一种自主导航方法、系统、介质及导航机器人与流程
本技术涉及智能导航,尤其涉及一种自主导航方法、系统、介质及导航机器人。
背景技术:
1、传统的机器人导航通常被视为几何问题,通过构建环境的三维模型来规划路径。但这种方法在开放环境中的应用存在局限性,主要原因在于需要解决开放环境中的碰撞问题,例如,机器人需要知道草地可以穿越,而泥地则不可穿越。
2、在开放环境中,导航不仅需要几何信息,更需要对地形可穿越性的感知。为此,现有技术通常依赖带有语义信息的地图导航,利用带有语义标签的地图帮助机器人识别不同地形的特性,以及通过训练模型直接学习对场景的理解,从而实现端到端的导航。
3、但是,语义标签对复杂多变的地形特性描述有限,会导致现有技术在开放环境中的自主导航能力大打折扣。
技术实现思路
1、为了解决或者部分解决现有技术在开放环境中的自主导航能力低下的技术问题,本发明提供了一种自主导航方法、系统、介质及导航机器人,考虑到地形可穿越性的感知主要依赖于视觉观察,可将当前场景和印象场景的“地图”匹配完成导航,因此本发明模拟这样视觉匹配逻辑,在可到达并可观察到的情况下,匹配当前位置观察的目标观察之间的位置关系,提高自主导航能力。
2、为解决上述技术问题,本发明的第一方面,公开了一种自主导航方法,所述方法包括:
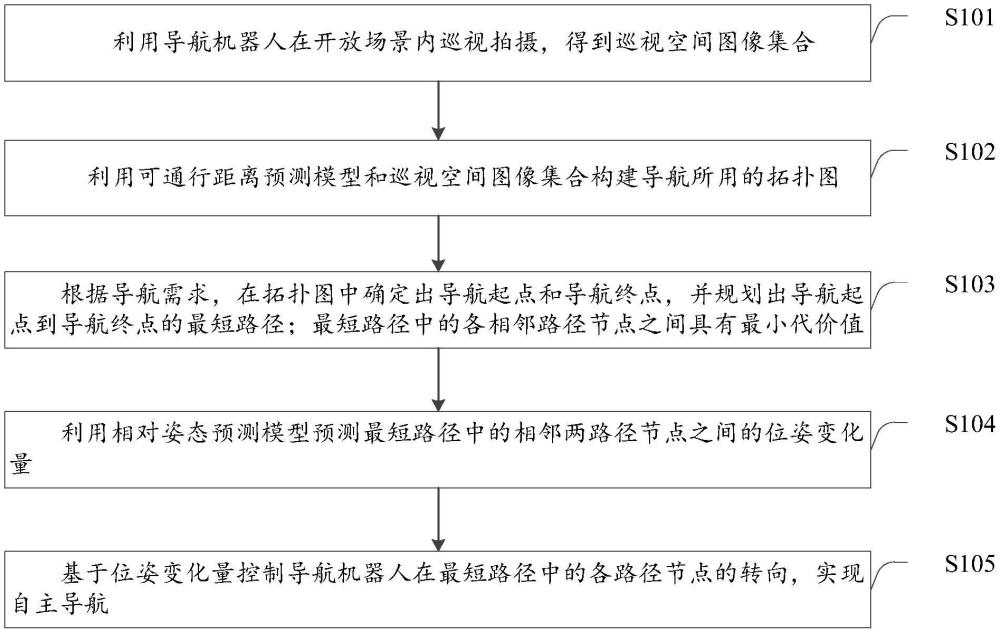
3、利用导航机器人在开放场景内巡视拍摄,得到巡视空间图像集合;
4、利用可通行距离预测模型和所述巡视空间图像集合构建导航所用的拓扑图;在所述拓扑图中,每个节点对应所述巡视空间图像集合中的一张空间图像,两个节点之间的边表示两张空间图像之间的可通行路径,所述可通行路径携带有可通行概率,采用所述可通行距离预测模型预测得到并用作导航;
5、根据导航需求,在所述拓扑图中确定出导航起点和导航终点,并规划出所述导航起点到所述导航终点的最短路径;所述最短路径中的各相邻路径节点之间具有最小代价值;
6、利用相对姿态预测模型预测所述最短路径中的相邻两路径节点之间的位姿变化量;
7、基于所述位姿变化量控制导航机器人在所述最短路径中的各路径节点的转向,实现自主导航。
8、可选的,所述可通行距离预测模型按照下述方式训练得到:
9、在所述开放场景内,利用导航机器人在同一轨迹上移动拍摄获得空间图像数据集,并从中取得由可通行的相邻空间图像样本组成的正观察对作为正样本;其中,所述正观察对标记有实测帧间距和实测位姿;所述实测帧间距用于表征相邻空间图像的空间位置;所述正观察对的实测位姿,是在自身坐标系下,相邻空间图像中各空间图像相对于上一时刻的导航机器人所在位置的坐标和航向角;
10、在不同轨迹上采样由不可通行、不相邻的两帧空间图像组成负观察对,作为负样本;其中,所述负观察对标记有不可通行的帧间距和对应位姿;
11、以最小化所述实测帧间距和预测帧间距的交叉熵损失为目标,采用所述正样本和所述负样本共同训练可通行距离基础模型,得到所述可通行距离预测模型;其中,所述可通行距离基础模型包括图像编码器和全连接层;其中,所述全连接层用于将所述图像编码器处理所述正样本和所述负样本得到的潜在变量投影计算为所述预测帧间距。
12、可选的,在所述相对姿态预测模型的训练中,以最小化所述实测位姿和所述预测位姿的交叉熵损失为目标,采用所述正样本和所述负样本共同训练相对姿态基础模型,得到所述相对姿态预测模型;其中,所述相对姿态基础模型为包括所述图像编码器和所述全连接层;其中,所述全连接层用于将所述图像编码器处理所述正样本和所述负样本得到的潜在变量投影计算为所述预测位姿。
13、可选的,在所述可通行距离预测模型和所述相对姿态预测模型的训练中,以所述实测帧间距和预测帧间距的交叉熵损失、所述实测位姿和所述预测位姿的交叉熵损失同时最小化为目标进行训练。
