瞬变电磁探测系统的制作方法
本发明涉及电磁探测领域,具体地说,是一种瞬变电磁探测系统。
背景技术:
1、瞬变电磁探测的基本原理是在发射线圈中施加脉冲电流,产生瞬变电磁场,进而在地质介质中引起二次感应涡流场。在一次脉冲的间隙期间,通过接收线圈记录感应电压的变化情况,测量二次感应涡流场的衰减,从而获取地下地质信息。
2、在实际应用中,发射线圈和接收线圈之间存在较强的耦合关系,接收线圈上会产生较大的感应电压,覆盖携带有效地质信息的二次场信号。尤其是在发射电流关断期间,信号混叠会引起关断早期信号的畸变,严重影响浅层探测效果。
3、传统补偿方法通过调整接收线圈和发射线圈结构,来减弱这种耦合关系,常见的补偿方法包括申请号为cn112731539和cn112666613a的共面消耦,申请号为cn217158614u和cn216209949u的共轴消耦和申请号为cn112130214a的偏心消耦。上述补偿方法都受接收线圈与发射线圈的自身形状、线圈匝数以及线圈之间相对位置关系的严格制约,而线圈形状和线圈之间相对位置关系在运输、运动及气候冷热变化中易发生变化,导致补偿效果变差,严重影响最终的探测精度,需要重新调整补偿才能投入正常使用。
4、当需要以重新调整补偿时,上述传统补偿方法只能通过调整线圈间相对位置关系、或者线圈形状、或者线圈匝数的方式来重新实现有效的补偿效果,无法对补偿电流进行单独调节,因此无法在不中断探测作业的前提下,无法实时通过软件参数设置来修正补偿;同时上述传统补偿方法由于基本原理的限制,补偿机构依赖于瞬变电磁探测系统本身的特殊线圈结构,无法独立于瞬变电磁探测系统之外,从而无法用于补偿其他线圈结构类型的瞬变电磁探测系统,不具备通用性;
5、探测施工现场缺乏调试设备及复杂的作业环境等客观因素也使得调整更加困难,特别是在小回线瞬变电磁探测和航空瞬变电磁探测中:小回线瞬变电磁探测经常面对的是一些崎岖不平的工况,在探测过程中无法避免磕碰,这将改变线圈的形状,或者发射线圈和接受线圈之间出现相对位移,若无法在现场修正补偿,将严重影响探测精度;航空瞬变电磁探测的飞行高度可能高达数千米,在飞行作业过程中会出现因强横风导致线圈形变或者发射线圈和接收线圈之间出现相对位移,而传统补偿方法在单个飞行架次中途无法重修正补偿,从而严重影响该飞行架次的探测精度。因此,针对瞬变电磁探测,亟需一种简单高效并能在补偿效果变差时,及时修正补偿的瞬变电磁探测系统。
技术实现思路
1、为达上述目的,本发明提供一种瞬变电磁探测系统,可以有效抵消发射线圈对接收线圈的影响,当各线圈之间相对位置发生改变,或者线圈形变,可以根据实际的补偿情况来电控调节补偿电流,避免了重新绕制线圈或者调节发射线圈和接收线圈结构的繁琐工作,极大提高施工效率,同时补偿机构可以适配不同类型的瞬变电磁系统。
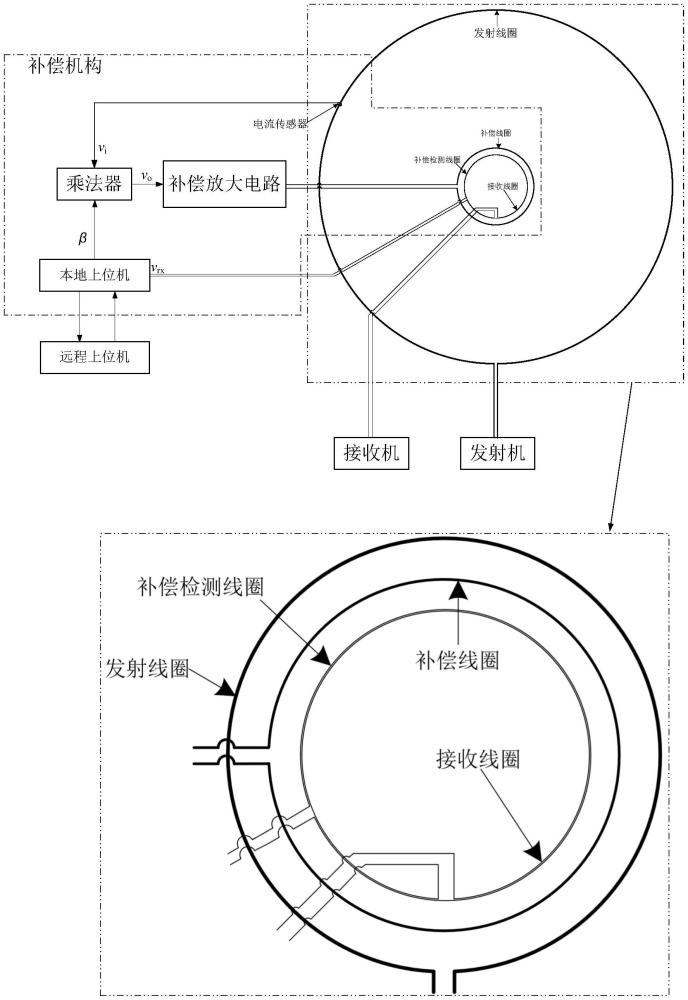
