一种静态接收机GNSS导航信号捕获方法及装置与流程
本发明涉及导航接收机领域,具体涉及一种静态接收机gnss导航信号捕获方法及装置。
背景技术:
1、现有的全球导航卫星系统(gnss)信号接收机捕获灵敏度一般低于跟踪灵敏度。当接收机周围情况良好时,接收机可以通过本地伪码和接收信号的相关操作捕获到信号峰值,如图1,但如果存在干扰信号,如图2,则可能无法正确捕获信号,进而无法完成跟踪和定位解算的任务。
2、在授时型接收机应用场景中,有相当一部分接收机位置固定,传统捕获方法在这些应用场景时,没有利用接收机静止(位置已知)的先验信息。传统接收机在捕获时是对不同卫星信号分别进行捕获,捕获灵敏度较低。
技术实现思路
1、基于上述现状,本发明的主要目的在于提供一种捕获灵敏度高、捕获概率大的静态接收机gnss导航信号捕获方法。
2、为实现上述目的,本发明采用的技术方案如下:
3、一种静态接收机gnss导航信号捕获方法,所述方法包括步骤:
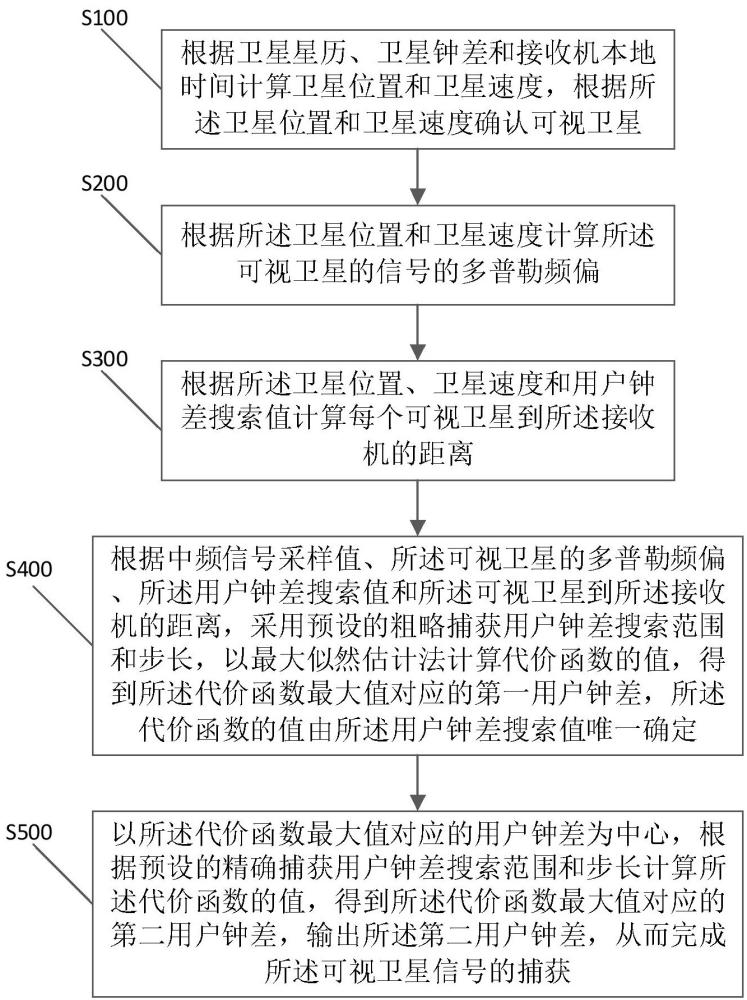
4、s100:根据卫星星历、卫星钟差和接收机本地时间计算卫星位置和卫星速度,根据所述卫星位置和卫星速度确认可视卫星;
5、s200:根据所述卫星位置和卫星速度计算所述可视卫星的信号的多普勒频偏;
6、s300:根据所述卫星位置、卫星速度和用户钟差搜索值计算每个可视卫星到所述接收机的距离;
7、s400:根据中频信号采样值、所述可视卫星的多普勒频偏、所述用户钟差搜索值和所述可视卫星到所述接收机的距离,采用预设的粗略捕获用户钟差搜索范围和步长,以最大似然估计法计算代价函数的值,得到所述代价函数最大值对应的第一用户钟差,所述代价函数的值由所述用户钟差搜索值唯一确定;
8、s500:以所述代价函数最大值对应的用户钟差为中心,根据预设的精确捕获用户钟差搜索范围和步长计算所述代价函数的值,得到所述代价函数最大值对应的第二用户钟差,输出所述第二用户钟差,从而完成所述可视卫星信号的捕获。
9、优选地,所述步骤s100包括:
10、s101:根据卫星初始传输时延计算卫星的信号发射时间;
11、s102:根据所述信号发射时间和所述卫星星历计算卫星位置和卫星速度;
12、s103:根据所述卫星位置和所述接收机位置计算卫星实际传输时延;
13、s104:根据所述卫星实际传输时延和所述卫星初始传输时延计算传输距离的绝对差值,如果所述绝对差值大于预设值,则所述卫星初始传输时延更新为所述卫星实际传输时延;
14、s105:重复上述步骤,直至所有卫星的传输距离的绝对差值均小于所述预设值时,根据所述卫星位置和所述接收机位置计算卫星相对于用户的俯仰角,保留所述俯仰角大于预设角度的卫星作为所述可视卫星。
15、优选地,所述用户钟差搜索值为在预设的用户钟差搜索范围内,按照预设步长输出的一系列用户钟差搜索值。
