一种控制无人化移栽机路径的规划方法
本发明属于农机导航,涉及一种移栽机的控制方法,具体的说是涉及一种以提高无人化移栽机的作业效率和作业精度的路径规划方法。
背景技术:
1、无人化农机作业作为现代农业技术的重要组成部分,其优势在于提高土地利用率、作业质量和效率,同时降低人工成本和劳动强度。与传统人工操作相比,无人化农机的作业能够更精确地控制农机的行驶路径和作业模式,从而优化资源使用并减少人为失误。
2、在无人化农机作业中,路径规划算法起着关键作用。常用的路径规划算法包括任意曲线法、蚁群算法、粒子群算法、贪心算法和子区域分割法等。这些算法各有特点,但也存在一些共性的问题。任意曲线法能够灵活地处理复杂地形和不规则路径,但由于其路径规划过程中对曲线的建模和计算复杂度较高,可能会导致计算时间较长,并且在处理大规模地块时,算法效率可能会下降;蚁群算法通过模拟蚂蚁觅食行为来寻找最优路径,它具有较强的全局搜索能力,能够较好地处理复杂路径规划问题。然而,这种算法也容易陷入局部最优解,导致最终路径规划结果不够理想;粒子群算法模拟鸟群捕食行为来寻找最优解,其优点在于收敛速度较快,适用于动态和复杂的环境。然而,粒子群算法在处理高维和复杂路径时,可能存在重复率高和覆盖率低的问题;贪心算法通过每一步选择当前最优的局部解来寻找全局最优解。虽然算法简单且计算速度较快,但由于其过于注重局部最优解,容易忽视全局最优解,从而导致最终路径规划的效果不如预期;子区域分割法将作业区域分割成若干子区域,逐个进行路径规划,以减少计算复杂度并提高效率。尽管这种方法能有效降低计算负担,但在子区域之间的过渡和整合过程中,会出现路径重复和覆盖不足的问题。
技术实现思路
1、本发明的目的在于针对上述现有技术中存在的不足,提出一种控制无人化移栽机路径的规划方法,以提高无人化移栽机的作业效率和作业精度。
2、本技术提供的一种控制无人化移栽机路径的规划方法采用如下技术方案:
3、一种控制无人化移栽机路径的规划方法,其特征在于,所述方法步骤如下:
4、s1、根据无人化移栽机工作的农田环境,建立栅格地图并将其划分为若干个矩形区域;
5、s2、根据移栽机的工作的农田环境,选择群集智能优化算法的全覆盖路径规划算法并及建立评价指标;
6、s3、利用算法进行改进,求解无人化移栽机全局路径规划。
7、通过采用上述技术方案,解决了无人化移栽机的路径规划问题,提高了无人化移栽机工作时的准确性和稳定性。
8、进一步的,步骤s1中所述建立栅格地图的具体方法为:
9、(1)根据移栽机工作的农田环境,将农田作业区域的宽度设为m,长度设为n,此时农田作业区域的面积为s=mn;
10、(2)根据移栽机车身的尺寸大小将农田作业区域划分为大小相等的矩形区域,通过测量得到移栽机车身长度为a,宽度为b,因此划分的矩形区域长度为l=a,宽度为p=b,此农田作业区域的矩形栅格的个数为s/lp,其中农田作业区域在x轴上共有i=m/l个栅格,在y轴上有j=n/p个栅格;
11、(3)设定每个栅格中心的坐标为(x,y)并且对每个栅格赋予一个属性值;
12、