2、瞬变电磁探测系统的技术方案为:包括发射线圈、发射机、接收线圈和接收机,接收线圈与接收机相连,发射线圈与发射机相连,其关键在于:还包括补偿机构,补偿机构包括电流传感器、补偿检测线圈、补偿线圈和补偿电路;
3、电流传感器用于:检测发射线圈的电流,并输出发射电流信号vi给补偿电路;
4、补偿检测线圈用于:检测穿过接收线圈的所有磁通量φ0,并输出感应电压信号vrx给补偿电路;该磁通量φ0包括发射磁通量φ1、补偿磁通量φ2和地质响应磁通量φ3;
5、补偿电路用于:根据发射电流信号vi和感应电压信号vrx输出补偿电流;
6、补偿线圈用于:根据补偿电流形成补偿磁通量φ2,补偿磁通量φ2与发射磁通量φ1大小相等,方向相反。
7、发射机正常发射正负交替的发射电流,补偿机构通过电流传感器检测发射线圈的电流,从而可以保证补偿电流与发射电流的波形同步,再通过补偿检测线圈检测接收线圈的位置处的实际的补偿情况,进而对补偿电流的幅值进行调节,使得补偿磁场实时且完全抵消发射磁场对接收线圈的干扰。
8、利用补偿线圈发射的补偿磁通去抵消局部的发射磁通,得到一个发射磁通完全被抵消的局部区域,若接收线圈在该局部区域内,通过调节补偿电流可以抵消发射磁通干扰,因而不需要对发射线圈和接收线圈的相对位置作限制;
9、当发射线圈和接收线圈相对位置发生改变时,以及发射线圈或接收线圈发生形变时,只需根据实际的补偿情况调节补偿电流,即可实现校正,避免了重新绕制线圈或者调节发射线圈和接收线圈结构的繁琐工作,极大提高施工效率。
10、更进一步,补偿检测线圈为感应线圈,该感应线圈与接收线圈的大小和形状一致,且二者紧密贴合。
11、补偿检测线圈为独立的感应线圈,使得补偿机构与发射线圈、发射机、接收线圈和接收机没有直接的结构连接,使得补偿机构作为一个单独的补偿系统,可以适用于不同的发射线圈、发射机、接收线圈和接收机,其通用性更好;感应线圈与接收线圈的大小和形状一致且紧密叠合,使得其检测的磁通更加接近真实接收线圈的磁通,进而提高补偿的精度。
12、更进一步,补偿检测线圈和接收线圈为同一个感应线圈,该感应线圈连接接收机,该感应线圈还连接补偿电路;
13、或者补偿检测线圈和接收线圈为同一个感应线圈,该感应线圈连接接收机,接收机还与补偿电路通信。
14、接收线圈为补偿检测线圈,减少了补偿检测线圈的绕制与固定,节约了硬件成本,同时在接收线圈设置活动检测点或补偿机构与接收机通讯获取接收线圈的感应电压。
15、补偿机构同样可以作为一个独立的补偿系统对其他不同类型的瞬变电磁探测系统进行补偿,具体的操作方法是:先获取所需补偿的瞬变电磁探测系统的接收线圈感应电压或者加装补偿检测线圈,将电流传感器安装于所需补偿的瞬变电磁探测系统的发射线圈,最后根据接收线圈感应电压或者补偿检测线圈电压来调节补偿电流的幅值。
16、更进一步,补偿电路包括系数设置电路、乘法器和补偿放大电路;
17、系数设置电路获取感应电压信号vrx,输出校正系数信号β;
18、乘法器的第一输入端获取发射电流信号vi,乘法器的第二输入端获取校正系数信号β,乘法器的输出端输出乘积信号vo给补偿放大电路,补偿放大电路的输出端连接补偿线圈。
