一种基于水下自主航行器的海上溢油厚度检测方法及系统
本发明涉及海上溢油检测,尤其涉及一种基于水下自主航行器的海上溢油厚度检测方法及系统。
背景技术:
1、随着我国深海油气资源开采力度的增大以及海上原油输送依赖度的增强,我国面临的海上溢油风险在逐年增大。近年来,我国大小海洋溢油事故平均每年发生约500起,如渤海康菲原油钻井平台泄漏和大连输油管道爆炸等,防控海洋油污任务迫在眉睫。针对海上溢油无论采用何种处置手段,及时、准确获取溢油厚度信息是合理、高效地指导溢油治理的关键。因此,如何实现对海上溢油厚度的高效和精准测量是该领域一项重要研究内容。
2、目前国内外对溢油厚度检测技术开展了大量的原理与实验研究,技术手段主要包括紫外与红外高光谱、微波辐射计、卫星与航空合成孔径雷达、浮标以及天线电阻等技术。然而上述技术实验多是在较为理想环境下开展的,都存在一定应用局限性,如紫外与红外高光谱只对较薄油膜(<1毫米)厚度测量有效,且易受太阳耀斑、海洋生物等干扰;浮标技术则只适用于定点测量;微波辐射计容易受到海浪和太阳辐射等因素影响,大大降低测量精度。因此,现有的技术难以满足海洋油污监测的需要,现场实时、在线、连续海洋油污监测,是我国乃至世界上亟须面对的一个技术难题。因此开发一种能够实际应用的、实时的、高效的、可大范围测量的溢油层厚度检测方法和对应检测系统是一项较为重大的需求。
技术实现思路
1、为了克服或缓解以上一个或多个技术问题,本发明目的是提供一种基于水下自主航行器的海上溢油厚度检测方法及系统,其具有实时在线、高效大范围自动测量溢油层厚度。
2、本发明提供了如下的技术方案:
3、一方面,本发明提供了一种基于水下自主航行器的海上溢油厚度检测系统,其包括:设于水下航行器内的控制单元,所述控制单元分别与超声信号收发单元、超声信号处理与存储单元、定位导航单元、路径规划单元、自主避障单元和水声通信单元电连接;
4、所述自主避障单元,用以对所述水下航行器航向前方区域进行主动探测,探测结果以二维图像形式输出,并采用深度学习网络对所述二维图像中的障碍物进行自主和智能识别,将识别结果发送至控制单元;
5、所述水声通信单元,用以每间隔固定时间将水下航行器的剩余电量信息、运动轨迹信息及轨迹上方海面溢油厚度测量结果发送至指挥中心进行显示;并实时接收来自指挥中心关于下一阶段需要探测区域的指令信息;
6、所述路径规划单元,用以根据水声通信单元接收到的下一阶段需要探测区域的指令信息中的位置信息和导航定位单元记录的水下航行器当前位置信息,规划出水下航行器接下来的最优运动路径,并发送至控制单元;
7、所述导航定位单元,用以对水下航行器的水下位置定位,并实时记录水下航行器的运动轨迹信息,通过水声通信单元将运动轨迹信息发送至指挥中心进行显示;
8、所述控制单元,用以根据导航定位单元发送的位置信息、路径规划单元发送的运动路径以及自主避障单元发送的障碍物信息进行运动控制;并对水下航行器定深运动控制;控制所述超声信号收发单元发射和接收超声信号;
9、所述超声信号收发单元,用以根据控制单元指令进行超声信号发射和接收,并将采集后的数字信号实时发送到超声信号处理与存储单元;
10、所述超声信号处理与存储单元,用以采用超声信号处理算法对超声信号收发单元发送的数字信号进行分析,进行溢油厚度计算,记录超声信号收发单元发送的数字信号,并记录溢油厚度信息和对应的时间信息,同时将信息发送到控制单元。
11、根据一些实施方式,所述超声信号收发单元上设有超声探头,所述超声探头为水浸式宽带超声探头,采用多个超声探头布防模式,其工作中心频率为0.5mhz~7.5mhz。
12、根据一些实施方式,所述超声信号收发单元和所述超声探头采用收发共置工作模式。
13、根据一些实施方式,所述超声信号收发单元和所述超声探头采用串行依次发射方式或并行同步发射方式。
14、根据一些实施方式,在溢油厚度测量过程中,所述水下航行器定深于水面下1.5m~3m。
