一种天地一体化的大坝变形监测实时基准建立方法及系统与流程
本发明属于大坝变形监测,具体涉及一种天地一体化的大坝变形监测实时基准建立方法及系统。
背景技术:
1、随着大坝规模的增大和服役年限的增长,大坝结构的健康状况与安全监测愈发重要。传统的变形监测技术往往因基准点设置、维护困难,尤其是在变形敏感区域,基准点的稳定性受到影响,导致监测数据的可靠性降低,进而限制了对大坝变形的准确判断和预测。随着bds(北斗卫星导航系统)为代表的全球卫星导航定位技术的成熟与发展,为大坝变形监测基准建立提供了新的解决方案。它能够提供全天候、高精度的三维定位信息,有助于建立稳定的、不受地面变形影响的虚拟空间基准,从而提高变形监测基准的稳定性和可靠性。
2、然而针对变形监测基准点(智能测站)多位于变形区域,监测基准点更新效率低、精度差,难以满足工程变形监测自动化的需求。
技术实现思路
1、本发明的目的就是为了解决上述背景技术存在的不足,提供一种天地一体化的大坝变形监测实时基准建立方法及系统,结合多源数据融合处理策略,自动对基准点位置进行高精度的实时动态更新。
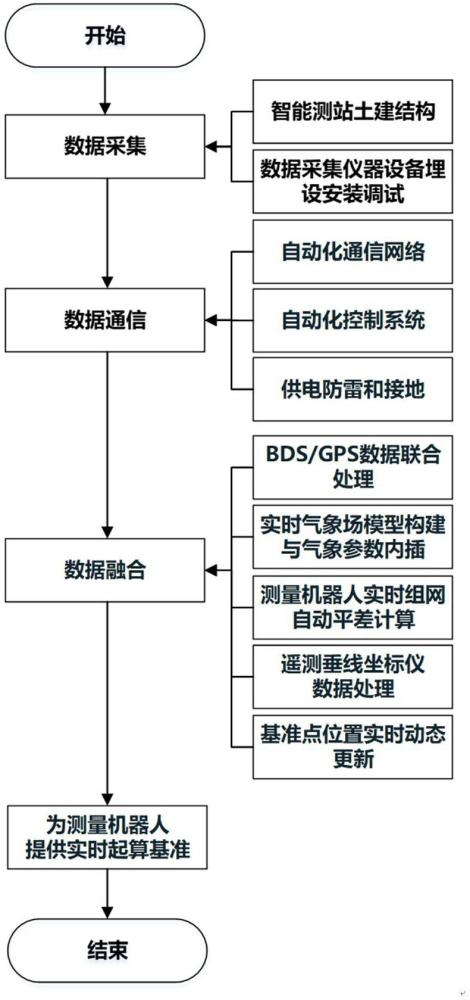
2、本发明采用的技术方案是:一种天地一体化的大坝变形监测实时基准建立方法,包括以下步骤:
3、向天基北斗系统、地基测量机器人系统和地基倒垂线系统下发控制指令;
4、通过天基北斗系统实时获取大坝变形区域的动态基准点位置;
5、通过地基测量机器人系统实时获取大坝变形区域的空间相对基准点位置;
6、通过地基倒垂线系统实时获取大坝变形区域的重力静态基准点位置;
7、将动态基准点位置、空间相对基准点位置和重力静态基准点位置进行数据融合,得到大坝变形区域的监测基准值。
8、上述技术方案中,将动态基准点位置、空间相对基准点位置和重力静态基准点位置进行数据融合,得到大坝变形区域的监测基准值的过程包括:
9、针对动态基准点位置、空间相对基准点位置和重力静态基准点位置分别构建对应的误差方程;
10、将动态基准点位置、空间相对基准点位置和重力静态基准点位置对应的误差方程整合形成一个联合平差的误差方程;
11、设定用于表征动态基准点位置、空间相对基准点位置和重力静态基准点位置权重的综合权重矩阵;
12、基于联合平差的误差方程和综合权重矩阵,以加权误差平方和最小为目标,通过最小二乘原理求解得到大坝变形区域的监测基准值。
13、上述技术方案中,所述动态基准点位置的误差方程表达式如下:
14、vgnss= agnssx - lgnss;
15、其中,vgnss表示天基北斗系统的gnss观测值的残差向量;agnss表示gnss观测值的设计矩阵;x表示大坝变形区域的监测基准值; lgnss表示gnss观测值向量;
16、所述空间相对基准点位置的误差方程表达式如下:
17、vrobot= arobotx - lrobot;
18、其中,vrobot表示地基测量机器人系统的观测值的残差向量;arobot表示地基测量机器人系统观测值的设计矩阵; lrobot表示地基测量机器人系统观测值向量。
19、所述重力静态基准点位置的误差方程表达式如下:
20、vplumbline= aplumblinex - lplumbline;
21、其中,vplumbline表示倒垂线位移的观测值的残差向量;aplumbline表示倒垂线位移观测值的设计矩阵; lplumbline表示倒垂线位移观测值向量。
22、上述技术方案中,所述联合平差的误差方程表达式为:
23、;
