一种深海采矿海底羽流扩散综合实验设备及其控制方法
本发明属于实验水池设计领域,涉及了一种深海采矿海底羽流扩散综合实验设备及其控制方法。
背景技术:
1、深海矿产资源的开采可以有效解决陆上资源匮乏问题,满足社会经济发展需求,但深海矿产资源广泛分布于海底,贸然进行商业化开采,必将对海洋生态环境造成巨大影响甚至是不可逆的毁灭性打击。深海采矿对环境的影响主要包含采矿过程的噪声、光以及羽流等,其中深海采矿羽流包含采矿车对海底沉积物扰动引起的羽流和水面支持船选矿尾矿排放产生的羽流,会扩散到采矿区以外绵延几公里到几十公里甚至更远,是深海采矿过程中最主要的污染因素,因此对深海采矿羽流扩散的研究十分重要。实验室监测具有简单、方便、低成本的优点,是深海采矿羽流扩散研究的主要方式,因此本发明在现有研究的基础上,着重关注海底底流对扩散的影响、沉积物稳定喷泵、大范围扩散速度监测等方面,提出了一种深海采矿海底羽流扩散综合实验设备及其控制方法。
技术实现思路
1、针对上述问题,本发明目的是提出了一种深海采矿海底羽流扩散综合实验设备及其控制方法。
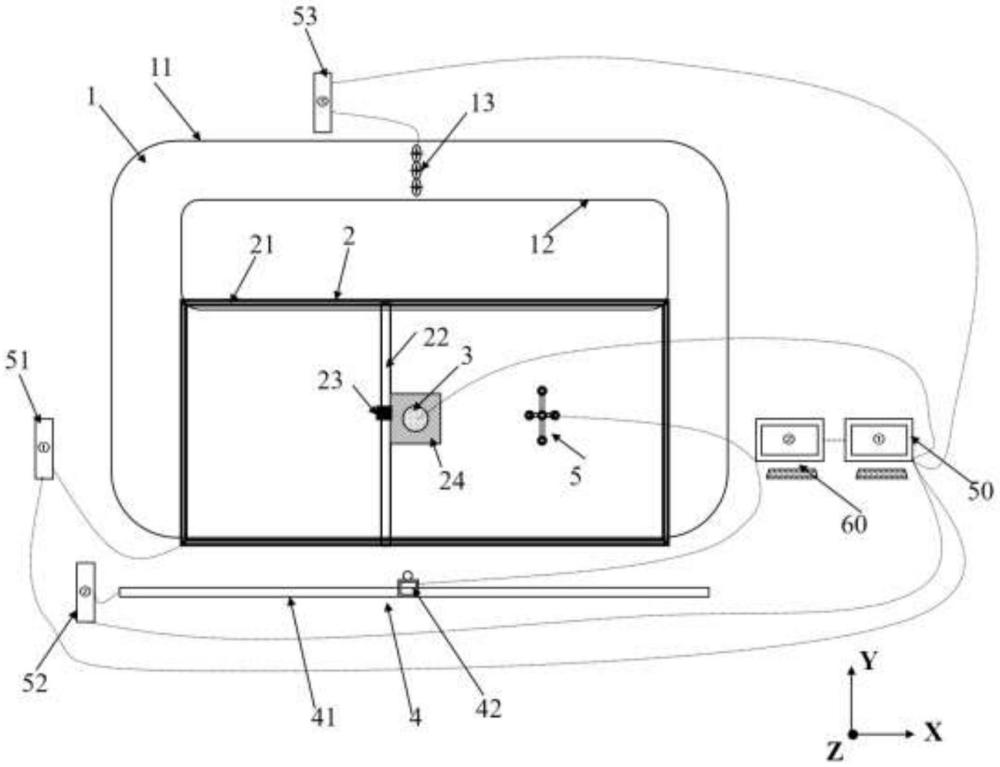
2、本发明的技术方案是:本发明所述的一种深海采矿海底羽流扩散综合实验设备,包括实验水池、滑台模组、沉积物混合系统、摄像系统、在线浊度计组、设备控制端、滑台控制器、相机滑动控制器、造流控制器和实验监测端;
3、所述实验水池包括实验室水池外壁、实验室水池内壁及造流模组,
4、所述实验室水池外壁、实验室水池内壁形成循环水槽,
5、所述造流模组由排布的喷水螺旋桨组成,并通过导线连接在造流控制器上,所述在造流控制器通过导线连接在设备控制端上。
6、进一步的,所述滑台模组安置在实验水池中,包括x向滑轨、y向滑轨、z向滑轨和支撑平台,所述支撑平台安置在y向滑轨、z向滑轨的连接处,在所述支撑平台安置有沉积物混合系统;
7、所述滑台模组通过导线连接在滑台控制器上,所述滑台控制器通过导线连接在设备控制端上。
8、进一步的,所述摄像系统包括轨道模组及安置在轨道模组上的高速相机;
9、所述在线浊度计组通过导线连接在高速相机上,所述轨道模组通过导线连接在相机滑动控制器上,所述相机滑动控制器通过导线连接在设备控制端上;
10、进一步的,所述沉积物混合系统通过导线连接在设备控制端上,包括沉积物混合搅拌桶、着色取样罐、第一计量泵、第二计量泵、在线流量计、在线浊度计、三通电磁阀、单片机及喷头接口;
11、所述沉积物混合搅拌桶包括搅拌桶桶体及搅拌桶顶盖,所述搅拌桶顶盖通过插销开关安装在搅拌桶桶体的上方,在所述搅拌桶桶体中安置有搅拌桨,在所述搅拌桨的顶端安置有搅拌电机,在所述搅拌桶顶盖的两端分别开设有注水口及物料口;
12、所述着色取样罐罐体包括着色取样罐罐体及着色取样罐顶盖,在所述着色取样罐罐体中安置有着色取样罐搅拌桨,在所述着色取样罐搅拌桨的顶端安置有混合电机,在所述着色取样罐顶盖的两端分别开设有取样口塞及着色剂口。
13、进一步的,在所述沉积物混合搅拌桶与着色取样罐的连接的线路中安置有第一计量泵,在所述着色取样罐与在线流量计连接的线路中安置有第二计量泵,所述第一计量泵与第二计量泵通过导线相连,