15、根据一些实施方式,所述水声通信单元采用全双工水声通信。
16、另一方面,本发明还提供了一种如上述基于水下自主航行器的海上溢油厚度检测系统的检测方法,其包括以下步骤:
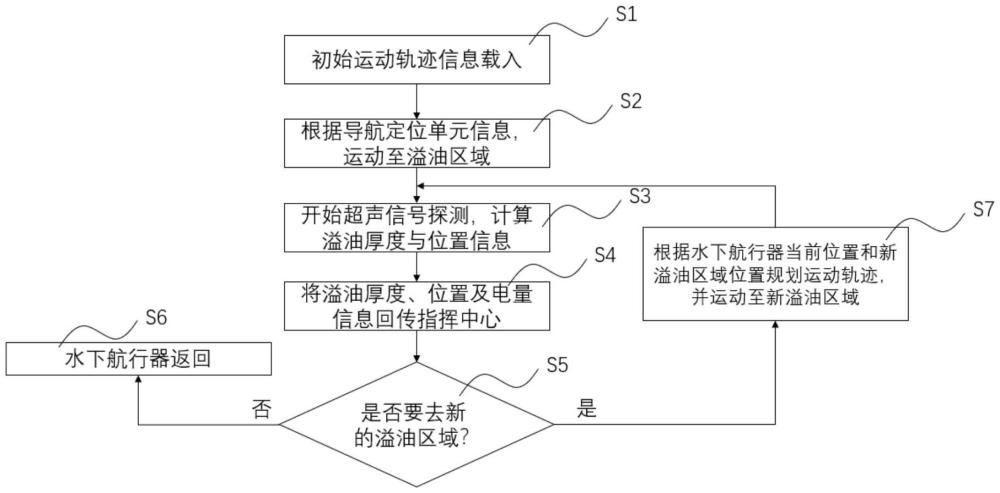
17、s1:根据指挥中心已探明的溢油区域信息规划的水下航行器的运动轨迹,指挥中心将轨迹信息载入到水下航行器的控制单元中,水下航行器下水后开始航行模式;
18、s2:控制单元根据导航定位单元提供的位置信息和载入的运动轨迹信息,控制水下航行器运动到溢油区域,同时依靠自主避障单元提供给控制单元的水下航行器的前方障碍物信息确保水下航行器在航行过程在的安全性;
19、s3:水下航行器到达溢油区域起始点后,控制单元启动超声信号收发单元和超声信号处理与存储单元,超声信号处理与存储单元实时计算溢油厚度信息与该探测点的位置信息,同时存储上述厚度与位置信息及超声时域回波信号;
20、s4:水下航行器在溢油区域内的运动轨迹呈z字形或s型往返运动,且每间隔一定时间将探测到的溢油厚度信息和对应位置信息、电池余量信息发送到指挥中心;指挥中心通过水声通信单元向控制单元发送控制指令,包括航行速度、超声脉冲发射频率以及是否前往新的溢油区域进行探测;
21、s5:当水下航行器完成步骤s1中载入运动轨迹后,若控制单元接收到不需要前往新的溢油区域进行探测的指令,进入步骤s6;若控制单元接收到需要前往新的溢油区域进行探测的指令,进入步骤s7:
22、s6:水下航行器自主回到出发位置;
23、s7:通过路径规划单元根据水下航行器当前位置和目标区域位置信息规划出最优运动轨迹,并发送到控制单元,使水下航行器运动到新的溢油区域,返回步骤s3。
24、根据一些实施方式,步骤s3包括以下步骤:
25、s31:控制单元控制超声信号收发单元开始测量,同时对运动轨迹上方海面溢油厚度实时测量;
26、s32:超声探头将超声信号收发单元激发的超声信号向海面方向发射出去,并接收从油层与水反射面和油层与空气反射面反射回来的超声信号,同时超声信号收发单元记录当前时间信息,并将数字化后的超声反射信号和对应时间信息发送到超声信号处理与存储单元;
27、s33:超声信号处理与存储单元采用超声信号处理算法对超声反射信号进行分析,提取超声波在油层与水反射面和油层与空气反射面间的一次往返传播时间,根据传播时间,得到油层的厚度;记录超声信号收发单元发送的数字信号、溢油厚度信息和对应的时间信息,同时将厚度和时间信息发送到控制单元;
28、s34:每间隔固定时间,控制单元将由超声信号处理与存储单元测量的油层厚度和对应的时间信息、由定位导航单元测量的位置和对应的时间信息、电池余量信息发送到水声通信单元,通过水声通信单元的无线通信方式发送到指挥中心。
29、根据一些实施方式,步骤s33中的超声信号处理算法采用一次相关法,包括以下步骤:
30、s331:采用两个时间窗口分别提取油层与水反射面和油层与空气反射面的反射信号;
31、s332:对两个通道信号进行一次相关运算,一次相关函数对应的峰值点就是两个反射信号间的时间延迟,即往返传播时间τ;
32、s333:根据一次往返传播时间τ,得到油层的厚度,即:
33、thk=c×τ2
34、其中,c为超声波在溢油层中的传播速度。
35、根据一些实施方式,步骤s3中,对于每一个测量点的溢油厚度测量结果,采用多次测量取平均的方法消除异常测量值。
36、相比于现有技术,本发明具备以下有益效果:
37、本发明提供的基于水下自主航行器的海上溢油厚度检测方法和系统,通过可远程自动控制的水下航行器,对大范围,多个分散区域的溢油层厚度进行实时的、高精度的、高效的且可大范围连续的测量,通过控制单元控制各个功能模块,如通过水声通信单元无线接收指挥中心的指令,并且通过导航定位单元把水下航行器的实时位置反馈给指挥中心;而通过路径规划单元,可高效规划检测路线,提高检测效率。
- 还没有人留言评论。精彩留言会获得点赞!