一种基于三个可变形圆形元件高度变化的测力装置
本发明涉及力测量,特别是一种基于三个可变形圆形元件高度变化的测力装置。
背景技术:
1、随着科技的进步和人们生活水平的提高,对高性能测力装置的需求日益增加。这些装置已在工业自动化、医疗诊断、食品生产、生物力学等多个领域得到广泛应用。常见的测力装置包括磁感应测力装置、压电测力装置和光纤测力装置等。尽管这些测力装置在特定场景中表现出色,但在精度、重量和成本方面仍面临诸多挑战。目前的测力装置通常依赖复杂的传感器系统或机械结构来实现力的测量,这不仅导致装置重量较大,还使得制造和维护成本居高不下,限制了其在更广泛领域中的应用。此外,一些高精度测力装置虽然能够提供可靠的测量结果,但其复杂的结构使得操作和维护过程变得繁琐。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于三个可变形圆形元件高度变化的测力装置,该测力装置通过独特的设计,提供了一种具备高精度、轻量且经济实惠的测力解决方案,显著提升了测力装置的实用性和普及度。
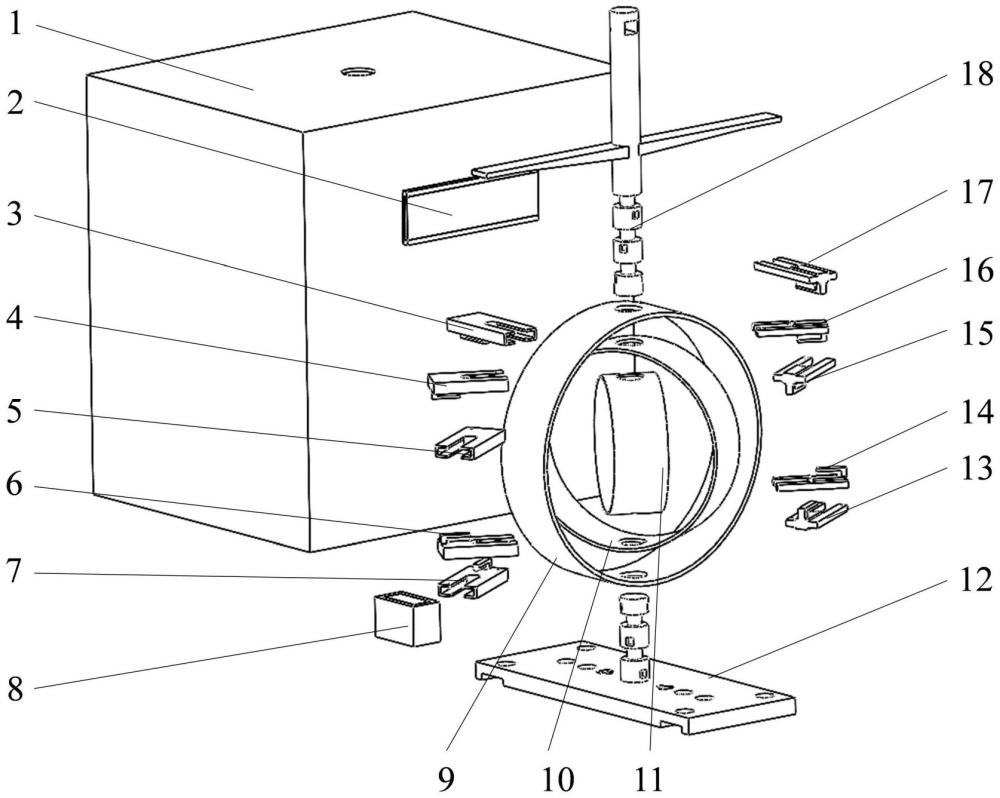
2、为实现上述目的,本发明采用如下技术方案:一种基于三个可变形圆形元件高度变化的测力装置,包括外壳(1)、第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)、载荷承受单元(18)、第一连接板(3)、第二连接板(4)、第三连接板(5)、第四连接板(6)、第五连接板(7)、第一板副(13)、第二板副(14)、第三板副(15)、第四板副(16)、第五板副(17)、底板(12)、激光测距仪(8)和显示控制模块(2),所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的底部经过旋转后固定在底板(12)上,并通过第四连接板(6)、第五连接板(7)和第一板副(13)、第二板副(14)确保其稳固固定;所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)在外力作用下改变其静态构型的高度,且在不同外力作用下对应不同的静态构型高度;所述载荷承受单元(18)安装在所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的顶部,并通过第一连接板(3)、第二连接板(4)、第三连接板(5)和第三板副(15)、第四板副(16)、第五板副(17)将其整合为一体,以确保在外力加载时,所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)同步受力,从而保持高度变化的一致性;所述激光测距仪(8)安装在外壳(1)的一侧,且其探测方向朝上,以测量所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)高度的变化;所述激光测距仪(8)与外壳上的显示控制模块(2)电性连接,以将实时测量数据传送给显示控制模块(2),所述显示控制模块(2)根据预先确定的外力与所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)高度之间的函数关系曲线,计算并确定外力的大小。
3、在一较佳的实施例中,所述外力与所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)高度之间的函数关系曲线是通过解算三个可变形圆形元件静态平衡方程得到;
4、所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)在竖向外力作用下发生变形,由于所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)都遵循外力与圆形元件顶部位移之间的理论模型,此时建立坐标系,所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的底部固定在笛卡尔坐标系的原点,顶部受到y轴上的压力或拉力;鉴于后续的理论分析对于可变形圆形元件在承受拉力或压力时相似,压力被作为理论分析的例子;在没有外力作用的初始状态下,所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)不受内力或扭矩影响;当施加压力于圆形元件的顶部时,所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)产生内力和扭矩以平衡该压力;随着压力的施加,所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的高度会降低,直到系统达到新的平衡状态;所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)右半部分的能量泛函表示为:
5、
