一种植保无人机作业轨迹跟踪精度测试方法及系统与流程
本发明涉及无人机轨迹测试,尤其涉及一种植保无人机作业轨迹跟踪精度测试方法及系统。
背景技术:
1、植保无人机在喷洒肥料作业时需要预先设定作业的轨迹和高度,然后开启自主控制模式沿着预先设定的轨迹和高度进行作业。
2、根据我国制定的ny/t 3213-2018《植保无人飞机质量评价技术规范》中7.3.2自主控制模式飞行精度测试的要求,植保无人机需要在额定质量条件下,在试验场内预设飞行航线,植保无人机在自主控制飞行模式下对其空间位置进行连续测量和记录,评价其水平偏航距和高度偏航距。
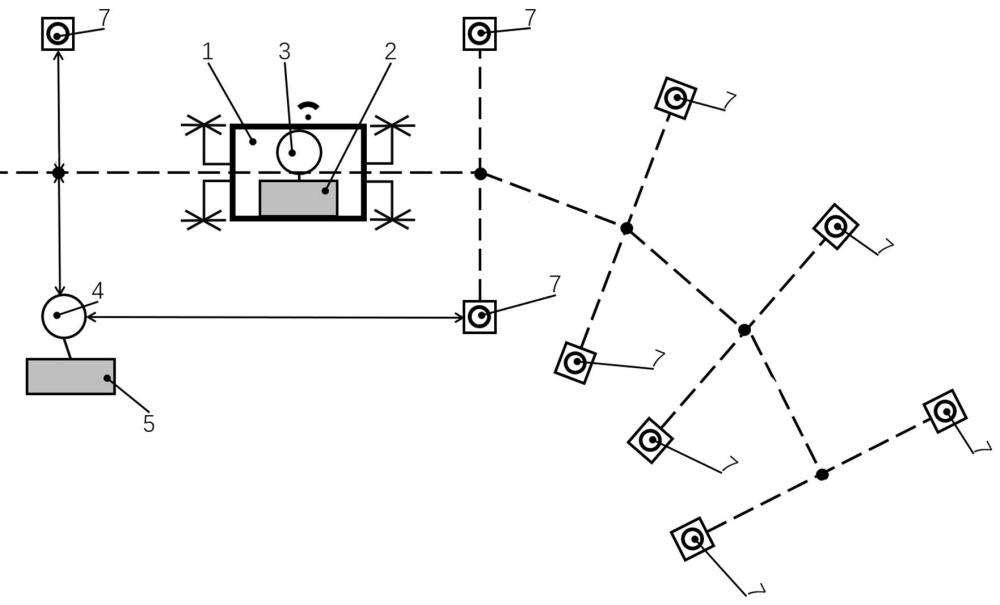
3、目前,绝大部分的测试方法如图1所示,在被测植保无人机01上安装流动站02,在地面设置基站04。基站04通过gnss天线获取卫星定位数据,经计算得到差分数据并通过无线发送给流动站02。基站04为流动站02提供相对定位参考。流动站02通过gnss天线03获得卫星定位数据,与流动站02提供的差分数据进行计算,解析后得到定位精度为厘米级的无人机经纬度坐标、海拔和速度数据。被测植保无人机01在自主控制模式下飞行时,流动站02对其空间位置进行连续测量和记录,上位机05接收所有数据评价其水平偏航距和高度偏航距。
4、然而,实际测试过程中往往需要在不同环境下测量植保无人机的作业轨迹跟踪精度,比如在多云天气情况下或者周围有树林遮挡环境条件下测量植保无人机的作业轨迹跟踪精度,此时由于云朵或树木遮挡gnss信号,造成流动站02接收到的gnss信号减弱而造成空间位置测量精度降低,造成测试结果较大的偏差。
技术实现思路
1、本发明的目的是提供一种植保无人机作业轨迹跟踪精度测试方法及系统,采用了卫星定位和超声波平面定位的数据融合方法,即使是在多云天气情况下或者周围有树林遮挡环境条件下gnss信号强度降低,也可以始终获得厘米级的定位精度,测试精度高且稳定。
2、为了实现上述目的,本发明所采用的技术方案是:一种植保无人机作业轨迹跟踪精度测试方法,包括以下步骤:
3、步骤1、在待测试的环境中预先规划被测植保无人机的测试轨迹,测试轨迹可分为n段,n段测试轨迹总共包含n+1个植保无人机飞行控制点;
4、步骤2、在被测植保无人机飞行轨迹起点左右两侧分别设置基站和超声波接收器,分别在其他植保无人机飞行控制点左右两侧设置一对超声波接收器;
5、步骤3、基站获取卫星定位数据,计算生成rtcm差分数据发送给其他的超声波接收器和流动站;超声波接收器将rtcm差分数据转发给下一对超声波接收器,形成rtcm差分数据的远距离覆盖;
6、步骤4、将流动站安装在被测植保无人机上,流动站获取卫星定位数据并接收基站或者超声波接收器发送的rtcm差分数据,将卫星定位数据和差分数据融合计算获得定位精度为厘米级的被测植保无人机起点位置坐标的初始化;
7、步骤5、将被测植保无人机依次放在各个植保无人机飞行控制点上,流动站给所有的超声波接收器发送同步开始测试信号和超声波,超声波接收器接收同步开始测试信号和超声波并记录开始时间,通过时间差计算出与被测植保无人机的距离,并将测试距离和id发送给基站,上位机连接基站读取数据计算出被测植保无人机作业轨迹的空间位置和各个超声波接收器的空间位置,完成测试轨迹的初始化工作;
8、步骤6、开启被测植保无人机自主控制模式,被测植保无人机沿着飞行轨迹和一定高度进行飞行作业;作业过程中流动站定期给所有的超声波接收器发送同步开始测试信号和超声波,超声波接收器接收同步开始测试信号、超声波并记录开始时间,通过时间差计算出与被测植保无人机的距离,并将测试距离和id发送回流动站;流动站选择距离自己最近的四个超声波接收器发送的测试距离和id进行空间平面的连续定位,实时计算出被测植保无人机的空间平面坐标;在定位过程中,流动站将获取的卫星定位数据和超声波平面定位数据进行数据融合计算;
9、步骤7、被测植保无人机到达终点后测试结束;上位机接收流动站采集的连续空间位置数据,并进行结果的评价。
10、优选的,被测植保无人机自主控制飞行时,将激光高度计安装在被测植保无人机上,测试被测植保无人机与地面的相对高度,流动站采集被测植保无人机飞行过程中的运动加速度和角速度,解算出被测植保无人机的飞行姿态与激光高度计采集的高度进行解算,测得被测植保无人机飞行时与地面的垂直高度数据。
