一种高分辨柔性触觉传感阵列及其制备方法和应用
本发明属于柔性传感器,具体涉及一种高分辨柔性触觉传感阵列及其制备方法和应用。
背景技术:
1、触觉传感器可以模拟人体的触觉感知功能,将外界环境刺激转化为电信号,从而进行处理与分析。通过将触觉传感器与假肢、智能机械手、可穿戴式设备等产品进行集成,可以使其获取更为丰富的环境信息并准确的做出反馈,可以大大提升上述设备的智能化程度,丰富它们的使用场景。随着人工智能、物联网等产业的快速发展,触觉传感器作为上述这些产品实现信息化、数字化、智能化的关键部件,成为了各国科技竞争的一项核心关键技术。
2、日常生活中的物体通常具有不规则的曲面,传统刚性传感器受其材质的影响,无法与被测物体紧密贴合,这会对测量精度产生显著的影响,难以适用于机器人电子皮肤、可穿戴设备等应用,因此需要发展可与复杂曲面有良好共形能力的柔性触觉传感器。此外,触觉感知往往是包含丰富接触信息的面感知,这对触觉传感阵列各单元的灵敏度、响应时间、空间分辨率、单元性能一致性提出了极高的要求,然而目前的柔性触觉传感器受制备工艺的限制,难以兼顾上述要求。这是因为在制备高密度阵列柔性触觉传感器的过程中,为了提高传感器的性能,常常需要制备出微米级的三维结构,但是现有的光刻工艺虽然加工精度高、一致性好,但其成本高、速度慢,而且光刻胶会导致环境污染;另一种常用的利用砂纸、食盐、糖、动植物纹理等模板制备的微结构,虽然成本低、速度快,但微结构具有不规则性,难以保证各传感单元之间的一致性和稳定性,且重复性较差,也难以实现批量制备。
3、此外,为使机器人、可穿戴设备等获得与人类相媲美的触觉感知能力,实现高精度图案识别、物体形状识别等任务,需要柔性触觉传感阵列具备高空间分辨率。提高传感器空间分辨率最直接的方式是减小传感单元尺寸,提高阵列密度。但随着阵列密度的提高及传感器阵列数量的增加,一方面,在集成过程中离散的敏感材料单元难以与电极图案批量实现高精度对位集成;另一方面,由于传感器在按压过程中柔性材料会发生变形,导致相邻传感单元会因为形变产生串扰信号,且阵列密度越高串扰效应会越显著。当前商用的柔性触觉传感阵列集成密度低,且受集成工艺的限制,通常使用一整片敏感材料覆盖所有电极图案,或是通过条形敏感材料覆盖一行电极图案,串扰效应明显,导致空间分辨率低,无法满足高精度图案识别、物体形状识别等高难度任务。因此,迫切需要发展新型高密度阵列式柔性触觉传感器的加工与集成工艺,实现高可靠、高分辨、低串扰的柔性触觉传感阵列的稳定制备。
技术实现思路
1、为了解决现有技术存在的以上问题,本发明提供了一种高分辨柔性触觉传感阵列及其制备方法和应用。
2、本发明所述柔性触觉传感阵列的结构设计,在受力时,能够实现将外部压力聚集到被按压单元,而对未受压单元进行力屏蔽,从而大幅减少信号串扰,提高传感器的分辨率。本发明所述方法通过超快激光烧蚀,可以在电极材料、压敏材料上制备具有高度一致性的微圆锥、微圆顶等微结构,有效提高传感单元压力检测的灵敏度和响应时间,与传统光刻、模板法制备微结构相比,本发明具有一致性好、速度快,易大面积批量制备等优点。本发明所述方法可以利用不同材料的粘度差异,实现微米级敏感材料单元的批量化转移和对准,解决现有柔性传感阵列集成密度低的问题。本发明所述方法具有很强的通用性,可适用于不同传感单元数量、尺寸、形状以及阵列密度的柔性触觉传感器制备,特别是在高密度阵列触觉传感器上具有明显优势。
