太阳方位确定方法及装置与流程
本发明涉及数据处理,具体涉及一种太阳方位确定方法、装置、计算机设备、存储介质及程序产品。
背景技术:
1、太阳敏感器作为航空航天领域内至关重要的光学姿态敏感器,其核心功能在于通过精确感知太阳矢量的方位,确定太阳在航天器星体坐标系统中的位置,进而为航天器的轨道控制和姿态控制提供关键导航信息。这一技术不仅保障了航天器在复杂太空环境中的稳定运行,还对于保护高精度仪器(如星敏感器、地球敏感器)免受异常姿态影响至关重要。此外,太阳敏感器还承担着为航天器太阳帆板定位提供基准信号的重要任务,确保了航天器能源系统的高效运作。
2、当前,太阳敏感器主要分为单孔型、窄缝型。单孔型和窄缝型太阳敏感器利用小孔成像原理,通过直接解算成像点与单孔/窄缝的相对位置,来推断航天器相对于太阳的方位信息。
3、然而,这类方法虽然结构简单,但受限于小孔成像的局限性,其精度往往不高,且视场角较小,难以满足高精度的应用需求。
技术实现思路
1、有鉴于此,本发明提供了一种太阳方位确定方法、装置、计算机设备、存储介质及程序产品,以解决单孔型、窄缝型的太阳敏感器受限于小孔成像的局限性,其精度往往不高,且视场角较小,难以满足高精度、大视场的应用需求的问题。
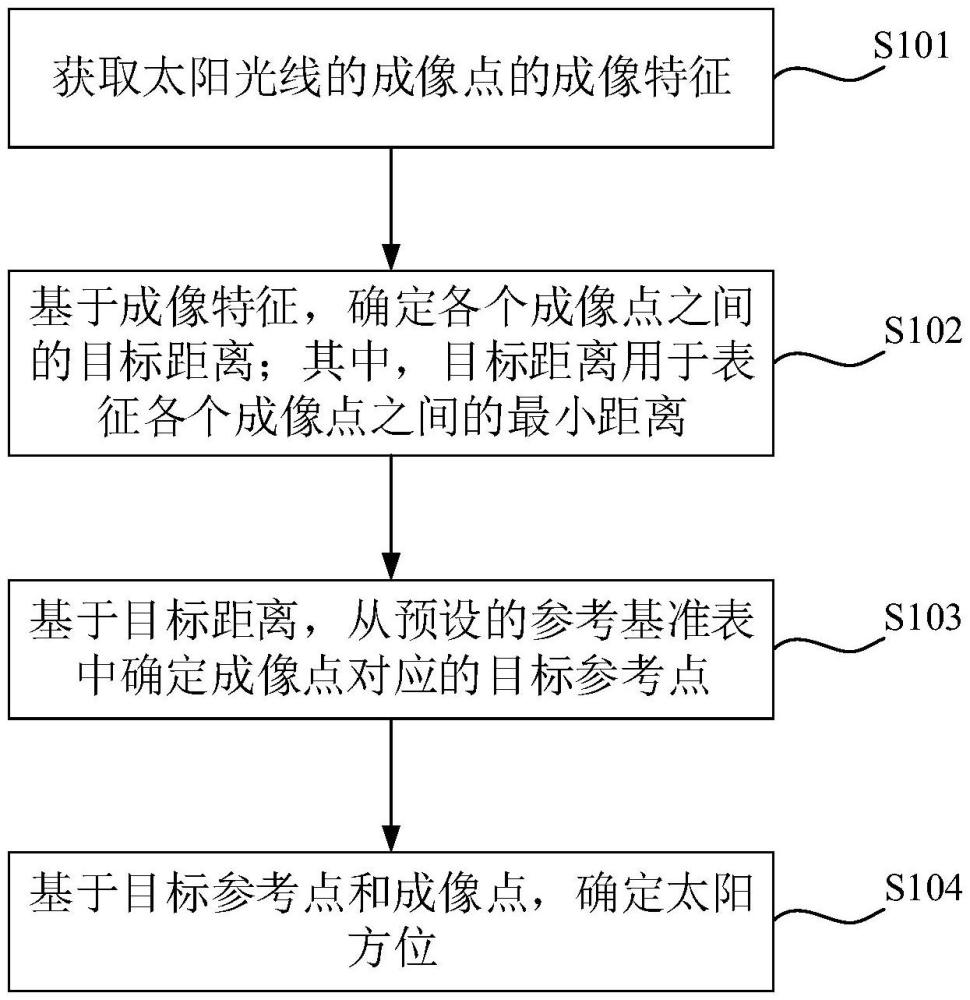
2、第一方面,本发明提供了一种太阳方位确定方法,包括:获取太阳光线的成像点的成像特征;基于成像特征,确定各个成像点之间的目标距离;其中,目标距离用于表征各个成像点之间的最小距离;基于目标距离,从预设的参考基准表中确定成像点对应的目标参考点;基于目标参考点和成像点,确定太阳方位。
3、本实施例提供的太阳方位确定方法,通过详细分析太阳光线的成像特征,可以更精确地确定成像点的位置,减少因小孔成像原理带来的模糊性和误差。利用预设的参考基准表,将成像点映射到更精确的目标参考点上。这种映射关系可以基于大量的实验数据和校准结果,从而显著提高方位推断的精度。并且,通过同时分析多个成像点的位置和特征,可以覆盖更广泛的视场范围。这种方法不再局限于单一小孔或窄缝的视野,从而有效扩大视场角。
4、在一个可选的实施方式中,构建预设的参考基准表的过程,包括:获取掩膜的参考点和参考点的编号;其中,参考点包括:锚点和游标,游标用于指示单一孔径的点,锚点用于指示多个孔径组合的点;分别确定锚点的孔径中心和游标的孔径中心;基于锚点的孔径中心和游标的孔径中心,确定锚点和游标之间的最小距离;以锚点和游标之间的最小距离为第一最小基数,确定相邻参考点之间的比例;基于参考点的编号和相邻参考点之间的比例,构建预设的参考基准表。
5、本实施例提供的太阳方位确定方法,通过定义锚点和游标作为参考点,能够更精确地指示成像的关键点。锚点对应多个孔径组合的点,提供了更稳定的定位基准;而游标则针对单一孔径的点,能够捕捉到更细微的位置变化。这种结合使得系统能够同时处理宏观和微观的定位需求,从而提高整体定位精度。并且,通过每个参考点的编号和相邻参考点之间的比例,能够准确地确定每个参考点的位置,进而使得预设的参考基准表更准确。
6、在一个可选的实施方式中,参考点的编号包括:行参考点编号和列参考点编号;其中,基于参考点的编号和相邻参考点之间的比例,构建预设的参考基准表,包括:基于行参考点编号和相邻参考点之间的比例,确定行排列的参考点对应的第一参考基准表;基于列参考点编号和相邻参考点之间的比例,确定列排列的参考点对应的第二参考基准表;基于第一参考基准表和第二参考基准表,构建预设的参考基准表。
7、本实施例提供的太阳方位确定方法,通过将参考点分为行参考点和列参考点的方式,能够对参考点进行更一步地划分,从而在使用预设的参考基准表,能够更准确地确定参考点对应的成像点。