19、乘法器的第一输入端输入发射线圈的电流值,使得补偿线圈的电流始终跟随发射线圈的电流;乘法器的第二输入端输入校正系数信号β,当发射线圈和接收线圈的实际相对位置发生变化及发生线圈形变,系数设置电路依据补偿检测线圈的输出信号通过手动或自动方式设置该校正系数信号β,使得补偿磁场能实时且完全抵消发射磁场对接收线圈的影响。
20、更进一步,乘法器包括电阻rb和可调电阻ra,电阻rb的前端作为乘法器的第一输入端,可调电阻ra的阻值控制端作为乘法器的第二输入端,电阻rb的后端连接可调电阻ra的前端,可调电阻ra的后端连接参考地,电阻rb和可调电阻ra的公共端作为乘法器的输出端。
21、乘法器的输入输出关系为:
22、vo=vi×β
23、β=rb/(ra+rb)
24、其中vo为乘法器的输出信号,即补偿放大电路的输入信号;vi为乘法器第一输入端的输入信号,即电流传感器的信号输出,β为校正系数;
25、根据β的计算公式可以保证β不为零,从而保证补偿电流跟随发射电流。
26、更进一步,系数设置电路或者为自主补偿电路,该自主补偿电路包括补偿反馈电路,补偿反馈电路包括减法器、参考电压源、pi调节器和限幅器,补偿检测线圈连接减法器的输入负端,减法器的输入正端连接参考电压源的输出端,减法器的输出端输出差值信号e(k)给pi调节器,pi调节器的输出端连接限幅器的输入端,限幅器的输出信号为校正系数信号β;
27、系数设置电路或者为手动补偿电路,该手动补偿电路包括本地上位机,该本地上位机连接有人机交互装置,本地上位机获取感应电压信号vrx的波形;
28、当波形的初次峰值点电压为正电压时,通过人机交互装置提高校正系数信号β的值,当波形的初次峰值点电压为负电压时,通过人机交互装置降低校正系数信号β的值。
29、通过减法器求得参考电压源与补偿检测线圈的输出信号差值,将该差值输入pi调节器,pi调节器的输出信号经过限幅器、乘法器的第二输入端、补偿放大电路后,控制补偿电流作用于补偿线圈,补偿线圈产生补偿磁通抵消在接收线圈位置处的发射磁通,由此实现自动闭环控制,当发射线圈和接收线圈的实际相对位置发生变化及发生线圈形变,实现校正系数信号β的自动设置,不需要人为参与分析及进行手动设置。
30、采用常见的pi调节器,可以很容易使用硬件电路实现,调节速度快、准确性高、稳定性好,便于整个补偿电路使用全硬件电路实现,保证了补偿调节的处理运算速度,同时可以保证稳态误差较小;通过限幅器可以限制乘法器的第二输入端的信号在一个合理范围内。
31、通过人机交互装置对校正系数信号β进行手动设置和修正,实现通过设置软件参数来修正补偿的功能。
32、更进一步,乘法器的第二输入端连接限幅器,乘法器的第二输入端还连接本地上位机,该本地上位机的优先级大于限幅器的优先级。
33、可以根据实际需求,既可以手动调节校正系数信号β,也可以自动调节校正系数信号β,适用性更强。
