本技术属于内孤立波实验,具体地,涉及一种内孤立波作用力测量装置、测量系统及测量方法。
背景技术:
1、海洋中的真实流体,其密度、盐度和温度常常随深度而变化,即一般为分层流体。内波是分层流体中存在着的扰动,当潜体遇到波长为潜体长度的1~2倍的海洋内波时,内波对潜体的影响较大并且容易出现危险;而众多类型的内波中,处于这类波长范围的海洋内波通常是内孤立波。内孤立波作为一种特殊的非线性内波,其波高往往较大,且广泛分布在全球海洋中,尤其我国南海为世界最大振幅内孤立波发生的海域。内孤立波传播过程中会引起海水强烈的幅聚幅散和突发性的强流,对于跨越密跃层的潜体产生剪切作用,停坐在跃层上的潜体,在跃层处随内孤立波做大幅度的上下波动时,可能会在潜体距海面的距离变小时暴露其位置,也可能被死死地压到潜体的极限深度以下,被巨大的海水压力破坏,造成失事。可见内孤立波对潜体的稳定性、操控性会受到很大影响。因此,研究内孤立波对水下潜体水动力性能的影响具有十分重要的价值。
2、除了使用数值模拟方式对内孤立波与潜体相互作用进行研究,也可以使用水池实验方式对潜体模型等水下目标受到的内孤立波作用力进行测量,例如,专利201810114516.7公开了一种内波与潜体相互作用的实验系统,利用布设于潜体模型头部、中部及侧部的三个压力传感器分别测量三个方向的受力,然而,上述方式的测量位置为潜体模型的表面,并不能直接获取其质心处的受力状况,同时,由于内孤立波的特点,水平方向与垂直方向作用力可能相差一个数量级,为了保证实验精度,需要使用不同量程和精度的传感器,增加了实验装置价格及使用成本;又如,专利202211064910.7提出一种水下结构物与内孤立波作用的嵌入式测力方法,将测力传感器嵌入水下结构物模型内部,同时测量内孤立波经过时对结构物模型的三维受力数据,然而,同时满足水平力和垂向力十分之一量级微小力精度及量程要求的多分力传感器一般需要单独定制,其价格远超单分力传感器,并且其方案中将传感器内置入水下潜体模型,由于实验的流体环境通常包含油和水,因此极大地增加了传感器的安装、密封等操作的复杂程度,无疑增大了传感器损坏的概率。
3、因此,需要对测量系统进行有针对性的优化,以解决上述现有的各种水池实验方案存在的问题。
技术实现思路
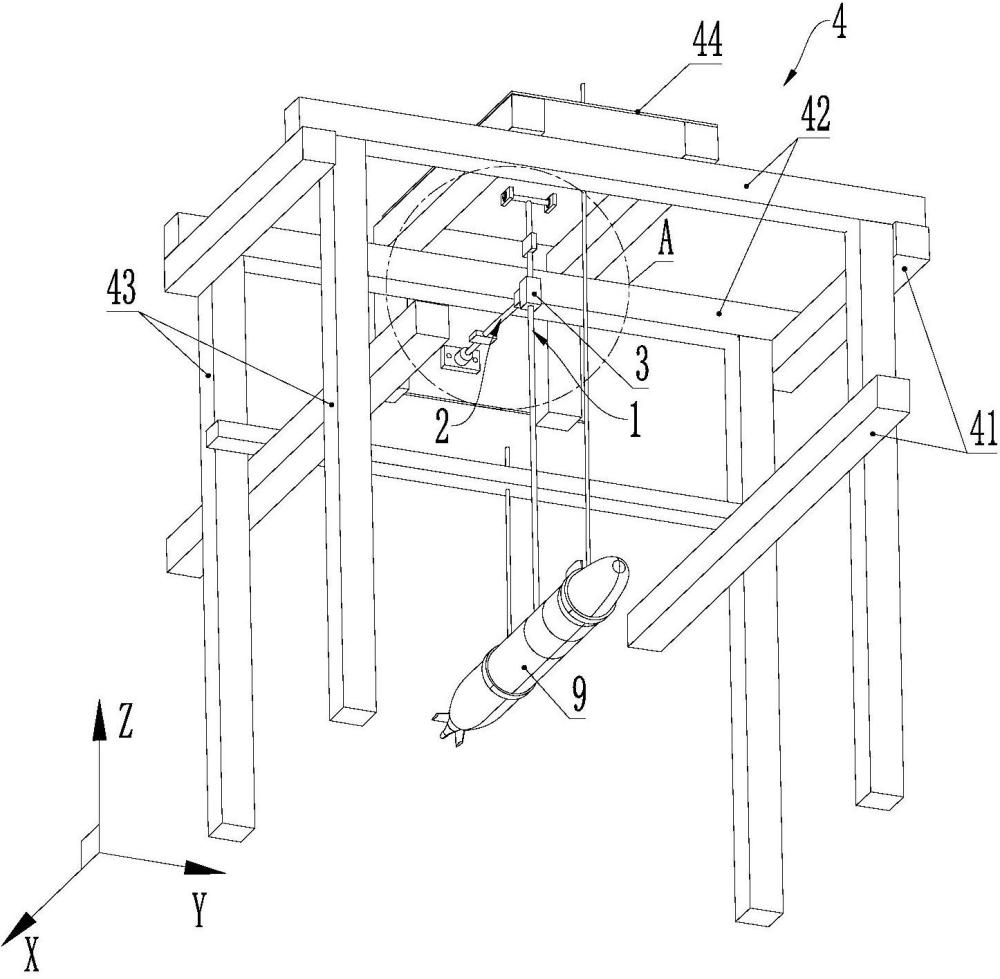
1、为解决上述现有技术中存在的问题,本技术通过实施例提供一种内孤立波作用力测量装置,用于测量布设于实验水池内的水下目标所受的内孤立波作用力,包括支撑结构和测量单元,所述支撑结构用于支撑所述测量单元,所述测量单元包括第一测量部,第二测量部及作用力传递部;所述第一测量部用于测量所述水下目标的质心受到的内孤立波对其施加的竖直作用力,以及用于传递所述水下目标的质心受到的内孤立波对其施加的水平作用力,其中,所述水平作用力的正向为内孤立波的传播方向;所述作用力传递部与所述第一测量部虚接,并与所述第二测量部固定连接,用于将所述水平作用力放大地传递至第二测量部;所述第二测量部用于测量放大后的水平作用力。
