本发明涉及车路协同,尤其涉及一种路侧雷达位置识别方法及装置。
背景技术:
1、在智能交通系统中,路侧雷达系统是实现车路协同的关键技术之一,它们通过实时收集车辆的位置、速度和流量信息,为交通管理和决策提供支持,被广泛用于监测交通流量、检测交通事件、以及提供有关道路使用情况的数据。路侧雷达的精确标定是实现其在实际应用中高效协同感知的前提条件。当前的标定方法存在局限性:一些方法依赖于gps信号来提供雷达的初始定位信息,而另一些方法则仅关注于传感器之间的标定。在实际应用中,为每个雷达系统配备gps信号不仅会增加人力资源的消耗,而且仅进行传感器间的标定可能无法满足所有场景的需求。因此,开发一种能够自动完成路侧雷达位置识别的方法显得尤为迫切。
技术实现思路
1、本发明提供了一种路侧雷达位置识别方法及装置,以解决路侧雷达标定过程中初值难以确定的问题。
2、根据本发明的一方面,提供了一种路侧雷达位置识别方法,包括:
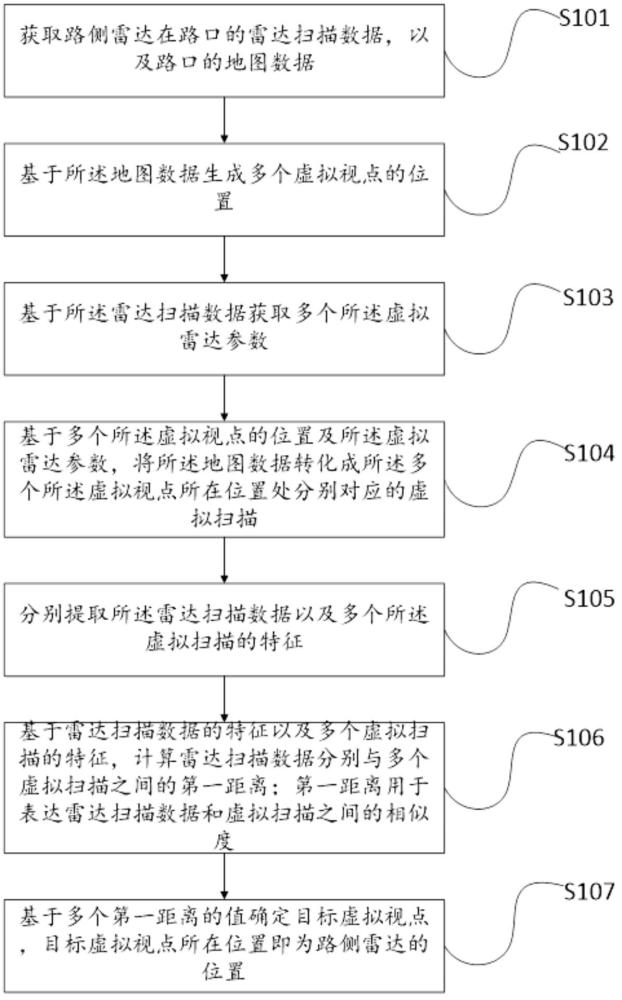
3、获取路侧雷达在路口的雷达扫描数据,以及路口的地图数据;
4、基于所述地图数据生成多个虚拟视点的位置;
5、基于所述雷达扫描数据获取虚拟雷达参数;
6、基于多个所述虚拟视点的位置及所述虚拟雷达参数,将所述地图数据转化成所述多个所述虚拟视点所在位置处分别对应的虚拟扫描;
7、分别提取所述雷达扫描数据以及多个所述虚拟扫描的特征;
8、基于所述雷达扫描数据的特征以及多个所述虚拟扫描的特征,计算所述雷达扫描数据分别与多个所述虚拟扫描之间的第一距离;所述第一距离用于表达雷达扫描数据和虚拟扫描之间的相似度;
9、基于多个所述第一距离的值确定目标虚拟视点,所述目标虚拟视点所在位置即为路侧雷达的位置。
10、可选的,所述基于所述地图数据生成多个虚拟视点的位置,包括:
11、获取所述地图数据中每条道路的向量组;
12、对所述向量组中的每条向量进行线性插值,每条向量上均生成多个所述虚拟视点。
13、可选的,所述获取所述地图数据中每条道路的向量组,包括:
14、
15、其中,ri表示第i条道路的向量组,vi,j表示组成第i条道路的向量组中的第j个向量,ni表示第i条道路上的坐标点数,pi,j表示第i条道路上的第j个坐标点;
16、所述对所述向量组中的每条向量进行线性插值,每条向量上均生成多个所述虚拟视点,包括:
17、
18、其中,pi(k)表示第i条道路上的第j个向量上生成的第k个虚拟视点,m表示的第j个向量上希望生成的虚拟视点数量,表示第i条道路中第j个向量的起始点,表示第i条道路中第j个向量的终止点。
19、可选的,所述基于所述雷达扫描数据获取虚拟雷达参数,包括:
20、计算所述雷达扫描数据中每个点到路侧雷达的第二距离、第一水平角度以及第一垂直角度;
21、基于所述第一垂直角度的数量获取所述虚拟雷达线数;
22、基于每个点的第二距离获取所述虚拟雷达的测量范围;
23、基于每个点的所述第一水平角度以及所述第一垂直角度获取所述虚拟雷达的水平角度间隔以及垂直角度间隔;
24、以最大和最小的所述垂直角度间隔作为所述虚拟雷达的垂直视场角;
25、基于所述垂直角度间隔以及以及所述雷达线束计算虚拟雷达激光射线的垂直角集合,基于所述水平角度间隔计算所述虚拟雷达激光射线的水平角集合。
26、可选的,所述基于多个所述虚拟视点的位置及所述虚拟雷达参数,将所述地图数据转化成所述多个所述虚拟视点所在位置处分别对应的虚拟扫描,包括:
27、基于所述虚拟视点的位置及参数对所述地图数据进行裁剪;
28、计算裁剪后的所述地图数据中每个点到所述虚拟视点的第三距离、第二水平角度和第二垂直角度;
29、若所述第二水平角度属于所述水平角集合,并且所述第二垂直角度属于所述垂直集合,则保留所述第二水平角度对应的点;
30、保留所述地图数据中距离所述虚拟视点最近的点,得到所述虚拟视点对应的所述虚拟扫描,进而得到多个所述虚拟视点对应的多个所述虚拟扫描。
