定位系统的定位方法及装置、存储介质和计算机程序产品与流程
本发明涉及定位系统,尤其是涉及一种定位系统的定位方法及装置、存储介质和计算机程序产品。
背景技术:
1、在相关技术中,采用全球卫星导航系统(global navigation satellite system,gnss)/惯性导航系统(inertial navigation system,ins)组合导航系统将各导航子系统获得的导航数据进行数据融合,从而得到组合导航系统下的最优定位结果,然而在实际应用中,相较于ins的自治系统,gnss更容易受到外界环境的干扰和影响,从而降低后续导航定位的精确度。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。
2、为此,本发明的一个目的在于提出一种定位系统的定位方法,该方法通过对第一数据和/或第二数据进行预处理,有效剔除第一导航定位系统和第二导航定位系统由于外界环境干扰所引发的异常数据,避免异常数据混入正常数据,提高后续导航定位的精确度。
3、为此,本发明的第二个目的在于提出一种定位系统的定位装置。
4、为此,本发明的第三个目的在于提出一种计算机可读存储介质。
5、为此,本发明的第四个目的在于提出一种计算机程序产品。
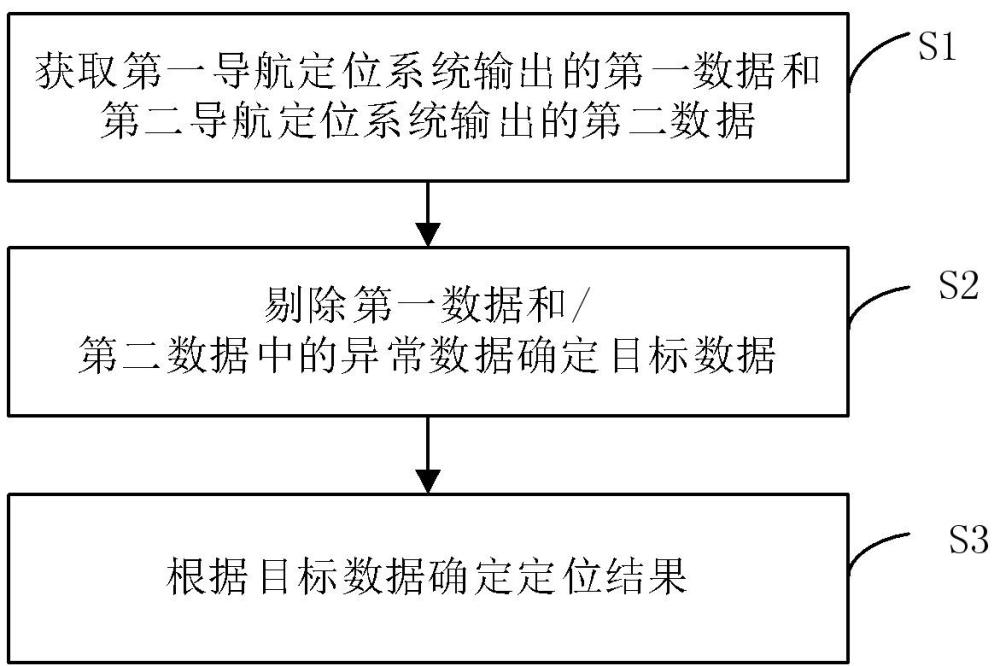
6、为了达到上述目的,本发明的第一方面的实施例提出了一种定位系统的定位方法,所述方法包括:获取第一导航定位系统输出的第一数据和第二导航定位系统输出的第二数据;剔除所述第一数据和/或所述第二数据中的异常数据确定目标数据;根据所述目标数据确定定位结果。
7、根据本发明实施例的定位系统的定位方法,通过第一导航定位系统输出的第一数据和第二导航定位系统输出的第二数据,对获取到的第一数据和/或第二数据进行异常数据检测,以剔除第一数据和/或第二数据中的异常数据,得到目标数据,根据筛选后的目标数据确定定位系统的定位结果,通过对第一数据和/或第二数据进行预处理,有效剔除第一导航定位系统和第二导航定位系统由于外界环境干扰所引发的异常数据,避免异常数据混入正常数据,提高后续导航定位的精确度。
8、在一些实施例中,所述剔除所述第一数据和/或所述第二数据中的异常数据确定目标数据,包括:获取所述第一数据中的定位数据;剔除所述第一数据中的定位数据中的异常定位数据确定所述目标数据。
9、在一些实施例中,所述剔除所述第一数据和/或所述第二数据中的异常数据确定目标数据,包括:获取所述第一数据中的定位数据;剔除所述第一数据中的定位数据中的异常定位数据,得到第一目标数据;根据所述第一目标数据和所述第二数据确定所述目标数据。
10、在一些实施例中,所述剔除所述第一数据和/或所述第二数据中的异常数据确定目标数据,包括:获取所述第二数据中的定位数据;剔除所述第二数据中的定位数据中的异常定位数据确定所述目标数据。
11、在一些实施例中,所述剔除所述第一数据和/或所述第二数据中的异常数据确定目标数据,包括:获取所述第一数据中的定位数据和所述第二数据中的定位数据;对应剔除所述第一数据中的定位数据中的异常定位数据和所述第二数据中的定位数据中的异常定位数据,得到第一目标数据和第二目标数据;根据所述第一目标数据和所述第二目标数据确定所述目标数据。
12、在一些实施例中,所述剔除所述定位数据中的异常定位数据,包括:确定所述定位数据的第一边界平均值和第二边界平均值;根据所述第一边界平均值和所述第二边界平均值剔除所述定位数据中的异常定位数据。
13、在一些实施例中,所述根据所述第一边界平均值和所述第二边界平均值剔除所述定位数据中的异常定位数据,包括:根据所述第一边界平均值和所述第二边界平均值确定有效区域;剔除所述有效区域外的异常定位数据。
14、在一些实施例中,所述根据所述第一边界平均值和所述第二边界平均值确定有效区域,包括:将所述第一边界平均值作为有效下限值,并将所述第二边界平均值作为有效区域上限值,以确定所述有效区域。
15、在一些实施例中,所述剔除所述定位数据中的异常定位数据,包括:根据预设种类的所述定位数据确定初始聚类中心;确定所述定位数据的待分类定位数据;循环根据所述初始聚类中心和所述待分类定位数据确定所述待分类定位数据中的异常定位数据,剔除所述异常定位数据。
16、在一些实施例中,所述循环根据所述初始聚类中心和所述待分类定位数据确定所述待分类定位数据中的异常定位数据,剔除所述异常定位数据,包括:获取所述待分类定位数据和所述初始聚类中心的距离;将所述待分类定位数据划分至与所述初始聚类中心距离最小的设定簇中;确定所述设定簇中所述待分类定位数据的均值;将所述均值作为所述设定簇的目标簇中心;在所述目标簇中心不变时,剔除所述设定簇外的所述异常定位数据。