6、其中,i=1,2,3分别代表所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11);所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的弯曲刚度ki=eii,e为弹性模量,ii为相应的转动惯量,i=1,2,3;分别由弹性模量和转动惯量决定;s1,s2和s3分别表示所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的弧长,所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的底部和为自然坐标的原点;所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)上任意点相对于x轴的偏转角分别用θ1(s1),θ2(s2)和θ3(s3)表述,θ'i(si)=dθi/dsi(i=1,2,3)代表曲率,内力沿x方向的分量由和表示,而加载在所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)顶部的压力的三个分力分别为和所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)底部的内力矩由表示,而顶部的内力矩由m(πri)=kiθ'i(πri)(i=1,2,3)表示;能量泛函中的约束条件体现所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)相对于y轴的对称性;最终,能量泛函重新表述为:
7、
8、式中,即其中ξ1,ξ2和ξ3作为不同的小的正参数,将w的一阶变差表示为:
9、
10、考虑到η1(s1),η2(s2)和η3(s3)的任意性,对所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的右半部分进行平衡方程的推导如下:
11、
12、其中,i=1,2,3;此外,可变形圆形元件满足不可拉伸条件
13、xi′(si)=cosθi(si),yi′(si)=sinθi(si)
14、通过结合以下条件,数值求解所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)在不同外力作用下的平衡构型;首先,考虑微分方程组以及连续性条件,所述连续性条件包括变量(θ1,θ'1,x1,y1,θ2,θ'2,x2,y2,θ3,θ'3,x3,y3);在所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)上应连续;此外,还需满足边界条件:θi(0)=0,yi(0)=0,xi(0)=0,xi(πri)=0,θi(πri)=π(i=1,2,3),通过整合连续性条件,对所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的平衡状态进行数值求解;
15、根据上述等式,推导出所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)顶部位移和施加压力之间的关系;所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的初始高度分别为2r1,2r2和2r3;由于它们的连接结构,在分压力和的作用下,所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)的顶部会发生相同的向下位移;通过对在施加这些分压力下的所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)进行数值求解,进一步计算出所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)顶部的位移δy:
16、
17、式中,i=1,2,3;
18、推导出所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)顶部的位移与施加压力和之间的关系,由此,通过测量圆形元件顶部的位移,间接确定施加的压力;由于所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)顶部的位移相同,通过累加所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)所受的压力,来间接计算总压力类似的方法也适用于分析拉力情况。
19、在一较佳的实施例中,通过调整可变形圆形元件的弯曲刚度,可以改变所述第一可变形圆形元件(9)、第二可变形圆形元件(10)、第三可变形圆形元件(11)顶部位移与施加外力的函数关系,从而实现对测力装置测量范围的调节。
20、在一较佳的实施例中,所述显示控制模块(2)包括显示屏,所述显示屏嵌入外壳的一侧,所述显示控制模块将计算得到的外力值显示在显示屏上。
21、与现有技术相比,本发明具有以下有益效果:
22、(1)该测力装置基于三个可变形圆形元件在外力作用下会改变其静态构型高度的原理来实现对外力的测量,其结构简单且制作成本低廉,重量轻便且易于操作,并且在测量过程中表现出较高的准确性和可靠性。
23、(2)为了适应不同的测量范围,该测力装置允许通过调整三个可变形圆形元件的尺寸参数或使用具有更大弹性模量的材料来进行制作。这种灵活性使得装置能够满足多种测量需求。
24、(3)该测力装置具有优良的结构稳定性和较长的使用寿命。它的重复性高,对环境适应性强,安装和更换过程也非常简便。这些特性使得装置在实际应用中表现出较强的耐用性和易维护性。
- 还没有人留言评论。精彩留言会获得点赞!