一种基于无人机的环境监测系统的制作方法
本发明涉及环境监测,尤其涉及一种基于无人机的环境监测系统。
背景技术:
1、核能作为高效清洁的低碳能源,其重要性在碳中和背景下愈发凸显。在核能利用的过程中,一旦发生泄漏等事故对其周围环境将造成重大破坏,因此对核能设施周围的环境进行有效监测十分重要。而内陆的核辐射污染一般都跟随大气的流动传播。当发生核泄漏的同时能够对核污染的扩散做出有效的监测和预测对防止核污染进一步扩散有着重大的意义,并能够及时疏散群众减少损失。
2、中国专利申请公开号:cn115856985a公开了一种大气放射性污染的无人机协同监测方法,该发明提供一种大气放射性污染的无人机协同监测方法,属于环境监测技术领域,为取代传统的大气放射性污染监测过程提供了解决方法;包括如下步骤:s1、携带核辐射传感器的无人机编队在目标区域开始探测;s2、无人机编队进行多点随机探测,获取多个探测点处的辐射剂量率;s3、中心无人机通过搭载的数据处理单元,进行信息收集,绘制放射源的辐射剂量率分布等值面图并共享;s4、所有无人机沿着辐射剂量率强度上升最快的方向前进并进行探测;
3、s5、重复上述步骤,直至完成整个目标空域的大气放射性污染监测工作,得到监测结果数据;该发明通过对编队采集信息进行融合决策,实时获取污染强度,能进行高效监测,具有监测及时和范围广的优点。
4、中国专利申请公开号:cn109764905a公开了一种用于核辐射环境的无人机与机器人监测系统,该发明公开了一种用于核辐射环境的无人机与机器人监测系统,该系统包括:无人机平台、机器人平台、控制操作平台;所述无人机平台包括动力系统、超声波测距模块、导航模块、摄像模块和无线传输模块;所述机器人平台包括动力系统、控制模块、自定位模块、核辐射剂量探测装置、数据采集模块和无线传输模块;所述控制操作平台包括无线传输模块、主控模块、数据传输模块、上位机和人机交互界面;本发明利用无人机进入到核辐射区域快速采集环境地理信息,将地理信息传回控制操作平台以制定机器人的巡航路线,机器人沿着设定的路线进行区域核辐射探测并将数据传回控制操作平台;该发明系统能够有效地实现核辐射区域剂量测量及热点定位,并实时在线监测。
5、但是,上述方法存在以下问题:无法在监测过程中对辐射扩散进行动态监测,在辐射量过大对通讯系统造成干扰的情况下,无法解决无人机的通信问题,无法结合气流和地形的因素预测辐射污染的方向并调整无人机的监测位置,在多架无人机发生故障时未设置应对措施。
技术实现思路
1、为此,本发明提供一种基于无人机的环境监测系统,用以克服现有技术中无法在监测过程中对辐射扩散进行动态监测,在辐射量过大对通讯系统造成干扰的情况下,无法解决无人机的通信问题,无法结合气流和地形的因素预测辐射污染的方向并调整无人机的监测位置,在多架无人机发生故障时未设置应对措施的问题。
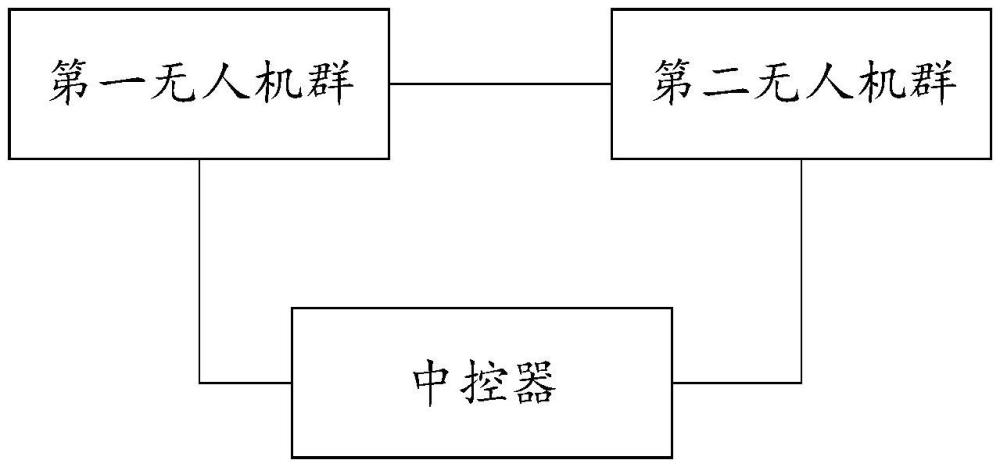
2、为实现上述目的,本发明提供一种基于无人机的环境监测系统,包括:
3、第一无人机群,其用以检测辐射程度并传输检测结果;
4、第二无人机群,其与所述第一无人机群相连,用以检测辐射地区的气流情况并传输所述气流情况,以及传输辐射地区的地形图像;
5、中控器,其分别与所述第一无人机群和所述第二无人机群相连,用以接收所述检测结果、所述地形图像和所述气流情况并预测出辐射污染路径,以及,根据所述检测结果和所述气流情况确定并发出移动信号至所述第一无人机群,根据所述气流情况调整所述第二无人机群的高度;
6、其中,所述第一无人机群包含若干第一类无人机,所述第二无人机群包含若干第二类无人机,单个所述第二类无人机与若干所述第一类无人机连接;
7、其中,所述气流情况包括所述辐射地区的风向和风速;所述移动信号包括高度变化信号和位置移动信号。
8、所述中控器接收所述检测结果并根据第一预设辐射值和第二预设辐射值确定所述第一类无人机位置,其中,
9、若所述检测结果小于所述第一预设辐射值,则所述中控器判定所述检测结果对应的第一类无人机处于边缘地带;
10、若所述检测结果不小于所述第一预设辐射值且小于所述第二预设辐射值,则所述中控器判定所述检测结果对应的第一类无人机处于扩散地带;
11、若所述检测结果不小于所述第二预设辐射值,则所述中控器判定所述检测结果对应的第一类无人机处于主扩散地带;