17、在一些实施例中,所述剔除所述定位数据中的异常定位数据,包括:获取所述定位数据到相邻定位数据的距离平均值;根据所述定位数据和所述距离平均值确定密度划定区域;获取所述密度划定区域的密度值;根据所述密度值筛选所述定位数据中的异常定位数据,剔除所述定位数据中的异常定位数据。
18、在一些实施例中,所述根据所述定位数据和所述距离平均值确定密度划定区域,包括:将所述定位数据作为圆心,并将所述距离平均值作为半径;根据所述圆心和所述半径确定所述密度划定区域。
19、在一些实施例中,所述获取所述密度划定区域的密度值,包括:将处于所述密度划定区域内的定位数据的数量值作为所述划定区域的密度值。
20、在一些实施例中,所述根据所述密度值筛选所述定位数据中的异常定位数据,包括:根据所述密度值和所述定位数据获取所述定位数据中的高密度点和低密度点;根据所述高密度点和所述低密度点确定所述异常定位数据。
21、在一些实施例中,所述根据所述密度值和所述定位数据获取所述定位数据中的高密度点,包括:将所述密度值大于或等于预设密度阈值的点作为所述高密度点。
22、在一些实施例中,所述根据所述密度值和所述定位数据获取所述定位数据中的低密度点,包括:将所述密度值小于预设密度阈值的点作为所述低密度点。
23、在一些实施例中,所述根据所述高密度点和所述低密度点确定所述异常定位数据,包括:若所述密度划分区域之间有高密度点和/或低密度点重合,则连接所述高密度点和/或所述低密度点,得到筛选簇;将所述筛选簇外的点作为所述异常定位数据。
24、在一些实施例中,所述根据所述目标数据确定定位结果,包括:确定所述目标数据和所述第一数据的数据差值,或确定所述目标数据和所述第二数据的数据差值;根据所述数据差值确定所述定位结果。
25、在一些实施例中,所述根据所述数据差值确定所述定位结果,包括:若所述数据差值大于预设偏差阈值,去除所述目标数据;根据所述第一数据确定定位结果,或,根据所述第二数据确定定位结果。
26、在一些实施例中,所述根据所述数据差值确定所述定位结果,包括:若所述数据差值小于或等于预设偏差阈值,确定所述目标数据的第一权重和所述第一数据的第二权重,或确定所述目标数据的第一权重和所述第二数据的第二权重;根据所述第一权重和所述第二权重对应对所述目标数据和所述第一数据加权,或,根据所述第一权重和所述第二权重对应对所述目标数据和所述第二数据加权,确定所述定位结果。
27、为了达到上述目的,本发明的第二方面的实施例提出了一种定位系统的定位装置,所述装置包括:获取模块,用于获取第一导航定位系统输出的第一数据和第二导航定位系统输出的第二数据;剔除模块,用于剔除所述第一数据和/或所述第二数据中的异常数据确定目标数据;确定模块,用于根据所述目标数据确定定位结果。
28、根据本发明实施例的定位系统的定位装置,通过第一导航定位系统输出的第一数据和第二导航定位系统输出的第二数据,对获取到的第一数据和/或第二数据进行异常数据检测,以剔除第一数据和/或第二数据中的异常数据,得到目标数据,根据筛选后的目标数据确定定位系统的定位结果,通过对第一数据和/或第二数据进行预处理,有效剔除第一导航定位系统和第二导航定位系统由于外界环境干扰所引发的异常数据,避免异常数据混入正常数据,提高后续导航定位的精确度。
29、为了达到上述目的,本发明的第三方面的实施例提出了一种计算机可读存储介质,所述计算机可读存储介质上存储有定位系统的定位程序,所述定位系统的定位程序被处理器执行时实现上述实施例所述的定位系统的定位方法。
30、为了达到上述目的,本发明的第四方面的实施例提出了一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现上述实施例所述的定位系统的定位方法。
31、根据本发明实施例的计算机程序产品,通过第一导航定位系统输出的第一数据和第二导航定位系统输出的第二数据,对获取到的第一数据和/或第二数据进行异常数据检测,以剔除第一数据和/或第二数据中的异常数据,得到目标数据,根据筛选后的目标数据确定定位系统的定位结果,通过对第一数据和/或第二数据进行预处理,有效剔除第一导航定位系统和第二导航定位系统由于外界环境干扰所引发的异常数据,避免异常数据混入正常数据,提高后续导航定位的精确度。
32、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!