16、优选地,所述步骤s300采用如下方法计算每个可视卫星到所述接收机的距离:
17、,
18、其中,为卫星位置,为用户位置, c为光速, tu为所述用户钟差搜索值,是第 i个卫星信号的钟差值。
19、优选地,所述步骤s400和s500中的代价函数为:
20、,
21、其中,分别为组成的矢量,为所述可视卫星到接收机的距离,为所述可视卫星的多普勒频偏, m为所述可视卫星的数量,为所述中频信号采样值;
22、为 k * m维的矩阵, k为中频采样信号的长度, tu为所述用户钟差搜索值,所述矩阵 g的第 k行,第 i列元素为:
23、 ,
24、 ci为卫星伪码采样值, ts为采样间隔。
25、优选地,所述预设的粗略捕获用户钟差搜索范围是-500us~500us,步长为1us。
26、优选地,所述预设的精确捕获用户钟差搜索范围为-1us~1us,步长为1ns。
27、优选地,当所述接收机采用传统捕获方法无法捕获至少4颗卫星导航信号时,则采用所述方法执行gnss导航信号的捕获,否则,采用所述传统捕获方法执行gnss导航信号的捕获。
28、本发明还公开一种计算机存储介质,所述存储介质存储有程序,其中,所述程序用于被执行实现本发明所述的静态接收机gnss导航信号捕获方法。
29、本发明还公开一种静态接收机gnss导航信号捕获装置,所述装置包括步骤可视卫星确定模块、多普勒频偏计算模块、距离计算模块、粗捕模块和精捕模块,
30、所述可视卫星确定模块用于根据卫星星历、卫星钟差和接收机本地时间计算卫星位置和卫星速度,根据所述卫星位置和卫星速度确认可视卫星;
31、所述多普勒频偏计算模块用于根据所述卫星位置和卫星速度计算所述可视卫星的信号的多普勒频偏;
32、所述距离计算模块用于根据所述卫星位置、卫星速度和用户钟差搜索值计算每个可视卫星到所述接收机的距离;
33、所述粗捕模块用于根据中频信号采样值、所述可视卫星的多普勒频偏、所述用户钟差搜索值和所述可视卫星到所述接收机的距离,采用预设的粗略捕获用户钟差搜索范围和步长,以最大似然估计法计算代价函数的值,得到所述代价函数最大值对应的第一用户钟差,所述代价函数的值由所述用户钟差搜索值唯一确定;
34、所述精捕模块用于以所述代价函数最大值对应的用户钟差为中心,根据预设的精确捕获用户钟差搜索范围和步长计算所述代价函数的值,得到所述代价函数最大值对应的第二用户钟差,输出所述第二用户钟差,从而完成所述可视卫星信号的捕获。
35、优选地,所述可视卫星确定模块包括卫星信号发射时间计算单元、卫星位置速度计算单元、传输时延计算单元、传输时延更新单元和可视卫星确定单元,
36、所述卫星信号发射时间计算单元用于根据卫星初始传输时延计算卫星的信号发射时间;
37、所述卫星位置速度计算单元用于根据所述信号发射时间和所述卫星星历计算卫星位置和卫星速度;