2、进一步地,所述第一测量部包括第一测力计,以及沿竖直方向固定连接于所述第一测力计的两侧的上连杆和下连杆,其中,所述上连杆与所述支撑结构可旋转地连接,且其旋转轴的方向同时垂直于竖直方向和所述内孤立波的传播方向,所述下连杆与所述水下目标固定连接,且其下端位于所述水下目标的质心;所述第二测量部包括第二测力计,以及沿所述内孤立波的传播方向固定连接于所述第二测力计的两侧的前连杆与后连杆,其中,所述前连杆与所述作用力传递部固定连接,所述后连杆与所述支撑结构可拆卸地固定连接。
3、优选地,所述水下目标的质心到所述上连杆的旋转轴的距离为所述作用力传递部到所述上连杆的旋转轴的距离的4~12倍。
4、优选地,所述作用力传递部包括虚接部,所述虚接部具有沿竖直方向贯通的虚接通道,所述上连杆或所述下连杆中的一个穿过所述虚接通道,并与所述虚接通道虚接;所述前连杆与所述虚接部固定连接。
5、进一步地,所述虚接具体为:
6、当穿过所述虚接通道的连杆的中心轴线与所述虚接通道的中心轴线重合时,穿过所述虚接通道的连杆不对所述虚接部施加水平方向的力;
7、当穿过所述虚接通道的连杆的中心轴线与所述虚接通道的中心轴线之间的偏差超过预设的偏差阈值时,穿过所述虚接通道的连杆对所述虚接部施加水平方向的力。
8、优选地,所述作用力传递部还包括连接部,所述连接部朝向所述前连杆的一端与所述前连杆固定连接,背向所述前连杆的一端与所述虚接部固定连接。
9、优选地,所述虚接通道的长度小于所述前连杆的直径。
10、优选地,穿过所述虚接通道的连杆为圆柱形杆,且所述虚接部被构造为具有圆形或椭圆形的截面的圆环。
11、优选地,穿过所述虚接通道的连杆为矩形杆,且所述虚接部被构造为具有楔形的截面的矩形环。
12、优选地,所述连接部朝向所述前连杆的一端开有固定槽,所述前连杆朝向所述连接部的一端通过插入所述固定槽与所述连接部固定连接。
13、优选地,穿过所述虚接通道的连杆在所述虚接通道内的部分涂覆润滑材料。
14、优选地,所述第一测力计位于所述虚接通道的下方。
15、进一步地,所述支撑结构设置于所述实验水池的上方,包括互相配合的纵向支撑单元、横向支撑单元、竖向支撑单元、设置于所述横向支撑单元上方的上顶板,以及设置于所述竖向支撑单元朝向所述内孤立波的传播方向一侧的侧板。
16、所述上顶板的下表面设置有铰接部,所述铰接部包括铰接座、转轴及轴承;所述铰接座与所述上顶板的下表面固定连接,所述转轴与所述上连杆的上端固定连接,并通过所述轴承与所述铰接座可旋转地连接。