11、优选的,所述步骤1中的待测试的环境为多云天气情况下或者周围有树林遮挡环境条件下。
12、优选的,所述步骤3中在基站获取卫星定位数据之前,先将基站和九个超声波接收器全部通电完成初始化。
13、优选的,所述步骤3中基站通电后内置的gnss模块通过gnss天线获取卫星定位数据并发送给基站wifi模块,基站wifi模块计算生成rtcm差分数据并通过wifi天线发送给其他的超声波接收器和流动站;超声波接收器内置的超声波接收器wifi模块接收到rtcm差分数据并通过wifi天线接着转发给下一对超声波接收器,形成rtcm差分数据的远距离覆盖。
14、优选的,所述步骤4中将被测植保无人机放置在测试轨迹的起始点,设置为飞行起点,流动站内置的gnss+imu惯导模块通过gnss天线获取卫星定位数据并发送给流动站wifi模块,流动站wifi模块同时接收基站或者超声波接收器发送的rtcm差分数据。
15、优选的,所述步骤5中流动站通过内置的流动站wifi模块给所有的超声波接收器发送同步开始测试信号,同时通过超声波发射器发送超声波;超声波接收器通过内置的超声波接收器wifi模块接收同步开始测试信号并记录开始时间,同时通过内置的超声波接收模块接收超声波发射器发送的超声波并记录接收时间,超声波接收器wifi模块通过时间差计算出与被测植保无人机的距离,并将测试距离和id通过wifi天线发送给基站,上位机连接基站读取数据计算出作业轨迹的空间位置和所有超声波接收器的空间位置,完成测试轨迹的初始化工作。
16、优选的,所述步骤6中开启被测植保无人机自主控制模式,被测植保无人机沿着飞行轨迹和一定高度进行飞行作业;作业过程中流动站定期通过内置的流动站wifi模块给所有的超声波接收器发送同步开始测试信号和通过超声波发射器发送超声波;超声波接收器通过内置的超声波接收器wifi模块接收同步开始测试信号并记录开始时间,同时通过内置的超声波接收模块接收超声波发射器发送的超声波并记录接收时间,超声波接收器wifi模块通过时间差计算出与被测植保无人机的距离,并将测试距离和id通过wifi天线发送回流动站;流动站选择距离自己最近的四个超声波接收器发送的测试距离和id进行空间平面的连续定位,实时计算出被测植保无人机的空间平面坐标;在定位过程中,流动站将gnss+imu惯导模块获取的卫星定位数据和超声波平面定位数据进行数据融合计算。
17、一种植保无人机作业轨迹跟踪精度测试系统,包括被测植保无人机、流动站、激光高度计、超声波发射器、基站、上位机和多个超声波接收器;
18、所述被测植保无人机的测试轨迹可分为n段,n段测试轨迹总共包含n+1个植保无人机飞行控制点;
19、所述流动站和激光高度计安装在被测植保无人机上;所述基站和其中一个超声波接收器分别设置在被测植保无人机飞行轨迹起点左右两侧,另外其他超声波接收器分别设置在其他无人机飞行控制点左右两侧;
20、所述流动站内置有gnss+imu惯导模块、gnss天线、流动站wifi模块、电源模块、can通讯模块和超声波发射器;
21、所述基站内置有gnss模块、gnss天线、基站wifi模块、超声波接收模块、电源模块;
22、所述超声波接收器内置有超声波接收器wifi模块,电源模块、超声波接收模块;
23、所述上位机连接基站读取数据计算出被测植保无人机作业轨迹的空间位置和九个超声波接收器的空间位置。
24、优选的,所述植保无人机飞行控制点包括被测植保无人机飞行轨迹起点、被测植保无人机飞行轨迹终点和多个途径点。
25、本发明的有益效果是:
26、本方案不仅适用于植保无人机直线轨迹跟踪精度测试,也适用于多段轨迹跟踪精度的测试和评价。由于采用了卫星定位和超声波平面定位的数据融合方法,即使是在多云天气情况下或者周围有树林遮挡环境条件下gnss信号强度降低,也可以始终获得厘米级的定位精度,测试精度高且稳定。同时,由于激光高度计与植保无人机刚性固定,植保无人机在空中摆动会造成激光高度计的探头不是垂直于地面,且高度值大范围摆动,本发明在高度控制精度测试过程中使用激光高度计和imu解算的姿态进行数据融合,即使植保无人机摆动也可准确、稳定测得无人机到地面的垂直高度。
- 还没有人留言评论。精彩留言会获得点赞!