13、当(x,y)=0时,说明此矩形区域不存在障碍物,则移栽机可以进行工作,记此栅格为可工作栅格;当(x,y)=1时,说明此矩形区域存在障碍物,则移栽机不可进行工作,记此栅格为不可工作栅格,由于实际工作中,障碍物通常为不规则形状,因此需要对障碍物进行处理,将未占满一个栅格的障碍物视为占满一个栅格;最后对每个可作业栅格按顺序进行标记。
14、通过采用上述技术方案,获取了无人化移栽机工作环境的信息并进行处理,提高了无人化移栽机路径规划的运行速度。
15、进一步的,步骤s2中所述全覆盖路径规划的评价指标主要包括作业消耗成本和全覆盖路径重复率。
16、通过采用上述技术方案,设定了无人化移栽机路径规划的评价指标,提高了计算性能与计算准确性。
17、进一步的,所述作业消耗成本为无人化移栽机按照全覆盖路径规划行驶后的作业消耗成本,无人化移栽机在工作过程中主要的成本消耗为直线行驶消耗和转弯行驶消耗两部分;
18、直线行驶消耗与作业路径的长短成正比,距离越长,作业消耗成本就越高,直线行驶长度与消耗成本的关系公式如下:
19、
20、f=μg cosα+g sinα (3)
21、w1=f cosαs1 (4)
22、其中,ni为规划路径中的总的栅格数,imax=s/lp;μ为移栽机轮胎与地面的摩擦系数;w1为移栽机直线行驶消耗成本;
23、转弯行驶消耗主要与农机转弯次数有关,转弯次数越少,转弯成本消耗越小,根据转弯次数来计算转弯消耗成本,转弯次数和消耗成本的关系公式如下:
24、
25、w2=fs2n (6)
26、其中,s2为移栽机转弯行驶长度;w为移栽机工作宽度;w2为移栽机转弯行驶消耗成本;n为移栽机转弯次数;
27、所述全覆盖路径重复率为无人化移栽机在进行工作时,重复的工作面积与移栽机工作的总面积的百分比,全覆盖路径重复率计算公式如下:
28、
29、其中,η为全覆盖路径重复率,e(x,y)=0为移栽机工作总面积的栅格数,e(x,y)=1为移栽机重复工作面积的栅格数。
30、通过采用上述技术方案,解决了直线行驶消耗成本与转弯行驶消耗成本的计算问题,减少了无人化移栽机工作时的成本消耗;解决了全覆盖路径规划重复率的计算问题,提高了无人化移栽机的路径规划效果。
31、进一步的,所述步骤(3)中算法包括三个阶段:包围猎物、泡泡网捕食和搜索猎物。
32、通过采用上述技术方案,解决了无人化移栽机的路径规划算法问题,提高了无人化移栽机工作时的准确性。
33、进一步的,所述包围猎物阶段的计算公式如下:
34、
35、其中t是当前迭代次数,是当前得到的最优位置向量,而且会在变化迭代中不断更新,是当前位置向量,·代表向量之间的点乘,和代表系数向量,计算方式如下
36、
37、其中,是[0,1]之间的随机向量,在泡泡网捕食和随机搜索阶段的迭代过程中,从2线性下降到0,定义为:
38、a=2-2t/t (12)
39、其中,t为最大迭代次数。
40、通过采用上述技术方案,获取了系数向量提高了无人化移栽机路径规划算法的实时性。
41、进一步的,所述泡泡网捕食阶段的计算公式如下:
42、dk=|x*(t)-x(t)| (13)
43、x(t+1)=x*(t)+dk·ebi·cos2πi (14)
44、其中,dk为鲸鱼和猎物之间的欧式距离;b为对数螺旋形状常数;i为[-1,1]之间的随机数;此过程中鲸鱼通过(0,1)之间的概率p决定是以螺旋曲线游向猎物还是收缩包围圈。
45、通过采用上述技术方案,获取了鲸鱼和猎物之间的欧式距离dk,通过概率p决定是以螺旋曲线游向猎物还是收缩包围圈。
46、进一步的,所述搜索猎物阶段的计算公式如下:
47、dr=|c·xrand-x(t)| (15)
48、x(t+1)=xrand+a·dr (16)
49、其中,xrand为随机选择的鲸鱼位置,在迭代过程中a的值从2到0线性下降;a为[-a,a]内的随机值,当|a|<1时鲸鱼的下一位置可以是其现在位置和猎物位置之间的任意位置,当|a|>1时,鲸鱼向猎物发起攻击。
50、通过采用上述技术方案,获取了鲸鱼下一位置的状态,从而得到无人化移栽机下一个位置状态。
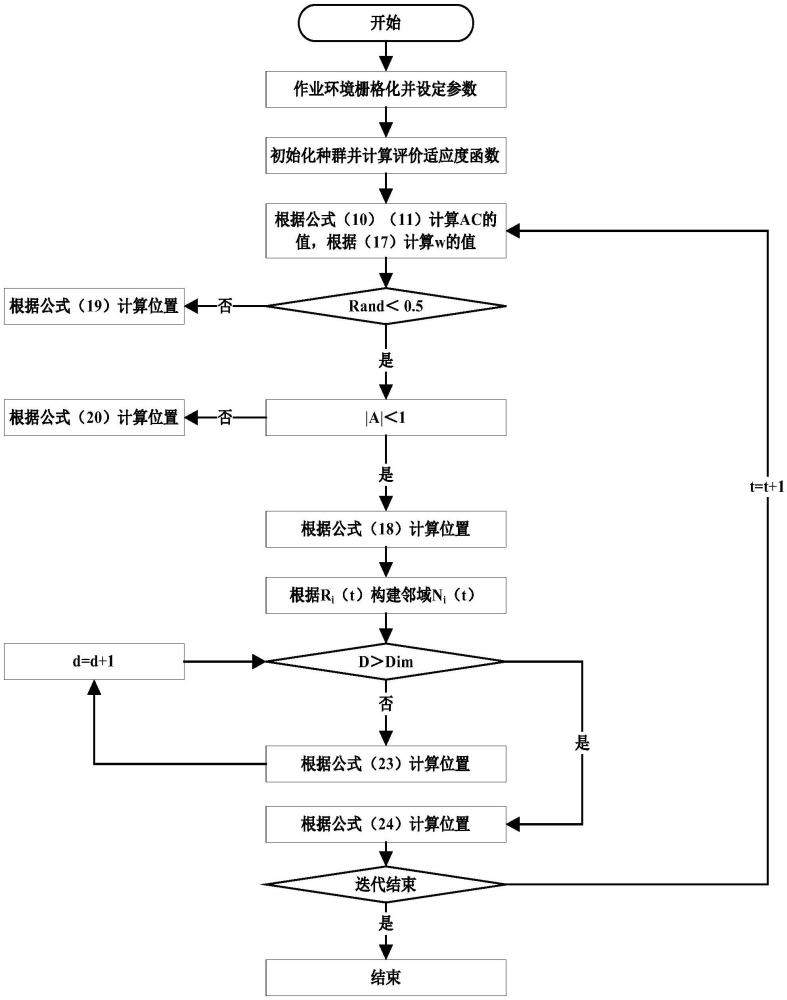
51、进一步的,步骤s3中所述算法为引入自适应权重系数ω,自适应权重系数ω的计算公式如下:
52、
53、其中,t为当前迭代次数,itmax为最大迭代次数;
54、将自适应权重系数ω引入公式(9)、公式(14)、和公式(16),得到新的公式如下:
55、
56、x(t+1)=ω·x*(t)+dk·ebi·cos2πi (19)
57、x(t+1)=ω·xrand+a·dr (20)
58、其中,自适应权重系数ω随着t的增加在[0,2]之间变化,变化后的公式相比于之前的能够提高搜索速度与搜索精度。
59、通过采用上述技术方案,引入自适应权重系数ω,提高了搜索速度与搜索精度。
60、进一步的,步骤(3)中所述算法为采用基于维度的领域搜索策略,公式如下:
61、ri(t)=|xi(t)-xi-woa(t+1)|(21)
62、其中,xi-woa(t+1)为标准鲸鱼优化算法计算得出的位置,ri(t)为每只鲸鱼当前位置xi(t)与下一时刻位置xi-woa(t+1)的欧式距离;
63、ni(t)={xi(t)|di(xi(t),xj(t))≤ri(t),xi(t)∈pop}(22)
64、其中,ni(t)为以ri(t)为半径的圆,记为xi(t),di(t)为xi(t)和xj(t)的欧式距离;
65、
66、根据和计算得出鲸鱼下一位置
67、
68、其中,xi-dwoa(t+1)为通过比较f(xi-woa)和的大小得到的下一时刻无人化移栽机的位置。
69、通过采用上述技术方案,得出了通过优化鲸鱼算法后的无人化移栽机位置,提高了无人化移栽机工作时的准确性。
70、综上所述,本发明包括以下至少一种有益技术效果:
71、(1)本发明能够实现对农田作业环境的全覆盖,保证了无人化移栽机作业的完整性。(2)本发明局部搜索能力强,能够迅速找到最优解,并且提高了收敛速度,缩短了运行时间,提高了效率。
- 还没有人留言评论。精彩留言会获得点赞!