一种基于瑞利点信息的偏振光定向方法
本发明涉及偏振光导航,具体是一种基于瑞利点信息的偏振光定向方法。
背景技术:
1、准确的定位信息是长航时无人平台自主导航的基础,而在卫星据止或复杂的电磁干扰环境情况下,现有的惯导存在误差积累,地磁导航易受干扰,无法满足无人平台高精度导航的要求。
2、太阳光在传播过程中受到大气粒子的吸收和散射作用产生了偏振光,大量偏振光汇聚在天空形成了具有一定分布规律的大气偏振模式。大气偏振模式中蕴含着方向信息,基于瑞利散射模型中偏振光e矢量垂直于散射面这一几何特性,可以通过测量大气偏振信息估计出载体方位角。由此可见,瑞利散射是研究大气偏振模式表征的重要理论方法,但只有在粒子尺度远小于入射光波长时才会发生,这使得瑞利散射理论难以解释水蒸气和气溶胶等其它粒子对散射过程的影响。而且由于天气的复杂性,无法用单一的散射模型来描述任何类型的天气,即便在晴天天气下也存在除瑞利散射外的其它散射,特别是在晴天有遮挡、少云、多云或者阴天天气下,导致定向误差增大。
技术实现思路
1、针对上述现有技术中的不足,本发明供一种基于瑞利点信息的偏振光定向方法,能够有效地提升偏振光定向的精度。
2、为实现上述目的,本发明提供一种基于瑞利点信息的偏振光定向方法,包括如下步骤:
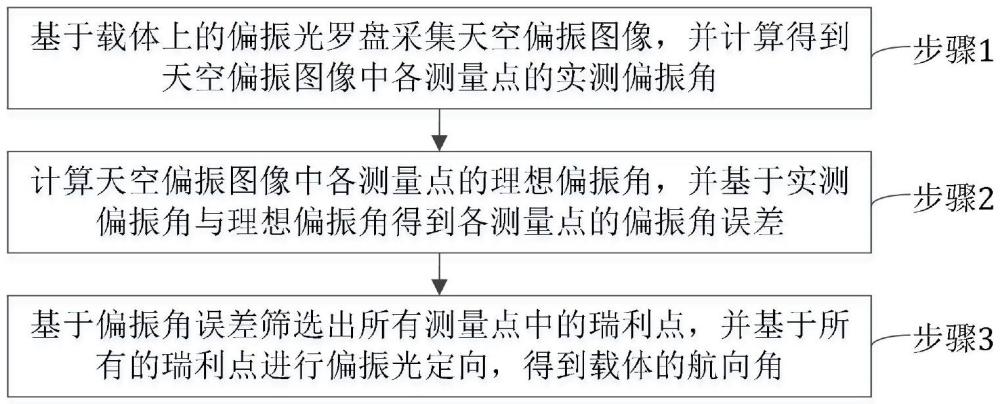
3、步骤1,基于载体上的偏振光罗盘采集天空偏振图像,并计算得到所述天空偏振图像中各测量点的实测偏振角;
4、步骤2,计算所述天空偏振图像中各测量点的理想偏振角,并基于所述实测偏振角与所述理想偏振角得到各测量点的偏振角误差;
5、步骤3,基于所述偏振角误差筛选出所有测量点中的瑞利点,并基于所有的瑞利点进行偏振光定向,得到载体的航向角。
6、在其中一个实施例,步骤1中,所述实测偏振角的计算过程为:
7、stokes矢量s0包含四个参数s0=[s1 s2 s3 s4],其中,s1表示总的光强度,s2是0°和90°方向上的光强差,s3是45°和135°方向上的光强差,s4是圆偏振分量,则偏振光透过偏振片后的光强为:
8、
9、其中,θ1是偏振角,是传感器偏振方向与系统光轴的夹角;
10、将s4分量省略,得到简化后的stokes强度方程为:
11、
12、当偏振角θ1分别取0°、45°、90°时,得到测量点的stokes参量为:
13、
14、不考虑圆偏振光,即可得测量点的实测偏振角为φa=(1/2)·arctan(s3/s2)。
15、在其中一个实施例,步骤2中,所述理想偏振角的计算过程为:
16、计算得到测量点的观测方向矢量v在光罗盘坐标系上的投影vc,为:
17、vc=[sinγv·cosαv sinγv·sinαv -cosγv]t
18、其中,t为矩阵的转置,αv为测量点在光罗盘坐标系下的方位角,γv为测量点在光罗盘坐标系下的天顶角;
19、计算得到太阳方向矢量s在光罗盘坐标系上的投影sc,为:
20、
21、其中,为载体坐标系到光罗盘坐标系的转换矩阵,为导航坐标系到光罗盘坐标系的转换矩阵,sn为导航坐标系下的太阳方向矢量;
22、基于观测方向矢量v、太阳方向矢量s在光罗盘坐标系上的投影vc、sc,计算得到测量点的e矢量e在光罗盘坐标系上的投影ec,为:
23、ec=k·vc×sc
24、其中,k为使等式两边相等的常数;
25、将测量点的e矢量e在光罗盘坐标系上的投影ec转换至测量点坐标系,为:
26、
27、其中,为光罗盘坐标系到测量点坐标系的转换矩阵,e1、e2、e3为向量ev的三个元素;;此外,测量点的e矢量e在测量点坐标系还可用偏振角表示,为:
28、
29、由此可得测量点的理想偏振角为φb=arctan(e2/e1)。
30、在其中一个实施例,所述载体坐标系到光罗盘坐标系的转换矩阵距离为:
31、
32、所述导航坐标系到光罗盘坐标系的转换矩阵具体为:
33、
34、其中,r0、θ0、ψ0分别由其它传感器提供载体滚动角、俯仰角与航向角;
35、所述导航坐标系下的太阳方向矢量具体为:
36、
37、其中,为太阳方向矢量在导航坐标系下的方位角,为太阳方向矢量在导航坐标系下的高度角。
38、在其中一个实施例,所述使等式两边相等的常数k具体为:
39、
40、其中,τ为散射角。
41、在其中一个实施例,步骤2中,所述偏振角误差具体为:
42、δφ=|φa-φb|
43、其中,δφ为偏振角误差,φa为实测偏振角,φb为理想偏振角。
44、在其中一个实施例,步骤3中,基于所述偏振角误差筛选出所有测量点中的瑞利点的过程为:
45、对于任一测量点,判断其偏振角误差是否满足δφ≤φthres,若是则该测量点为瑞利点,否则为非瑞利点,其中,φthres为阈值。
46、在其中一个实施例,所述阈值φthres=5°。
47、在其中一个实施例,步骤3中,基于所有的瑞利点进行偏振光定向的过程为:
48、获取由所有瑞利点构成的瑞利点集ec,为:
49、
50、其中,i=1~l为第i个瑞利点的e矢量在光罗盘坐标系上的投影,l为瑞利点的总数;
51、瑞利点集ec中每一瑞利点均满足偏振矢量正交性,即:
52、
53、其中,i=1~l为第i个瑞利点的观测方向矢量在光罗盘坐标系上的投影,sc为太阳方向矢量在光罗盘坐标系上的投影;
54、同一时间地点,不同瑞利点对应着不同的e矢量和不同的观测方向矢量,但是对应的太阳方向矢量是统一的,因此将所有瑞利点联立方程组,采用拉格朗日乘数法即可求出太阳方向矢量在光罗盘坐标系上的投影sc;
55、此外,太阳方向矢量在光罗盘坐标系上的投影还可表示为:
56、
57、其中,αs为太阳方向矢量在光罗盘坐标系上的方位角,hs为太阳方向矢量在光罗盘坐标系上的天顶角;
58、即:
59、
60、其中,sc(1)、sc(2)分为向量sc中的第一个元素和第二元素;
61、基于太阳方向矢量在光罗盘坐标系上的方位角αs以及太阳方向矢量在导航坐标系上的方位角即可得到载体的航向角,为:
62、
63、或
64、
65、其中,ψ为载体的航向角,π为偏振光定向的模糊度。
66、与现有技术相比,本发明具有如下有益技术效果:
67、本发明通过在偏振光定向之前比对各个测量点的实测偏振角与理论偏振角,并基于实测偏振角与理论偏振角间的偏振角误差筛选出天空偏振图像中的瑞利点,再只通过筛选出的瑞利点进行偏振光定向,从而显著提高提升偏振光定向的精度。
- 还没有人留言评论。精彩留言会获得点赞!