3、本发明所采用的技术方案为:
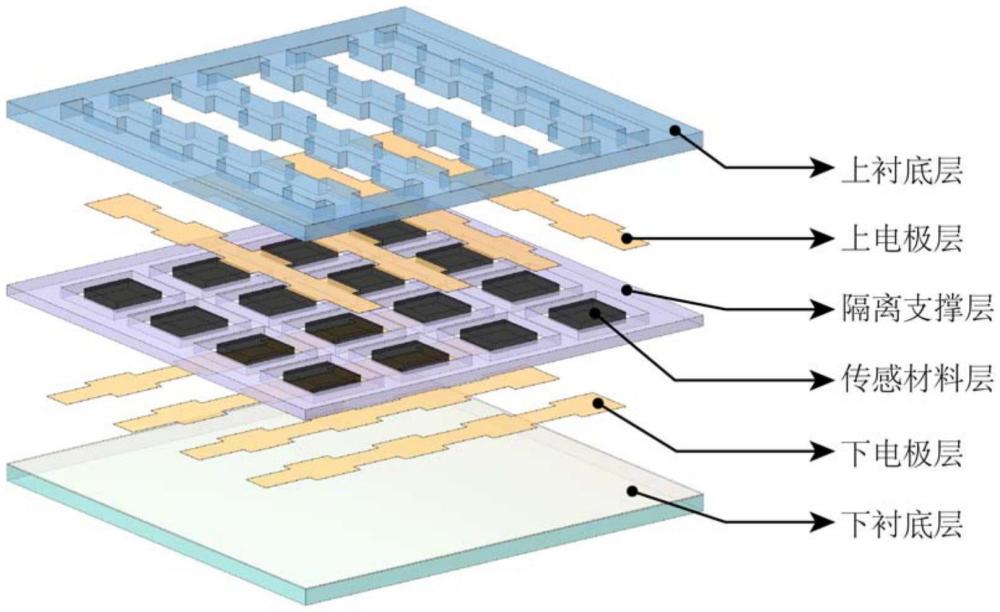
4、一种高分辨柔性触觉传感阵列,结构包括:
5、下衬底层和上衬底层,所述下衬底层和上衬底层分别位于传感阵列的两侧,所述下衬底层的第二表面和上衬底层的第二表面均设置有微结构阵列;
6、下电极层和上电极层,所述下电极层的第一表面和所述下衬底层的第二表面连接,所述上电极层的第一表面与所述上衬底层的第二表面连接;所述下电极层和上电极层呈行列交错设置,用于采集传感层受压后产生的电流变化信号;
7、传感材料层和隔离支撑层,所述传感材料层和隔离支撑层位于所述下电极层的第二表面和所述上电极层的第二表面之间,所述传感材料层嵌设于所述隔离支撑层。
8、所述下衬底层和上衬底层均为柔性衬底材料;
9、所述下衬底层的第二表面和上衬底层的第二表面均设置有微结构阵列;
10、优选地,所述柔性衬底材料为pet、pdms、pi、tpu中的任意一种或几种的复合。
11、所述下电极层和上电极层均为金属电极材料;优选地,所述金属电极材料为au、ag、cu、al、ti、pt等金属材料中的任意一种或几种的组合。
12、所述隔离支撑层为有机高分子材料,所述有机高分子材料可以为pi、pet、tpu、pdms等中的任意一种或几种的组合;优选地,所述隔离支撑层为pi;
13、所述传感材料层采用聚合物基压阻复合材料,所述聚合物基压阻复合材料由有机聚合物基体和掺杂导电填料组成;优选地,有机聚合物基体为pdms、tpu、pi、pet中的任意一种或几种的组合;所述掺杂导电填料为cnts、agnws、cb等材料中的任意一种或几种的组合。
14、所述的高分辨柔性触觉传感阵列的制备方法,包括如下步骤:
15、(1)柔性微结构电极:
16、a、将柔性衬底材料的表面、对应电极部位之外的部分保持为不连续,并加工为镂空结构;
17、b、在步骤a所得具有镂空结构的柔性衬底材料上制备图案化金属电极,作为触觉传感阵列的上电极;
18、c、另取柔性衬底材料,并在柔性衬底材料上制备图案化金属电极,作为触觉触感阵列的下电极;所述下电极层和上电极层呈行列交错设置;
19、(2)柔性触觉传感阵列的集成:
20、d、取压阻复合材料,加工制得传感材料层;
21、e、将所述传感材料层与步骤d所述下电极进行复合,得到复合有传感材料层的下电极;
22、f、取有机高分子材料,加工为镂空网格结构作为隔离支撑层;
23、g、将复合有传感材料层的下电极与所述隔离支撑层进行复合;
24、h、将复合有传感材料层和隔离支撑层的下电极与所述上电极进行复合,即得所述高分辨柔性触觉传感阵列。
25、步骤a中,在柔性衬底材料的表面对应电极部位,先加工制得微结构阵列;
26、所述微结构阵列为微圆锥阵列结构、微棱台阵列结构、微圆顶阵列结构中的一种或几种的组合;优选地,所述微结构阵列为微圆锥阵列结构。
