车辆转向类型的检测方法、装置、设备和存储介质与流程
本技术涉及汽车转向检测,尤其涉及车辆转向类型的检测方法、装置、设备和存储介质。
背景技术:
1、随着汽车技术的不断发展,车辆的操控性能和行驶安全性愈发受到重视。在驾驶过程中,车辆的不足转向度直接影响其行驶稳定性和安全性。车辆的不足转向度通常分为三种类型:中性转向、不足转向和过多转向。不同的不足转向度在不同路况下对车辆的行驶特性有着显著的影响。然而,当前大多数汽车在出厂时不足转向度便已固定,无法根据实际路况进行调整,这在一定程度上降低了车辆的驾驶性能和安全性。
2、目前,传统的不足转向度测量方法主要依赖于在特定场地进行固定转角或转弯半径下的测试,按照不同车速计算转角。这种方法虽然可以在实验室条件下提供一定的数据,但由于测试过程的复杂性和环境的限制,无法实现实时监测和动态调整。车辆在实际行驶中可能会遇到各种不同的路况和驾驶条件,依靠这种静态测量方法无法及时适应这些变化。
3、传统不足转向度的检测方法存在多方面的问题。首先,缺乏实时性,不能有效反映车辆在不同路况下的动态表现。其次,这种方法需要在特定环境下进行,限制了其应用范围和灵活性。此外,未能实现对不足转向度的有效调整,使得车辆在复杂驾驶环境中的安全性和稳定性受到影响。因此,如何实时获取车辆转向类型成为亟待解决的问题。
4、上述内容仅用于辅助理解本技术的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术目的在于提供一种车辆转向类型的检测方法、装置、设备和存储介质,旨在解决如何实时获取车辆转向类型的技术问题。
2、为实现上述目的,本技术提出一种车辆转向类型的检测方法,所述方法包括:
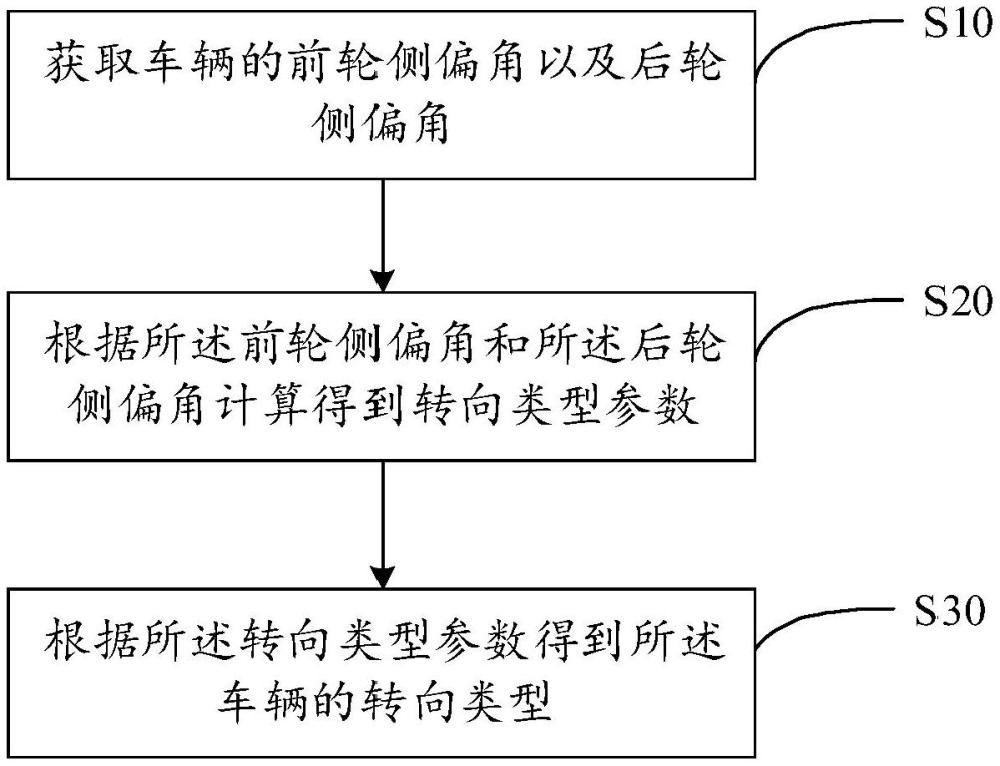
3、获取车辆的前轮侧偏角以及后轮侧偏角;
4、根据所述前轮侧偏角和所述后轮侧偏角计算得到转向类型参数;
5、根据所述转向类型参数得到所述车辆的转向类型。
6、在一实施例中,所述获取车辆的前轮侧偏角以及后轮侧偏角的步骤包括:
7、获取车辆的车轮侧向力、车轮转角、前轮侧偏刚度以及后轮侧偏刚度;
8、根据所述车轮侧向力计算得到前轮侧向力和后轮侧向力;
9、根据所述前轮侧向力、所述车轮转角以及所述前轮侧偏刚度计算得到前轮侧偏角;
10、根据所述后轮侧向力、所述车轮转角以及所述后轮侧偏刚度计算得到后轮侧偏角。
11、在一实施例中,所述获取车轮侧向力的步骤包括以下至少一项:
12、在车轮轮毂轴承法兰盘处安装有压力传感器的情况下,通过所述压力传感器测量得到车轮侧向力;
13、在车轮轮辋安装法兰处安装有所述压力传感器的情况下,通过所述压力传感器测量得到所述车轮侧向力;
14、在车辆三角臂衬套处安装有压敏导电硅橡胶的情况下,通过所述压敏导电硅橡胶测量得到所述车轮侧向力。
15、在一实施例中,所述车轮侧向力包括左前车轮侧向力、右前车轮侧向力、左后车轮侧向力以及右后车轮侧向力,所述根据所述车轮侧向力计算得到前轮侧向力和后轮侧向力的步骤包括:
16、根据左前车轮侧向力、右前车轮侧向力计算得到前轮侧向力;
17、根据左后车轮侧向力、右后车轮侧向力计算得到后轮侧向力。
18、在一实施例中,所述根据所述转向类型参数判断得到车辆的转向类型的步骤之后,还包括:
19、根据所述转向类型对主动悬架进行调整;