38、所述传输时延计算单元用于根据所述卫星位置和所述接收机位置计算卫星实际传输时延;
39、所述传输时延更新单元用于根据所述卫星实际传输时延和所述卫星初始传输时延计算传输距离的绝对差值,如果所述绝对差值大于预设值,则所述卫星初始传输时延更新为所述卫星实际传输时延,重复上述步骤,直至所有卫星的传输距离的绝对差值均小于所述预设值;
40、所述可视卫星确定单元用于在所有卫星的传输距离的绝对差值均小于所述预设值时,根据所述卫星位置和所述接收机位置计算卫星相对于用户的俯仰角,保留所述俯仰角大于预设角度的卫星作为所述可视卫星。
41、优选地,所述用户钟差搜索值为在预设的用户钟差搜索范围内,按照预设步长输出的一系列用户钟差搜索值。
42、优选地,所述距离计算模块采用如下方法计算每个可视卫星到所述接收机的距离:
43、,
44、其中,为卫星位置,为用户位置, c为光速, tu为所述用户钟差搜索值,是第 i个卫星信号的钟差值。
45、优选地,所述粗捕模块和精捕模块中的代价函数为:
46、,
47、其中,分别为组成的矢量,为所述可视卫星到接收机的距离,为所述可视卫星的多普勒频偏, m为所述可视卫星的数量,为所述中频信号采样值;
48、为 k * m维的矩阵, k为中频采样信号的长度, tu为所述用户钟差搜索值,所述矩阵 g的第 k行,第 i列元素为:
49、 ,
50、 ci为卫星伪码采样值, ts为采样间隔。
51、优选地,所述预设的粗略捕获用户钟差搜索范围是-500us~500us,步长为1us。
52、优选地,所述预设的精确捕获用户钟差搜索范围为-1us~1us,步长为1ns。
53、优选地,还包括传统捕获模块,当所述接收机采用传统捕获模块执行gnss导航信号的捕获,且无法捕获至少4颗卫星导航信号时,采用所述可视卫星确定模块、多普勒频偏计算模块、距离计算模块、粗捕模块和精捕模块执行gnss导航信号的捕获,否则,采用所述传统捕获模块执行gnss导航信号的捕获。
54、本发明还公开一种gnss导航接收机芯片,所述芯片包括本发明所述的静态接收机gnss导航信号捕获装置,以进行gnss导航信号的捕获。
55、本发明还公开一种gnss导航接收机,采用本发明所述的gnss导航接收机芯片。
56、本发明利用卫星星历、卫星钟差、静态接收机位置等先验信息,根据最大似然估计方法,对所有可视信号进行统一处理,即进行多信号联合处理,将最大似然估计代价函数表示为以用户钟差为自变量的函数,通过在用户钟差这一个维度进行搜索并最大化代价函数,即可获得用户钟差的最大似然估计结果,相比传统捕获方法,可以获得更高的捕获灵敏度,提高捕获概率,进而恢复授时结果。
57、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
- 还没有人留言评论。精彩留言会获得点赞!