一种变电站站内物体定位方法、系统、设备和介质与流程
【】本发明涉及变电站内实体物体点云数据处理,尤其涉及一种变电站站内物体定位方法、系统、设备和介质。
背景技术
0、
背景技术:
1、随着北斗地基增强平台的逐步建成,在变电站作业人员和车辆上布置北斗定位标签,可实现厘米级的定位精度,在电网运检业务中应用前景广阔。实时定位需要结合准确的等比例三维变电站模型,才能实现智能作业安全管控。但目前都需要人工到现场测量来创建三维模型,一方面由于测量误差,导致站内设备在模型中的位置与实际不符,另一方面手工建模周期长、成本高,变电站内进行基建或设备更换后,三维模型难以及时更新,使得依赖准确位置信息的作业安全管控很难实际应用。作为电力作业三维安全管控系统的前端,三维模型的精确性和轻量化非常重要,是作业三维安全管控系统大规模应用推广的基础。
2、因此,有必要研究一种变电站站内物体定位方法、系统、设备和介质来应对现有技术的不足,以解决或减轻上述一个或多个问题。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明提供了一种变电站站内物体定位方法、系统、设备和介质,摒弃了原有的人工贴片拼接建模方式,轻量级三维点云建模在无人机和推车多个激光扫描设备采集现场数据后,根据对电力设备的关注度,自动优化生成关键部件的一体点云模型,可以快速生成作业区域完整的模型数据,对变电站内增加新的设备、临时施工、经常出现设备变化的场景适应程度更高。
2、一方面,本发明提供一种变电站站内物体定位方法,所述物体定位方法包括
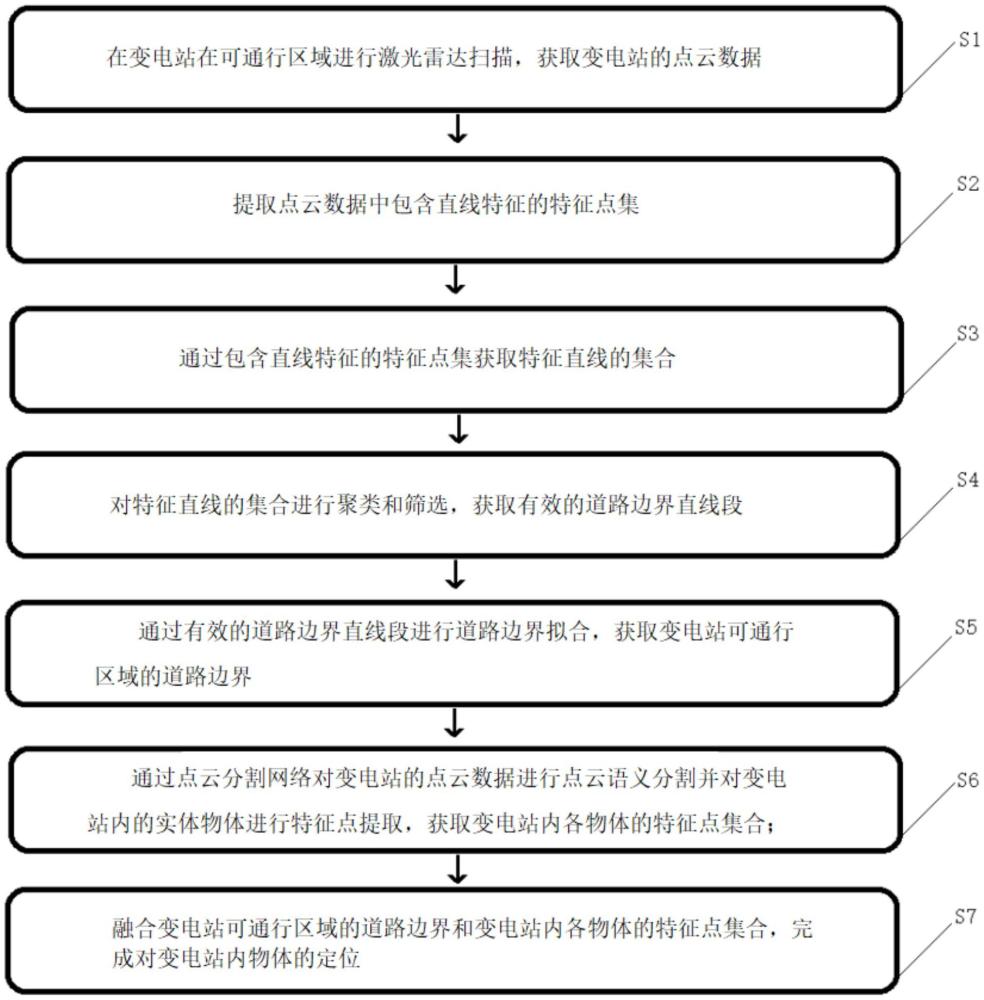
3、s1,在变电站在可通行区域进行激光雷达扫描,获取变电站的点云数据;
4、s2,提取点云数据中包含直线特征的特征点集;
5、s3,通过包含直线特征的特征点集获取特征直线的集合,
6、s4,对特征直线的集合进行聚类和筛选,获取有效的道路边界直线段;
7、s5,通过有效的道路边界直线段进行道路边界拟合,获取变电站可通行区域的道路边界;
8、s6,通过点云分割网络对变电站的点云数据进行点云语义分割并对变电站内的实体物体进行特征点提取,获取变电站内各物体的特征点集合;
9、s7,融合变电站可通行区域的道路边界和变电站内各物体的特征点集合,完成对变电站内物体的定位。
10、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s2具体包括:
11、以激光雷达的每条扫描线为横向索引,将同一条扫描线上的连续三个点满足预设约束的点作为横向候选特征点集;
12、以激光雷达相邻扫描线的之间的径向角度变化为约束条件,获取径向候选特征点集;
13、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s2中横向候选特征点集获取过程中预设的约束具体为:
14、将连续的三个点替换为相互间隔为d的三个点,将点云投影到xoy平面,利用三个点的角度关系建立约束条件进行特征点的提取;
15、同一条扫描线上l的三个点分别为pl,i-d,pl,i,pl,i+d,坐标分别为(xl,i-d,yl,i-d),(xl,i,yl,i),(xl,i+d,yl,i+d)每相邻的两点可以确定一条向量,定义αi,j作为向量角来描述三个点的位置关系如下:
16、
17、在路面等平坦条件下,αi,j值很小,接近0°,在道路边界处,αi,j接近90°,选取阈值αth=30°,d=5,保留在[pl,i-d,pl,i+d]区间内,系数αl,k最大的一个点pl,k作为特征点,i-d≤k≤i+d,通过遍历每条扫描线,构建横向候选特征点集。
18、所述s2中径向角度变化的约束条件具体为:
19、预设pl-1,i,pl,i是位于相邻的扫描线上两点,且具有相同的方位角,坐标分别为(xl-1,i,yl-1,i,zl-1,i),(xl,i,yl,i,zl,i),设两点的径向角度为
