所述成像坐标系中的第三角度;
7、对计算得到的角度数据进行可靠性分析;若分析结果为不可靠则产生告警信号,以便对所述设备示踪器进行校准;
8、使用校准后的所述示踪器对所述手术器械和所述成像设备进行再次示踪。
9、在一些实施方式中,所述角度数据为通过多个所述设备示踪器测量得到的多个所述第二角度组成的第二角度数据组。
10、在另一些实施方式中,所述角度数据为通过所述器械示踪器和多个所述设备示踪器的示踪结果计算得到的多个所述第三角度组成的第三角度数据组。
11、在一些实施方式中,所述的对计算得到的角度数据进行可靠性分析,具体包括:
12、计算所述角度数据的误差值,判断所述误差值是否超过预设误差;
13、若是则认为所述角度数据不可靠;若否则认为所述角度数据可靠。
14、在另一些实施方式中,所述的对计算得到的角度数据进行可靠性分析,具体包括:
15、构建概率置信度模型;
16、将所述角度数据输入所述概率置信度模型;使用knn算法,求得所述角度数据的最大聚类的中心点;以所述中心点为真值,求得所述角度数据的置信度;
17、判断所述置信度是否小于目标置信度;若是则认为所述角度数据不可靠;若否则认为所述角度数据可靠。
18、在另一些实施方式中,所述的对计算得到的角度数据进行可靠性分析,具体包括:
19、构建贝叶斯概率模型;
20、将所述角度数据输入所述贝叶斯概率模型;使用em算法求所述角度数据中的最大期望值;计算以所述最大期望值为中心的所述角度数据的置信度;
21、判断所述置信度是否小于目标置信度;若是则认为所述角度数据不可靠;若否则认为所述角度数据可靠。
22、第二方面,本技术还公开一种提高示踪器角度测量精度的系统,包括:
23、器械示踪模块,用于使用器械示踪器对手术器械进行示踪,获取所述手术器械在所述器械示踪器对应的坐标系中的第一角度;标定得到器械坐标系与成像坐标系之间的第一转换关系;
24、设备示踪模块,用于使用多个设备示踪器对成像设备进行示踪,获取所述成像设备在每一个所述设备示踪器对应的坐标系中的第二角度,从而得到移动后成像坐标系与移动前成像坐标系之间的第二转换关系;其中,每个示踪器都有两种角度导航模式,包括惯性导航模式和电磁导航模式;
25、角度推算模块,基于所述第一角度、所述第一转换关系和所述第二转换关系,推算得到所述手术器械在所述成像坐标系中的第三角度;
26、可靠性分析模块,用于对计算得到的角度数据进行可靠性分析;若分析结果为不可靠则产生告警信号,以便对所述设备示踪器进行校准;
27、所述设备示踪模块,还用于使用校准后的所述示踪器对所述手术器械和所述成像设备进行再次示踪。
28、在一些实施方式中,所述角度数据为通过多个所述设备示踪器测量得到的多个所述第二角度组成的第二角度数据组。
29、在另一些实施方式中,所述角度数据为通过所述器械示踪器和多个所述设备示踪器的示踪结果计算得到的多个所述第三角度组成的第三角度数据组。
30、在一些实施方式中,所述可靠性分析模块,还用于:计算所述角度数据的误差值,判断所述误差值是否超过预设误差;若是则认为所述角度数据不可靠;若否则认为所述角度数据可靠;
31、或,所述可靠性分析模块,还用于:构建概率置信度模型;将所述角度数据输入所述概率置信度模型;使用knn算法,求得所述角度数据的最大聚类的中心点;以所述中心点为真值,求得所述角度数据的置信度;判断所述置信度是否小于目标置信度;若是则认为所述角度数据不可靠;若否则认为所述角度数据可靠;
32、或,所述可靠性分析模块,还用于:构建贝叶斯概率模型;将所述角度数据输入所述贝叶斯概率模型;使用em算法求所述角度数据中的最大期望值;计算以所述最大期望值为中心的所述角度数据的置信度;判断所述置信度是否小于目标置信度;若是则认为所述角度数据不可靠;若否则认为所述角度数据可靠。
33、与现有技术相比,本技术至少具有以下一项有益效果:
34、本技术采用多个示踪器对成像设备进行示踪,其中每个示踪器都有两种角度导航模式,包括惯性导航模式和电磁导航模式。两种模式同时开启,以便这两种基于不同导航原理采集的数据可以相互验证,从而判断得到的角度数据是否可靠。以减少单一测量原理误差而产生的影响。
35、本技术通过误差值计算、构建统计学模型、构建置信度模型等方案,对示踪器获取的角度测量数据进行可靠度判断,本技术提供的可靠度判断方案由简至难可以根据实际使用的情况选择合适的可靠度判断方案。假设误差较大,则认为累计误差或者电磁干扰误差已经突破了阈值。需要重新校准惯性装置或排除由于外部装置产生的电磁影响后,重新进行角度测量,并以重新测量的角度数据作为可信的数据,这样便可以提高角度测量的准确率。