24、其中,vgnss表示天基北斗系统的gnss观测值的残差向量;agnss表示gnss观测值的设计矩阵;x表示大坝变形区域的监测基准值; lgnss表示gnss观测值向量;vrobot表示地基测量机器人系统的观测值的残差向量;arobot表示地基测量机器人系统观测值的设计矩阵;lrobot表示地基测量机器人系统观测值向量;vplumbline表示倒垂线位移的观测值的残差向量;aplumbline表示倒垂线位移观测值的设计矩阵; lplumbline表示倒垂线位移观测值向量。
25、上述技术方案中,所述综合权重矩阵p表达式为:
26、;
27、其中,pgnss表示gnss观测值的权重矩阵;probot 表示测量机器人观测值的权重矩阵;pplumbline表示倒垂线位移观测值的权重矩阵。
28、本发明还提供了一种天地一体化的大坝变形监测实时基准建立系统,用于实现所述的天地一体化的大坝变形监测实时基准建立方法;包括天基北斗系统、地基测量机器人系统、地基倒垂线系统、现场智能测站和监测中心:
29、其中,天基北斗系统将实时获取的大坝变形区域的动态基准点位置通过现场智能测站发送至监测中心;
30、地基测量机器人系统将实时获取的大坝变形区域的空间相对基准点位置通过现场智能测站发送至监测中心;
31、地基倒垂线系统将实时获取的大坝变形区域的重力静态基准点位置通过现场智能测站发送至监测中心;
32、监测中心将动态基准点位置、空间相对基准点位置和重力静态基准点位置进行数据融合,得到大坝变形区域的监测基准值;并向天基北斗系统、地基测量机器人系统和地基倒垂线系统下发控制指令。
33、上述技术方案中,还包括一体化观测墩;所述一体化观测墩固定设置于大坝变形区域内;其中,天基北斗系统的bds/gnss接收机固定于一体化观测墩顶部;
34、地基测量机器人系统包括测站点、基准点和监测点;其中,根据大坝变形区域情况在稳定的地基上建立测站点,所建立测站点上安装有一套测量机器人自动观测系统;测量机器人自动观测系统设置于一体化观测墩的一侧;
35、根据大坝变形区域情况均匀建立稳定的基准点,所建立基准点上装有一套正对测站点的单棱镜组,测站点至每个基准点的方向和距离要覆盖整个大坝变形区域;
36、在大坝变形区域上按断面均匀布设监测点,所建立监测点上装有一套或多套正对测站点的单棱镜组或者360°棱镜组;
37、地基倒垂线系统设置于一体化观测墩的另一侧;地基倒垂线系统的倒垂线通过竖直钻孔深埋于大坝变形区域内地基基岩上。
38、上述技术方案中,还包括保护房;一体化观测墩设置于保护房,其顶部向上延伸至保护房外部;测量机器人自动观测系统和地基倒垂线系统均位于保护房内部;所处现场智能测站设置于保护房内。
39、上述技术方案中,天基北斗系统、地基测量机器人系统和地基倒垂线系统分别通过对应的协议转换模块与对应的数据接入模块相互通信;数据接入模块与现场智能测站进行通信;所述数据接入模块采用tcp/ip协议;现场智能测站与数据接入模块采用光纤以太网方式组网。
40、上述技术方案中,监测中心所有设备接入厂房机房内永久电源,并使用ups不间断电源作为应急电源供电;现场智能测站、天基北斗系统、地基测量机器人系统和地基倒垂线系统均就近接入永久电源,其对应的各配电箱、机箱均作接地处理并就近接入电站的接地网;
41、在现场智能测站、天基北斗系统、地基测量机器人系统和地基倒垂线系统不同位置的钢管上焊接铜带作为接地点;其它没有接地点的现场智能测站、天基北斗系统、地基测量机器人系统和地基倒垂线系统中的设备则采用铜带延长线进行牵引,并作为接地点
42、本发明的有益效果是:本发明基于天基的北斗(实时动态基准)、地基的测量机器人(空间相对基准)和倒垂线仪器设备(重力静态基准)的融合数据处理,结合多源数据融合处理策略,自动对基准点位置实时动态更新,形成了天地一体化的大坝变形监测实时基准建立方法,实现对大坝变形的多角度、多层次、全方位监测,以满足现代化大坝安全管理对变形监测自动化、实时化、精确化的高标准要求。
- 还没有人留言评论。精彩留言会获得点赞!