20、取βth=20°,当pl,i位于道路边界时,与平坦路面相比,相邻扫描线之间的径向角度产生变化,如果则认为pl,i是一个符合条件的特征点,每一组径向数据,仅由内而外地提取第一个符合约束条件的点作为特征点,遍历每一组径向数据,构建径向候选特征点集。
21、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s3中具体包括:
22、s31:横向候选特征点集以每条扫描线为单位,将任意相邻的两个特征点分别作为首尾端点定义一段离散曲线,对于每段离散曲线执行预设约束方法,保留满足约束条件的横向特征直线集合;
23、s32:径向候选特征点集先进行离散化处理,再以每条径向线为单位,将任意相邻的两个特征点分别作为首尾端点定义一段离散曲线,对于每段离散曲线执行预设约束方法,保留满足约束条件的径向特征直线集合;
24、s33:融合汇总横向特征直线集合和径向特征直线集合,获取特征直线的集合。
25、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s4中聚类和筛选的方法通过k-means聚类、横向分析与纵向分析和基于ransac的筛选的方式实现直线段的分类,有选择地保留特征直线段作为有效的道路边界直线段。
26、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s5中道路边界拟合过程通过三次b样条插值拟合道路边界,并通过簇间边界平滑处理对插值拟合后道路边界进行优化,获取变电站可通行区域的道路边界。
27、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述s6中语义分割过程具体包括:
28、s61:通过平滑的阈值作为分割条件对点云数据的分割过程进行限制,进行改进的欧式聚类分割;
29、s62:对聚类分割后的结果进行缺失优化、特征位置编码、网络学习和归一化处理。
30、如上所述的方面和任一可能的实现方式,进一步提供一种变电站站内物体定位系统,所述物体定位系统包括如下模块:
31、点云数据获取模块,用于在变电站在可通行区域进行激光雷达扫描,获取变电站的点云数据;
32、特征点集提取模块,用于提取点云数据中包含直线特征的特征点集;
33、特征直线集合获取模块,通过包含直线特征的特征点集获取特征直线的集合,
34、有效的道路边界直线段获取模块,用于对特征直线的集合进行聚类和筛选,获取有效的道路边界直线段;
35、道路边界拟合模块,用于通过有效的道路边界直线段进行道路边界拟合,获取变电站可通行区域的道路边界;
36、物体特征点获取模块,用于通过点云分割网络对变电站的点云数据进行点云语义分割并对变电站内的实体物体进行特征点提取,获取变电站内各物体的特征点集合;
37、物体定位模块,用于融合变电站可通行区域的道路边界和变电站内各物体的特征点集合,完成对变电站内物体的定位。
38、如上所述的方面和任一可能的实现方式,进一步提供一种电子设备,包括存储器和处理器;存储器,用于存储计算机程序;处理器,用于执行所述计算机程序,所述计算机程序被处理器执行时实现所述的一种变电站站内物体定位方法的步骤。
39、如上所述的方面和任一可能的实现方式,进一步提供一种计算机可读存储介质,所述存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现所述的一种变电站站内物体定位方法的步骤。
40、与现有技术相比,本发明可以获得包括以下技术效果:
41、本发明通过无人机载或地面小车载激光雷达对站内和输电线路进行测绘扫描,软件可处理点云数据后自动生成适应于作业安全管控的轻量级点云模型,从而大大提高变电站模型的位置精度和更新频率,提高作业安全管控的可用性。
42、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有技术效果。
- 还没有人留言评论。精彩留言会获得点赞!