基于卷积神经网络的雷达单目标检测方法、系统和设备
本发明涉及雷达目标检测,尤其涉及基于卷积神经网络的雷达单目标检测方法、系统和设备。
背景技术:
1、神经网络是一个高度复杂的非线性学习系统,可用于预测建模、自适应控制和通过数据集进行训练。人工神经网络已被成功应用于自主机器人、雷达与通信等领域的语音识别、图像分析和自适应控制。常见的神经网络有bp神经网络、径向基神经网络、感知器神经网络、自组织神经网络和反馈神经网络等。深度卷积神经网络(deep convolutionalneural network,dcnn)是一种特殊的神经网络,它由多个卷积层、池化层和全连接层组成。这种网络结构在处理图像和视频等高维数据时表现出色,因为其具有自动学习图像特征的能力。lenet-5模型是深度卷积神经网络的开山鼻祖,它被广泛应用于手写数字识别等任务。alexnet模型是深度卷积神经网络的奠基之作,它引领了深度学习领域的新一轮发展;vgg和googlenet/inception、yolo、resnet等模型的设计思想和网络结构都有所不同,但都对卷积神经网络的发展做出了重要贡献。
2、雷达目标检测是雷达系统的核心功能之一,其任务是通过对接收到的信号进行处理,提取出目标的位置、速度、形状等特征,实现对目标的识别和跟踪。为了解决这些问题,研究者们提出了许多雷达目标检测算法,如恒虚警率检测算法、复杂环境下的目标检测、海面目标检测算法、被动多基地雷达的目标检测方法以及基于fda阵列的合作目标检测方法。此外,随着人工智能和机器学习技术的发展,研究者们也开始将深度学习等神经网络技术应用于雷达目标检测中,取得了较好的效果。
3、苏宁远等人从信号预测和特征分类两个角度,分别采用长短时记忆网络(lstm)和卷积神经网络(cnn)对信号时间序列幅度信息进行处理,用于海上目标一维序列雷达信号检测,该方法不需事先假设背景统计特性,泛化能力更强。刘军伟等人提出基于条件生成对抗网络的深度学习雷达目标检测方法,取得了很好的检测效果。chen xiaolong等人设计了双通道卷积神经网络检测器从回波单元的幅度序列和时频谱图中联合提取幅度特征和时频特征以提升检测器性能,且虚警可控。wang jin gang等人设计了基于注意力机制的海上目标检测器,从回波中提取目标和杂波高维差异特征实现检测。chen simin将回波单元的相位转换为图后利用图卷积神经网络实现目标检测。王治飞等人利用回波帧与帧之间的数据特征,利用深度学习从而实现雷达的目标检测。为了利用目标和杂波的序列特征差异增强检测性能,wan hao提出了一种基于lstm网络的检测方法。wangyumiao利用复值unet网络实现虚警率可控的海表面小目标目标检测方法。
4、虽然上述方法均可以实现雷达的单目标检测,但是由于网络结构的复杂性,使得深度学习模型的推断时间可能较长,在进行雷达目标检测时可能面临实时性不足的问题,而雷达系统对实时性要求极高,这势必会影响雷达系统的响应速度和实时决策能力;此外,上述方法中检测和估计是分离的,无法同步实现雷达的目标检测和估计,会导致目标检测和估计所需的总时间较长。
技术实现思路
1、针对上述存在的问题,本发明旨在提供一种基于卷积神经网络的雷达单目标检测方法、系统和设备,对雷达回波数据进行正交相位检波处理后,利用多层二维卷积结构的cnn进行雷达单目标的检测和目标距离的估计,在准确率和实时性等方面存在明显的优势。
2、为了实现上述目的,本发明所采用的技术方案如下:
3、基于卷积神经网络的雷达单目标检测方法,包括以下步骤:
4、s1:对雷达回波数据进行预处理,得到目标的一维快时间距离序列;
5、s2:构建用于检测雷达单目标的卷积神经网络,并进行训练;