8、在一个可选的实施方式中,成像特征包括:质心坐标;其中,基于成像特征,确定各个成像点之间的目标距离,包括:基于各个成像点的质心坐标,确定各个成像点之间的距离;比对各个成像点之间的距离,确定目标距离。
9、本实施例提供的太阳方位确定方法,质心坐标是通过计算成像点内所有像素的灰度值或亮度值的加权中心得到的,这一过程充分考虑了成像点的整体分布特性。因此,基于质心坐标计算得到的距离更加准确,能够减少因成像点形状不规则或亮度分布不均引起的误差。此外,通过确定每两个成像点之间的距离,然后从所有距离中确定目标距离的方式,能够提高目标距离确定的准确性。
10、在一个可选的实施方式中,成像特征至少包括:像点面积;其中,基于目标距离,从预设的参考基准表中确定成像点对应的目标参考点,包括:基于像点面积,确定成像点中的锚点对应的第一成像点和游标对应的第二成像点;其中,第一成像点的面积大于第二成像点的面积;以目标距离作为第二最小基数,确定行排列的成像点之间的比例和列排列的成像点之间的比例;基于第一成像点、第二成像点和行排列的成像点之间的比例,从预设的参考基准表中确定第一目标比例;基于第一成像点、第二成像点和基于列排列的成像点之间的比例,从预设的参考基准表中确定第二目标比例;基于第一目标比例,确定行排列的各个第一参考点;基于第二目标比例,确定列排列的各个第二参考点;将第一参考点和第二参考点作为目标参考点。
11、本实施例提供的太阳方位确定方法,通过像点面积的差异,可以有效地区分锚点和游标对应的成像点。锚点通常对应较大的成像面积,而游标则对应较小的成像面积。这种区分使得系统能够更准确地识别不同类型的成像点,从而提高后续处理的准确性。
12、此外,以目标距离作为第二最小基数,确定行排列和列排列的成像点之间的比例关系,能够根据不同成像条件灵活调整比例关系,从而与预设的参考基准表相对应,进而准确地确定成像点对应的参考点。
13、另外,结合目标距离和像点面积,可以从预设的参考基准表中更精确地定位目标参考点。这不仅提高了系统的响应速度,还减少了因错误匹配而引入的误差。
14、在一个可选的实施方式中,该方法还包括:获取锚点中多个孔径之间的最小距离、掩膜和成像平面之间的距离;检测锚点中多个孔径之间的最小距离、锚点和游标之间的最小距离之间是否满足第一预设条件,掩膜和成像平面之间的距离、锚点中多个孔径之间的最小距离之间是否满足第二预设条件,掩膜和成像平面之间的距离是否满足第三预设条件;若锚点中多个孔径之间的最小距离、锚点和游标之间的最小距离之间满足第一预设条件,掩膜和成像平面之间的距离、锚点中多个孔径之间的最小距离之间满足第二预设条件,掩膜和成像平面之间的距离满足第三预设条件,则判定预设的参考基准表合格。
15、本实施例提供的太阳方位确定方法,通过设置第一、第二和第三预设条件,对多个关键参数进行多重校验。这种多重校验机制可以显著提高系统的可靠性,确保在复杂多变的观测条件下,仍然能够准确地确定成像点对应的目标参考点。
16、第二方面,本发明提供了一种太阳方位确定装置,该装置包括:获取模块,用于获取太阳光线的成像点的成像特征;第一确定模块,用于基于成像特征,确定各个成像点之间的目标距离;其中,目标距离用于表征各个成像点之间的最小距离;第二确定模块,用于基于目标距离,从预设的参考基准表中确定成像点对应的目标参考点;第三确定模块,用于基于目标参考点和成像点,确定太阳方位。
17、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的太阳方位确定方法。
18、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的太阳方位确定方法。
19、第五方面,本发明提供了一种计算机程序产品,包括计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的太阳方位确定方法。
- 还没有人留言评论。精彩留言会获得点赞!