一种固废收运车辆动态路线优化管理方法及系统与流程
本发明涉及车辆路线管理系统,具体地说,涉及一种固废收运车辆动态路线优化管理方法及系统。
背景技术:
1、固废收运车辆路线优化管理技术是一项重要的技术,随着城市化进程的加速和经济的快速发展,固体废物的产生量不断增加,固废的收运和处理成了一个重要的问题,在固废收运过程中,如何合理规划收运车辆的路线,提高收运效率降低成本,是当前亟待解决的技术问题。
2、由于传统固废收运方法缺乏必要的传感器和实时监控手段,导致垃圾箱位置和装载状态无法准确获取,因为垃圾箱位置和装载信息不准确,某些区域的车辆可能空载运行,而其他区域的车辆可能超载,容易导致收运车辆的空载率和超载率较高,传统的路线规划方式由于车辆空转、超载或路线不优化,导致了额外的能源消耗,进而增加了碳排放和对环境的污染,浪费资源的同时也增加了运输成本,此外,对于固废的识别和定位也存在困难,传统收运方式缺乏rfid、条形码或图像识别等技术,难以实现精准的固废定位和分类,从而影响了固废收运的准确性和及时性,为了解决这一技术问题,于是我们提供了一种固废收运车辆动态路线优化管理方法及系统。
技术实现思路
1、本发明的目的在于提供一种固废收运车辆动态路线优化管理方法及系统,通过在各个园区的垃圾箱放置点部署传感器节点构建无线传感器网络,能够准确获取垃圾箱的位置,避免了人工逐个检查的繁琐和误差的问题。
2、为解决背景技术问题,本发明目的之一在于提供了一种固废收运车辆动态路线优化管理方法,包括以下步骤:
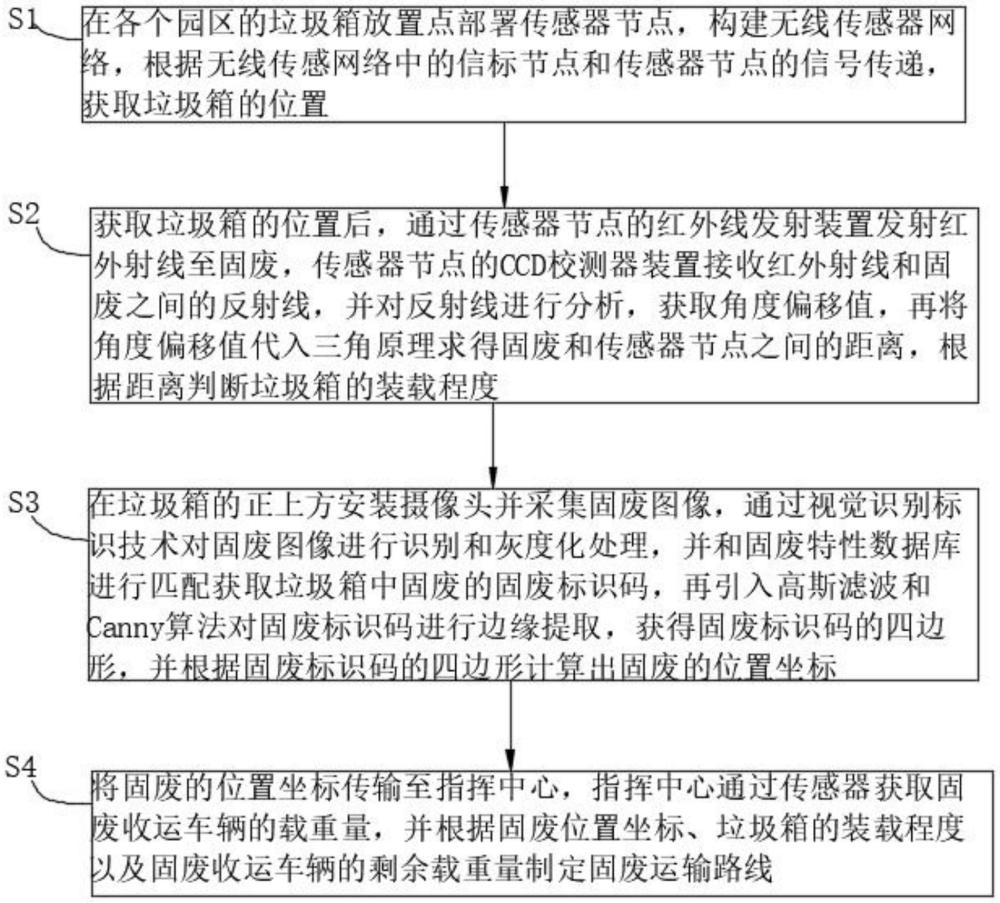
3、s1、在各个园区的垃圾箱放置点部署传感器节点,构建无线传感器网络,根据无线传感网络中的信标节点和传感器节点的信号传递,获取垃圾箱的位置;
4、s2、获取垃圾箱的位置后,通过传感器节点的红外线发射装置发射红外射线至固废,传感器节点的ccd校测器装置接收红外射线和固废之间的反射线,并对反射线进行分析,获取角度偏移值,再将角度偏移值代入三角原理求得固废和传感器节点之间的距离,根据距离判断垃圾箱的装载程度;
5、s3、在垃圾箱的正上方安装摄像头并采集固废图像,通过视觉识别标识技术对固废图像进行识别和灰度化处理,并和固废特性数据库进行匹配获取垃圾箱中固废的固废标识码,再引入高斯滤波和canny算法对固废标识码进行边缘提取,获得固废标识码的四边形,并根据固废标识码的四边形计算出固废的位置坐标;
6、s4、将固废的位置坐标传输至指挥中心,指挥中心通过传感器获取固废收运车辆的载重量,并根据固废位置坐标、垃圾箱的装载程度以及固废收运车辆的剩余载重量制定固废运输路线。
7、作为本技术方案的进一步改进,所述s1中根据无线传感网络中的信标节点和传感器节点的信号传递,获取垃圾箱的位置的方式,具体包括:
8、无线传感器中的信标节点向垃圾箱周围发送包含自身位置信息的信号,垃圾箱放置点的传感器节点接收信标节点发送的信号,并测量接收到的信号强度和信号到达的时间,根据信号强度和时间等信息,计算传感器节点与信标节点之间的距离,通过与多个信标节点进行信号传递和测量,利用三角定位算法确定传感器节点的位置坐标,即垃圾箱的位置坐标。
9、作为本技术方案的进一步改进,所述s2中通过传感器节点的红外线发射装置发射红外射线至固废,传感器节点的ccd校测器装置接收红外射线和固废之间的反射线的方式,具体包括:
10、在垃圾箱的传感器节点上安装红外线发射装置和ccd校测器装置,所述红外线发射装置用于向垃圾箱内的固废发射红外线,所述ccd校测器装置用于接收红外射线和固废之间的反射线,通过传感器内部的测量机制,确定反射线的入射角度,将反射线的入射角度与红外射线的发射角度进行比较,并根据入射角度和发射角度的差异,计算出反射线的角度偏移值。
11、作为本技术方案的进一步改进,所述s2中通过三角原理求得固废和传感器节点之间的距离,根据距离判断垃圾箱的装载程度的方式,具体包括:
12、将传感器节点的红外线发射装置发射红外射线的角度记为θf,通过传感器节点的ccd校测器装置获取到的反射线角度偏移值,结合发射角度可得到反射角度,记为θr,传感器节点到垃圾箱底部的垂直距离记为h,以传感器节点为顶点,向固废发射的红外射线和传感器节点到垃圾箱底部的垂线构成一个三角形,根据正弦定理计算出传感器节点到固废的距离d,所述传感器节点到固废的距离d的计算公式为d=h×tan(θf+θr);
13、根据历史经验设定d1、d2、d3三个距离阈值将垃圾箱装载程度分成高、中、低三个等级,且d1<d2<d3,当d<d1时,判断垃圾箱为高装载程度,当d1<d<d2时,判断垃圾箱为中等装载程度,当d2<d<d3时,判断垃圾箱为低装载程度,当d3<d时,判断为垃圾箱刚投入使用或者没有固废。
14、作为本技术方案的进一步改进,所述s3中通过视觉识别标识技术对固废图像进行灰度化处理,并和固废特性数据库进行匹配获取垃圾箱中固废的固废标识码的方式,具体包括:
15、通过垃圾箱正上方的摄像头,对高装载程度、中等装载程度以及低装载程度的垃圾箱进行视频采集,获取垃圾箱中的固废视频流,按照相同的时间间隔从固废视频流中提取固废单帧图像,并采用最大值法对固废单帧图像进行灰度化处理,对灰度化后的固废单帧图像进行特征提取,获得固废的纹理特征、颜色特征以及形状特征;
16、收集不同类型的固废图像,根据历史经验对固废的纹理特征、颜色特征以及形状特征进行权重调整,获得固废的综合特征,将固废的综合特征转换成向量表示,记为f=(t1,t2,t3),其中,f表示为固废的综合特征向量,t1表示为固废的纹理特征,t2表示为颜色特征,t3表示为形状特征,计算待识别固废的综合特征向量与固废特性数据库中每个固废类型的综合特征向量之间的相似度,选择相似度最高的固废类型作为匹配结果,并将其对应的标识码确定为固废的标识码。
17、作为本技术方案的进一步改进,所述s3中引入高斯滤波对固废标识码进行边缘提取,获得固废标识码的四边形,并根据固废标识码的四边形,得到固废的位置坐标的方式,具体包括:
18、使用高斯滤波对固废标识码图像进行平滑处理,并根据canny算法对固废标识码图像进行非极大值抑制和双阈值检测,获得固废标识码边缘图像,再使用轮廓检测算法检测固废标识码边缘图像中的所有轮廓,得出轮廓的凸包数量,并检查轮廓的凸包数量是否为4,若是则为四边形轮廓,并提取该轮廓区域的图像,即得到固废标识码的四边形;
19、设摄像头的光心坐标为(cx,cy,cz),摄像头的焦距为j,标识码四边形中的一个顶点在图像中的坐标为(u1,v1),则标识码四边形中的一个顶点在实际空间中的坐标(x1,y1,z)通过以下公式计算:
20、
21、