12、其中,所述边缘地带为由于辐射污染物跟随空气流动造成辐射量小于所述第一预设辐射值的地区;所述主扩散地带为由于辐射污染物跟随空气流动造成辐射量不小于所述第二预设辐射值的地区;所述扩散地带为由于辐射污染物跟随空气流动造成辐射量不小于所述第一预设辐射值且小于所述第二预设辐射值的地区;
13、所述第一预设辐射值和所述第二预设辐射值与所述第一类无人机相距辐射源距离呈负相关。
14、进一步地,所述中控器接收所述辐射地区的风速并根据风速预设值确定所述第二类无人机高度,其中,
15、若所述辐射地区的风速小于所述风速预设值,则所述中控器降低所述第二类无人机的高度;
16、若所述辐射地区的风速不小于所述风速预设值,则所述中控器升高所述第二类无人机的高度;
17、其中,所述风速预设值与所述第二类无人机相距辐射源距离呈正相关。
18、进一步地,所述中控器记录各所述第一类无人机在各时刻的位置,根据所述各时刻的位置模拟出辐射扩散方向。
19、进一步地,所述中控器结合所述地形图像和所述风向模拟出辐射预测方向。
20、进一步地,所述中控器分析所述辐射扩散方向和所述辐射预测方向得到两者夹角,根据所述两者夹角情况确定移动信号以调整所述第一无人机群,其中,
21、若所述两者夹角为锐角,则所述中控器调整所述第一无人机群移动方向为所述辐射预测方向;
22、若所述两者夹角为直角,则所述中控器调整所述第一无人机群移动方向为所述辐射扩散方向和所述辐射预测方向所夹的中间方向;
23、若所述两者夹角为钝角,则所述中控器调整所述第一无人机群移动方向为所述辐射扩散方向。
24、进一步地,所述第二类无人机还能够向所述第一无人机群传输移动信号调整所述第一无人机群的高度或位置。
25、进一步地,在所述中控器无法接收到所述第一类无人机传输的所述检测结果的状态下,所述第一类无人机对应的所述第二类无人机开始接收所述第一类无人机传输的所述检测结果,其中,
26、若所述第二类无人机无法接收到所述第一类无人机传输的所述检测结果,则发送失联信号至所述中控器;
27、若所述第二类无人机接收到所述第一类无人机传输的所述检测结果,则所述第二类无人机将接收到的所述检测结果传输至所述控制器。
28、进一步地,所述第一类无人机上设置熔断装置,在所述第一类无人机接受辐射值超过辐射设定值的状态下,所述熔断装置发生熔断,所述第一类无人机自动返航并发送返航信号至对应的第二类无人机;
29、其中,所述辐射设定值与无人机本身耐辐射性能呈正相关。
30、进一步地,所述第二类无人机将接收到的所述返航信号的数量与发出的所述失联信号汇总得到丢失数量,根据预设数量确定所述第二类无人机对应所述第一类无人机数量是否满足监测要求,其中,
31、若所述丢失数量小于所述预设数量,则所述第二类无人机判定正常;
32、若所述丢失数量不小于所述预设数量,则所述第二类无人机判定其对应的若干所述第一类无人机无法满足监测要求,此时所述中控器重新发射出所述丢失数量的所述;
33、其中,所述预设数量与单只所述第二类无人机对应的所述第一类无人机数量呈正相关。
34、进一步地,在所述中控器无法接收到所述第二类无人机传输的信号且能够接收到所述第二类无人机对应若干所述第一类无人机传输的信号的状态下,所述中控器将所述第二类无人机对应若干所述第一类无人机连接至相邻最近的所述第二类无人机。
35、与现有技术相比,本发明的有益效果在于,本发明的系统利用设置两种无人机群的方式,通过对辐射地区辐射值和气流情况的收集,对若干第一类无人机进行位置分类,同时根据辐射地区的风速对第二类无人机的高度进行调整,减少第二类无人机受到的辐射干扰,综合第一类无人机的位置随时间的变化模拟出辐射扩散方向,综合地形图像和风向模拟出辐射预测方向,结合辐射扩散方向和辐射预测方向调整第一类无人机移动方向,在有效地监测辐射扩散程度的同时,更准确地预测出辐射进一步扩散的方向,即时对无人机位置进行调整,利于延长无人机监测时长,降低无人机因辐射造成的损耗,在有效地提高了无人机监测辐射程度的准确性的同时,有效提升了基于无人机的环境监测系统的安全性和实用性。
36、进一步地,通过第二类无人机与第一类无人机的通讯,在中控器无法接收到第一类无人机的信号时,将第二类无人机作为通讯中转站,有针对性地加强了无人机与中控器间的信号传输,同时在第一类无人机或第二类无人机因辐射发生故障时,设置有效措施保障监测的持续进行,利用设置熔断装置在第一类无人机因辐射发生故障时能够对其进行回收,在有效地减少无人机消耗的同时,进一步提升了基于无人机的环境监测系统的安全性和实用性。
- 还没有人留言评论。精彩留言会获得点赞!