20、所述根据所述转向类型对主动悬架进行调整的步骤包括:
21、当路面湿滑且所述转向类型为过度转向的情况下,采取增大前轮弹簧刚度、增大前轮稳定杆刚度、减小后轮弹簧刚度以及减小后轮稳定杆刚度这些措施中的至少一项;
22、当车辆速度大于第一预设速度的情况下,采取增大主动悬架的硬度、增大所述主动悬架的阻尼系数、降低车身高度以及平衡前后桥悬架硬度这些措施中的至少一项;
23、当所述车辆速度小于第二预设速度的情况下,采取减小前悬架硬度、增大后悬架硬度、减小前悬架阻尼、增大后悬架阻尼、降低所述车身高度以及降低后轮胎压这些措施中的至少一项,所述第一预设速度大于所述第二预设速度。
24、在一实施例中,所述根据所述前轮侧偏角和所述后轮侧偏角计算得到转向类型参数的步骤包括:
25、获取车辆的侧向加速度和车辆轴距;
26、根据所述前轮侧偏角、所述后轮侧偏角、所述侧向加速度以及所述车辆轴距计算得到稳定因数;
27、根据所述稳定因数得到转向类型参数。
28、在一实施例中,所述根据所述转向类型参数判断得到所述车辆的转向类型的步骤包括:
29、当所述转向类型参数大于预设值的情况下,确定所述车辆的转向类型为不足转向;
30、当所述转向类型参数等于所述预设值的情况下,确定所述转向类型为中性转向;
31、当所述转向类型参数小于所述预设值的情况下,确定所述转向类型为过度转向。
32、此外,为实现上述目的,本技术还提出一种车辆转向类型的检测装置,所述装置包括:
33、数据获取模块,用于获取车辆的前轮侧偏角以及后轮侧偏角;
34、数据处理模块,用于根据所述前轮侧偏角和所述后轮侧偏角计算得到转向类型参数;
35、检测结果模块,用于根据所述转向类型参数得到所述车辆的转向类型。
36、此外,为实现上述目的,本技术还提出一种车辆转向类型的检测设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上文所述的车辆转向类型的检测方法的步骤。
37、此外,为实现上述目的,本技术还提出一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文所述的车辆转向类型的检测方法的步骤。
38、此外,为实现上述目的,本技术还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现如上文所述的车辆转向类型的检测方法的步骤。
39、本技术提出的一个或多个技术方案,至少具有以下技术效果:
40、获取车辆的前轮侧偏角以及后轮侧偏角;根据所述前轮侧偏角和所述后轮侧偏角计算得到转向类型参数;根据所述转向类型参数得到所述车辆的转向类型。首先通过传感器实时获取前轮和后轮的侧偏角,这些角度(前轮侧偏角α1和后轮侧偏角α2)是评估车辆转向状态的关键参数,能够反映车辆在转弯过程中的操控特性。接着,根据这些侧偏角计算转向类型参数,这一参数为判断车辆的转向行为提供了依据,能够帮助识别车辆是处于不足转向、中性转向还是过度转向状态。最后,通过分析转向类型参数,实时判断车辆的转向类型,使驾驶员或自动控制系统能够及时调整车辆操控。本技术能够实时获取车辆转向类型,进而根据转向类型对车辆进行调整,显著提高了行驶安全性、优化了操控性能、增强了车辆稳定性,并为自动驾驶技术提供了必要的信息支持,确保了在各种路况下车辆的最佳表现。
- 还没有人留言评论。精彩留言会获得点赞!