6、s3:利用步骤s2中训练好的网络参数对步骤s1中预处理后的数据进行目标检测和距离参数估值。
7、进一步的,步骤s1的具体操作包括以下步骤:
8、s101:建立雷达发射信号遇到目标后的返回信号模型;
9、s102:对雷达的返回信号进行下变频处理,然后再进行正交相位检波,得到回波信号模型,也即目标的一维快时间距离序列。
10、进一步的,步骤s102中所述的回波信号模型表示为
11、x′(t)=x(t)+n(t)
12、其中,x′(t)为回波信号,n(t)为噪声;a为回波的幅度;u(t-tr)为回波信号的延迟;为目标导致的时延,rt为为目标距离,c为光速;为目标的多普勒频率,vr为目标径向速度,λ为雷达工作波长。
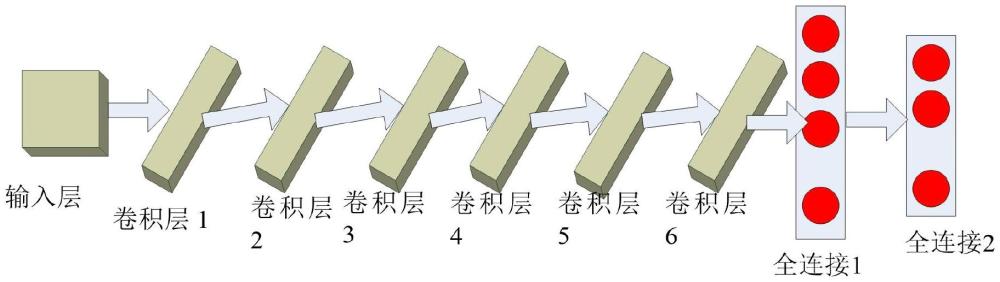
13、进一步的,步骤s2中所述的卷积神经网络包括六层卷积层和两层全连接层,每个卷积层有256个卷积核,前两个卷积层卷积核大小为3×3,后四个卷积层卷积核大小为2×2,每个卷积层后面是一个批量规范化层和一个relu层;在所有卷积层之后,是两个全连接层,在第一个全连接层后是relu激活函数和dropput层,第二个全连接层后用sigmoid激活函数诱导分类概率并输出。
14、进一步的,所述卷积神经网络的卷积层网络参数为其中we表示维度为ce×fe×fe×ne的卷积核,ce表示输入通道数,fe表示卷积核的长和宽,ne表示卷积核的个数,也即输出通道数,be表示维度为ne的偏置向量。
15、进一步的,所述卷积神经网络的全连接层的网络参数为其中,w0f表示维度为cf×nf的权值矩阵,cf表示输入通道数,nf表示全连接层神经元的个数,也即输出通道数,b0f表示维度为nf的偏置向量。
16、进一步的,所述卷积神经网络的输入数据和输出的标签对表示为
17、dtrain={(k1,y1),(k2,y2),…,(kl,yl)}
18、其中,y表示训练样本容量网络输入,k为标签,l为样本数,若检测到有目标存在,则k为零一矢量,且非零元素的位置即为目标距离,若检测没有目标,则k为全零矢量。
19、进一步的,本发明还包括基于卷积神经网络的雷达单目标检测系统,所述检测系统包括雷达数据预处理模块和卷积神经网络模块,所述雷达数据预处理模块用于对雷达回波数据进行预处理,得到目标的一维快时间距离序列,所述卷积神经网络模块用于对雷达单目标进行检测;
20、所述雷达数据预处理模块和卷积神经网络模块基于如前所述的检测方法实现。
21、进一步的,本发明还包括一种电子设备,所述电子设备包括至少一个处理器;以及与所述处理器通信连接的存储器;其中,所述存储器存储有可被所述处理器执行的指令,所述指令被所述处理器执行,以使所述处理器能够执如前所述的检测方法。
22、本发明的有益效果是:
23、1、本文提出了一种基于卷积神经网络的雷达单目标检测方法,首先对雷达回波数据进行预处理,包括正交相位检波脉压等得到目标的一维快时间距离序列。然后将其适当变形作为输入数据图像,并将全零矢量和零一矢量作为输出标签进行分类训练。利用卷积神经网络进行训练,并适当调整超参数,使得输入与输出标签误差满足要求,得到训练网络参数。最后利用该网络参数对接收数据进行目标检测和距离参数估值。本发明中对该雷达目标检测方法进行了实验验证,结果表明,该方法在雷达目标检测方面具有较高的性能,能够自动学习图像中的特征,避免手工提取特征的繁琐和主观性。同时,该方法还能够提高雷达目标检测的准确率和召回率,以及实时性。因此,该方法具有广泛的应用前景,可以为雷达系统提供更准确、更快速的目标检测能力。
24、2、本发明中的雷达目标单目标检测方法能够同时实现雷达目标的检测和估计,大大节省了目标检测和估计的总时间,精度也得到了相应的提高。
- 还没有人留言评论。精彩留言会获得点赞!