34、更进一步,本地上位机、补偿机构、发射机、发射线圈、接收机和接收线圈安装在无人机上,其中本地上位机与包括远程上位机无线通信,远程上位机接收本地上位机发送的感应电压信号vrx;
35、人机交互装置设置在远程上位机上。
36、以无人机为平台,通过远程上位机进行控制,在实际使用过程中如果线圈大小、形状相对位置发生变化,只需要通过上位机调节补偿电流的幅值,即可重新校正补偿,方便快捷,不需要重新调节线圈尺寸、位置或匝数;同时当无人机飞至千米高空进行补偿校正时,千米高空相当于没有地质响应的空间,补偿校正效果更好,也更加方便,避免了传统在没有地质响应的暗室中进行补偿校正的繁琐流程。
37、更进一步,补偿电路还包括使能信号发生器、第一使能器和第二使能器;
38、使能信号发生器的第一输入端获取发射电流信号vi,使能信号发生器的第二输入端获取使能参考电压,使能信号发生器的输出端连接第一使能器和第二使能器的使能端;
39、第一使能器的输入端连接乘法器的输出端,第一使能器的输出端连接补偿放大电路的输入端;
40、第二使能器的输入端连接减法器的输出端,第二使能器的输出端连接pi调节器;
41、当使能信号发生器的第一输入端电压大于第二输入端电压时,使能信号发生器输出高电平,第一使能器的输入端和输出端之间连通,第二使能器输出差值信号e(k)给pi调节器;
42、当使能信号发生器的第一输入端电压小于第二输入端电压时,使能信号发生器输出低电平,第一使能器的输入端和输出端之间断开,第二使能器输出给pi调节器的信号保持不变。
43、通过使能信号发生器以及设置一个电压等级比较低的使能参考电压,当发射电流完全关闭时,避免其他电压较低但又不为零的无效信号产生错误的使能信号;通过第一使能器,保证了发射电流完全关闭时,流过补偿线圈的电流为零,避免补偿机构产生干扰;通过第二使能器,保证在发射电流由关闭到再次开启的过程中,差值信号e(k)不变,补偿反馈电路输出的校正系数信号β不变,避免每次都需要大范围自动调整差值信号e(k)和校正系数信号β所引起的干扰。
44、更进一步,的补偿线圈和接收线圈大小形状一致且完全重合。
45、补偿线圈与接收线圈尺寸一致时,补偿线圈圈内的磁通可以全部用于抵消一次场的干扰,最大化补偿效率。
46、更进一步,通过设置发射线圈和接收线圈相对位置,减少发射线圈对接收线圈的干扰,进而降低补偿机构的补偿功率。
47、本发明的益处:可以有效抵消发射线圈对接收线圈的影响,当各线圈之间相对位置发生改变,或者线圈形变,可以根据实际的补偿情况来电控调节补偿电流,避免了重新绕制线圈或者调节发射线圈和接收线圈结构的繁琐工作,极大提高施工效率,同时补偿机构可以适配不同类型的瞬变电磁系统;
48、同时在发射线圈和接收线圈发生形变或相对位置发生改变,只需要手动或自动设置校正系数信号β,即可实现校正功能;当以无人机为平台,通过远程上位机在千米高空进行校正,大大减少校正时间,简化了校正流程;通过设置发射线圈、接收线圈和补偿线圈的相对位置,降低补偿功率。
- 还没有人留言评论。精彩留言会获得点赞!