31、可选的,所述分别提取所述雷达扫描数据以及多个所述虚拟扫描的特征,包括:
32、分别对所述雷达扫描数据以及多个所述虚拟扫描的点云数据,按照水平方向、水平角度以及垂直角度进行分箱;
33、对每个箱中的点进行编码;
34、通过累计统一横截面中所有箱的编码函数,计算得到点云的特征描述符,所述特征描述符包括分别沿不同水平方向以及不同水平角度的所有箱对应的特征。
35、可选的,所述对每个箱中的点进行编码,包括:
36、
37、式中,pi,j,k表示箱中点的集合,nr表示沿水平方向的箱数,nh表示水平角度的箱数,nv表示垂直角度的箱数;表示对应集合中点的数量,nth表示数量阈值;表示编码函数,表示判断函数;
38、所述通过累计统一横截面中所有箱的编码函数,计算得到点云的特征描述符,包括:
39、
40、fij表示沿第i个水平方向、第j个水平角度上所有箱对应的特征,f表示整个点云的特征描述符。
41、可选的,所述基于所述雷达扫描数据的特征以及多个所述虚拟扫描的特征,计算所述雷达扫描数据分别与多个所述虚拟扫描之间的第一距离,包括:
42、
43、式中,和分别表示所述雷达扫描数据以及多个所述虚拟扫描的所述特征描述符的列数;disi表示所述虚拟扫描向右移动i 列后与所述雷达扫描数据之间的距离,dis表示所述虚拟扫描与所述雷达扫描数据之间的所述第一距离,g(i,j)表示所述特征描述符中第j 列向右移动i 列后的索引;表示所述虚拟扫描的所述特征描述符第g(i,j)列的数据,表示所述雷达扫描数据的特征描述符第j列的数据。
44、可选的,所述基于多个所述第一距离的值确定目标虚拟视点,所述目标虚拟视点所在位置即为路侧雷达的位置,包括:
45、将多个所述第一距离进行排序,获取前k个候选虚拟视点;
46、将所述候选虚拟视点分为多个簇,计算每个簇中各元素之间的第四距离;
47、基于所述第一距离以及所述第四距离构建距离矩阵;所述距离矩阵的第一行中各元素为所述雷达扫描数据分别与前k个候选虚拟视点的所述虚拟扫描之间的第一距离,除第一行外的其他行为前k个候选虚拟视点的所述虚拟扫描中任意两个所述虚拟扫描之间的第四距离;
48、计算所述距离矩阵中每一行与第一行之间的第五距离,根据所述第五距离最短的那一行所对应的所述虚拟扫描来确定所述目标虚拟视点。
49、根据本发明的另一方面,提供了一种路侧雷达位置识别装置,包括:
50、第一获取单元,用于获取路侧雷达在路口的雷达扫描数据,以及路口的地图数据;
51、生成单元,用于基于所述地图数据生成多个虚拟视点的位置;
52、第二获取单元,用于基于所述雷达扫描数据获取虚拟雷达参数;
53、转化单元,用于基于多个所述虚拟视点的位置及所述虚拟雷达参数,将所述地图数据转化成所述多个所述虚拟视点所在位置处分别对应的虚拟扫描;
54、提取单元,用于分别提取所述雷达扫描数据以及多个所述虚拟扫描的特征;
55、计算单元,用于基于所述雷达扫描数据的特征以及多个所述虚拟扫描的特征,计算所述雷达扫描数据分别与多个所述虚拟扫描之间的第一距离;所述第一距离用于表达雷达扫描数据和虚拟扫描之间的相似度;
56、位置识别单元,用于基于多个所述第一距离的值确定目标虚拟视点,所述目标虚拟视点所在位置即为路侧雷达的位置。
57、本发明实施例的技术方案,通过地图数据生成多个虚拟视点的位置,以及通过雷达扫描数据获取虚拟雷达参数,从而生成虚拟试点的虚拟扫描;通过提取雷达扫描数据以及多个虚拟扫描的特征,以特征值计算出雷达扫描数据以及多个虚拟扫描的第一距离,根据第一距离的值来确定目标虚拟视点,从而确定路侧雷达的位置,解决了路侧雷达标定过程中初值难以确定的问题,本发明能够可应用于城区车路协同的数据整合工作,有助于实现更安全、高效的道路交通系统。
58、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。