22、其中,z由固废的实际尺寸和在固废图像中的尺寸比例计算所得,同理可得标识码四边形其余三个顶点的在实际空间中的坐标,并通过计算标识码四边形四个顶点坐标的平均值作为标识码中心的坐标(x0,y0,z0),设标识码中心在固废上的坐标相对于固废中心的偏移量为(ex,ey,ez),则固废的中心坐标为(x0+ex,y0+ey,z0+ez),在平面上的位置即为(x0+ex,y0+ey)。
23、作为本技术方案的进一步改进,所述s4中指挥中心通过传感器获取固废收运车辆的载重量,并根据固废位置坐标和固废收运车辆的载重量制定固废运输路线的方式,具体包括:
24、在固废收运车辆的底部安装载重量传感器,所述载重量传感器用于实时获取固废收运车辆的载重量,并反馈至指挥中心,将各个园区的固废位置坐标导入gis软件中,并根据各个园区的固废位置的垃圾箱装载程度进行颜色标注,定义红色为高装载程度、蓝色为中等装载程度、绿色为低装载程度,根据固废收运车辆的载重量和各个园区的固废位置的垃圾箱装载程度制定固废运输路线;
25、指挥中心通过载重传感器获取全部固废收运车辆的剩余载重量,所述剩余载重量由固废收运车辆的最大载重量减去已装载载重量获得,并计算gis地图中红色标记的固废位置坐标和固废收运车辆位置坐标的距离,找出与红色标记的固废距离最近的固废收运车辆,优先安排剩余载重量最大且距离最近的固废收运车辆进行固废收集,完成固废收集后,指挥中心通过载重传感器重新获取固废收运车辆的剩余载重量,并通过gis地图获取其余园区的颜色标记,优先安排距离最近且剩余载重量最大的固废收运车辆收运红色标记处的固废。
26、本发明目的之二在于,提供了一种用于实现包括上述任意一项所述的一种固废收运车辆动态路线优化管理方法的系统,包括:
27、位置获取单元通过在各个园区的垃圾箱放置点部署传感器节点,构建无线传感器网络,并根据无线传感网络中的信标节点和传感器节点的信号传递,获取垃圾箱的位置坐标;
28、分析判断单元通过分析传感器节点发射的红外线和固废之间形成的反射线,获取角度偏移值,再将角度偏移值代入三角原理中进行分析,判断垃圾箱的装载程度;
29、识别坐标单元包括视觉识别模块和坐标获取模块;
30、所述视觉识别模块通过视觉识别标识技术对固废图像进行识别和灰度化处理,并和固废特性数据库进行匹配获取固废标识码;
31、所述坐标获取模块引入高斯滤波和canny算法对固废标识码进行边缘提取,获得固废标识码的四边形,并根据固废标识码的四边形计算出固废的位置坐标;
32、固废收运单元接收固废位置坐标和垃圾箱的装载程度,并根据固废位置坐标、垃圾箱的装载程度以及固废收运车辆的剩余载重量制定固废运输路线。
33、与现有技术相比,本发明的有益效果:
34、本发明通过在各个园区的垃圾箱放置点部署传感器节点构建无线传感器网络,能够准确获取垃圾箱的位置,避免了人工逐个检查的繁琐和误差。同时,利用传感器节点的红外线发射装置和ccd校测器装置,能够精确判断垃圾箱的装载程度,相比传统依靠人工观察或简单传感器的方式,更加准确可靠,采用视觉识别标识技术对固废图像进行处理,并与固废特性数据库进行匹配获取固废标识码,再通过高斯滤波和canny算法进行边缘提取,能够准确获得固废的位置坐标,这种方式提高了固废识别的效率和准确性,有助于优化固废收运路线的制定,指挥中心根据固废位置坐标、垃圾箱的装载程度以及固废收运车辆的剩余载重量制定固废运输路线,能够优先安排剩余载重量最大且距离最近的固废收运车辆进行固废收集,避免了车辆的空载和超载,提高了运输效率,降低了运输成本。
- 还没有人留言评论。精彩留言会获得点赞!