17、所述侧板上设置有调节限位机构,所述后连杆贯穿所述侧板,并通过所述调节限位机构对所述后连杆相对于所述侧板的水平位置进行限位。
18、本技术通过实施例还提供一种内孤立波作用力测量系统,包括实验水池、造波机构、消波机构及水下目标,所述实验水池内灌注有至少两种密度不同的液体,所述造波机构用于制造传播于所述两种密度不同的液体交界面处的内孤立波,所处消波机构用于消除所述内孤立波;该测量系统还包括前述的内孤立波作用力测量装置,用于测量所述水下目标所受的内孤立波作用力。
19、本技术通过实施例还提供一种内孤立波作用力测量方法,该方法使用前述的内孤立波作用力测量系统对水下目标所受的内孤立波作用力进行测量,包括以下步骤:
20、将所述内孤立波测量装置中的支撑装置、第一测量部、第二测量部、作用力传递部进行初步组装;
21、调节所述第一测量部、第二测量部及作用力传递部的位置,使所述作用力传递部与所述第一测量部虚接;
22、将所述第一测量部的下端与所述水下目标的质心固定连接,并通过调节配重使所述水下目标在实验水池中处于重力与浮力平衡状态;
23、在所述实验水池中制造内孤立波;
24、分别通过所述第一测量部和第二测量部在所述内孤立波通过所述水下目标时在竖直方向及水平方向进行测量;
25、基于所述第一测量部的测量结果确定所述水下目标的质心受到的内孤立波对其施加的竖直作用力;
26、基于所述第二测量部的测量结果以及放大倍数确定所述水下目标的质心受到的内孤立波对其施加的水平作用力,其中,所述放大倍数基于所述作用力传递部与所述第一测量部虚接的位置确定。
27、优选地,在将所述第一测量部的下端与所述水下目标的质心固定连接之前,该方法还包括以下步骤:
28、在所述第一测量部的下端依次挂设沿竖向对其施力且质量不同的若干组标准砝码,基于第一测量部的各次测量结果确定所述第一测量部的误差修正值,所述误差修正值用于对所述竖直作用力进行修正;
29、在所述第一测量部的下端依次挂设沿水平方向对其施力且质量不同的若干组标准砝码,基于第二测量部的各次测量结果确定所述放大倍数。
30、本技术实施例提供内孤立波作用力测量装置,作用力传递部与分别与竖向的第一测量部虚接,与水平的第二测量部固定连接,通过这种连接方式对内孤立波的竖直作用力进行直接采集,同时利用第一测量部相对于支撑结构的可旋转性将内孤立波的水平作用力放大地传递至第二测量部,使得内孤立波作用力在各方向分量的大小处于一致的量级范围,从而可以使用多个量程、精度一致的高精度单分力传感器进行内孤立波各方向分力的测量,相对于现有方案,既无需选用多种不同规格的传感器,又避免了只在质心处设置一个多分力传感器时,由于各方向受力分量存在量级差异,为保证解耦求得的各分量误差控制在可接受的范围,需要单独定制宽量程高精度的多分力传感器的问题。