14、可选的,所述利用可通行距离预测模型和所述巡视空间图像集合构建导航所用的拓扑图,具体包括:
15、按照时间先后顺序从所述巡视空间图像集合中提取相邻帧空间图像,并输入所述可通行距离预测模型进行可通行预测,得到对应的可通行路径及其可通行概率;
16、利用所述相邻帧空间图像、对应的可通行路径及其可通行概率构建所述拓扑图m;其中,在所述拓扑图中没有规划不可通行路径。
17、可选的,所述利用所述相邻帧空间图像、对应的可通行路径及其可通行概率构建所述拓扑图,具体包括:
18、按照δ1<t(oi,oj)<δ2的筛选标准,筛选出构建所述拓扑图所用的可通行路径;其中,t(oi,oj)指所述相邻帧空间图像经由所述可通行距离预测模型预测出的可通行概率;δ1、δ2分别表示可通行下限阈值和可通行上限阈值,小于所述可通行下限阈值表示所述相邻帧空间图像之间为可通行路径且极易穿越,大于所述可通行上限阈值表示所述相邻帧空间图像之间不可通行。
19、可选的,所述规划出所述导航起点到所述导航终点的最短路径,具体包括:
20、将所述拓扑图中的所有节点的通行代价值初始化为最大代价值,且所述导航起点的通行代价值初始化为最小代价值;
21、以所述导航起点、所述导航起点对应的各相邻节点、所述各相邻节点各自对应的相邻节点的辐射顺序,将相邻节点之间的可通行概率转换为通行成本;
22、按照所述辐射顺序,结合所述通行成本计算各节点之间的实际代价值,用以替换对应的最大代价值,直至所述导航终点;其中,可通行概率和通行成本成反向关系;
23、在所述导航起点到所述导航终点之间,选择代价值最小的路径节点构成所述最短路径。
24、本发明的第二方面,公开了一种自主导航系统,包括:
25、拍摄模块,用于利用导航机器人在开放场景内巡视拍摄,得到巡视空间图像集合;
26、构建模块,用于利用可通行距离预测模型和所述巡视空间图像集合构建导航所用的拓扑图;在所述拓扑图中,每个节点对应所述巡视空间图像集合中的一张空间图像,两个节点之间的边表示两张空间图像之间的可通行路径,所述可通行路径携带有可通行概率,采用所述可通行距离预测模型预测得到并用作导航;
27、确定模块,用于根据导航需求,在所述拓扑图中确定出导航起点和导航终点,并规划出所述导航起点到所述导航终点的最短路径;所述最短路径中的各相邻路径节点之间具有最小代价值;
28、预测模块,用于利用相对姿态预测模型预测所述最短路径中的相邻两路径节点之间的位姿变化量;
29、控制模块,用于基于所述位姿变化量控制导航机器人在所述最短路径中的各路径节点的转向,实现自主导航。
30、本发明的第三方面,公开了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述方法的步骤。
31、本发明的第四方面,公开了一种导航机器人,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述方法的步骤。
32、通过本发明的一个或者多个技术方案,本发明具有以下有益效果或者优点:
33、本发明中的技术方案,利用可通行距离预测模型和相对位姿预测模型的连续场景理解能力学习开放环境中的复杂多变的地形之间的可通行概率和相对位置关系,并据此构建导航所用的拓扑图m,在拓扑图m中记载了可以通行的空间位置、可通行路径及其可通行概率。因此,在实际导航部署时,可从拓扑图m中定位出导航起点和导航终点及其之间的最短路径,再控制导航机器人在所述最短路径中的各路径节点的转向即可实现自主导航。由此可见,本技术方案能够在复杂多变的环境中实现自主导航,既以拓扑图有效地简化环境表示,减少计算量,又提供了细粒度位姿控制,从而实现精确的长距离导航,显著提升自主机器人在开放环境中的导航能力。
34、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!