27、所述微结构阵列的加工工艺为:
28、在柔性衬底材料的表面对应电极部位,采用飞秒激光进行烧蚀,激光功率为1.5-2w,扫描次数为20-30次,扫描速度为400mm/s-600mm/s,横、纵网格间距为20-30μm。
29、本发明通过超快激光烧蚀,在衬底材料上制备具有高度一致性的微圆锥、微圆顶等微结构,可使得传感器在受压过程中,电极与敏感材料间的接触面积快速增加,从而有效提高柔性触觉传感器的灵敏度和响应时间;与传统光刻、模板法制备微结构相比,本发明具有一致性好、速度快,易大面积批量制备等优点。
30、步骤a中,所述镂空结构的加工工艺为:
31、在柔性衬底材料的表面对应电极之外的部位,采用飞秒激光进行烧蚀,激光功率为2-3w,扫描次数为100-200次,扫描速度为100-200mm/s。制备所得的镂空结构可以有效减弱柔性衬底变形带来的串扰问题。
32、步骤b中或步骤c中,所述金属电极采用磁控溅射工艺制备;
33、所述磁控溅射的具体工艺步骤为:
34、调整氩气流量直至溅射腔室内气压稳定在2pa,将电极材料靶的直流溅射功率设定为30-100w,溅射时长为30-120min,制备出金属电极。
35、步骤g中,所述传感材料层嵌设于所述隔离支撑层中;
36、所述隔离支撑层的加工步骤具体如下:
37、取有机高分子材料,对应传感材料层的部位,采用飞秒激光进行裁切,激光功率为2-4w,扫描次数为200-500次,扫描速度为100-200mm/s。
38、本技术发明人在长期研究中发现,对于柔性触觉传感阵列,由于在按压过程中柔性材料的变形,使得非受压传感单元也会产生压力响应信号。随着传感器阵列密度的增加,这种因柔性材料变形导致的机械串扰效应会越来越严重。目前商用传感器为了克服机械串扰效应,只能减小传感器的阵列密度,导致传感器的空间分辨率低。本发明提出的传感器结构设计可以将压力聚集在受压传感单元上,而减小非受压传感单元的形变,从而减小了机械信号串扰,提高了传感器的空间分辨率。
39、所述的高分辨柔性触觉传感阵列在智能机器人和柔性可穿戴设备中的应用。
40、本发明具体如下有益效果:
41、本发明所述的高灵敏高分辨快速响应柔性触觉传感阵列,结构包括下衬底层和上衬底层、下电极层和上电极层、传感材料层和隔离支撑层;所述下衬底层和上衬底层分别位于传感阵列的两侧,所述下电极层的第一表面和所述下衬底层的第二表面连接,所述上电极层的第一表面与所述上衬底层的第二表面连接;所述下电极层和上电极层呈行列交错设置,用于采集传感层受压后产生的电流变化信号;所述传感材料层和所述隔离支撑层位于所述下电极层的第二表面和所述上电极层的第二表面之间;本发明所述柔性触觉传感阵列的结构设计,一方面能够实现传感受压时,将压力聚集在受压传感单元上,而对非受压单元进行力隔离,从而减小因柔性材料变形而产生的机械串扰。另一方面,独立的敏感材料单元还能够减小传感阵列中的电学信号串扰;在上述两个方面的共同作用下,可有效提高柔性触觉传感阵列的空间分辨率。
- 还没有人留言评论。精彩留言会获得点赞!