14、所述在线流量计通过线路与在线浊度计相连,所述在线浊度计通过线路与喷头接口相连,
15、在所述在线浊度计与喷头接口连接的线路上安置有三通电磁阀;
16、所述在线流量计、在线浊度计及三通电磁阀通过线路连接在单片机上,所述混合电机通过线路连接在单片机上,所述单片机的另一端通过线路连接在设备控制端上;
17、所述三通电磁阀还通过线路连接在沉积物混合搅拌桶上;
18、所述第二计量泵、在线流量计、在线浊度计、三通电磁阀和管系共同构成一个循环。
19、进一步的,所述喷头接口连接端配有螺纹接口,以便于安装不同形式的喷射结构。
20、进一步的,所述设备控制端与实验监测端之间通过无线信号相连接。
21、进一步的,在所述滑台模组的z向滑轨的底部固定有喷射口或连接带喷头的可运动矿车模型;
22、在所述支撑平台上还可安置有矿车模型运动控制器,所述矿车模型运动控制器通过线路与可运动矿车模型相连。
23、进一步的,所述实验室水池外壁及实验室水池内壁均由带有加强骨架筑起的壁面,其采用的材料是玻璃-钢骨架结构、混凝土-钢架结构或亚克力板-钢骨架结构等中的一种;
24、所述实验室水池外壁对应摄像系统一侧的外壁面为玻璃或透明亚克力板组成。
25、进一步的,所述的一种深海采矿海底羽流扩散综合实验设备的控制方法,其具体操作步骤如下:
26、一、沉积物混合系统的混合喷泵控制步骤如下:
27、(1):布置好实验装置并在沉积物混合搅拌桶内注入实验用量的水和沉积物;启动搅拌电机进行搅拌;
28、(2):在设备控制端输入目标试验速度v、目标实验浊度u、喷射管径d、监测周期t和允许相对速度误差e1、允许相对浓度误差e2;
29、其中目标实验速度v=m/4πd2;实际的控制信号是计量泵的单位流量m;
30、(3):单片机控制第一计量泵以目标实验速度v所对应的转速工作t时刻;
31、(4):单片机判断是否有t≥r/8v*πd2;r为着色取样罐的容积、d为连接管道的直径;此式用于控制混合物泵送体积达着色取样罐体积的一半;
32、(4.1):当单片机判断t≥r/8v*πd2时,进入第(5)步工作;
33、(4.2):当单片机判断没有t≥r/8v*πd2时,进入第(3)步循环;
34、(5):单片机控制混合电机工作搅拌,控制第二计量泵以目标实验速度v所对应的转速工作,控制三通电磁阀联通沉积物混合搅拌桶;在线流量计、在线浊度计持续监测过流混合物的速度和浊度,并将信号传递给单片机;单片机基于在线流量计、在线浊度计传递来的数据计算监测周期t内的平均速度va和平均浊度ua;
35、(6):单片机判断是否有丨v-va丨/v≤e1;
36、(6.1):当单片机判断丨v-va丨/v≤e1时,进入第(7)步工作;
37、(6.2):当单片机判断没有丨v-va丨/v≤e1时,进入第(5)步循环;
38、(7):单片机判断是否有丨u-ua丨/u≤e2;
39、(7.1):单片机判断丨u-ua丨/u≤e2时;进入第(8)步工作;
40、(7.2):单片机判断没有丨u-ua丨/u≤e2时,进入第(5)步循环;
41、(8):通过着色剂口加入着色剂;同时单片机控制三通电磁阀联通喷头接口;
42、二、摄像系统的移动监测控制步骤如下:
43、(1):调整高速相机的视窗,使喷射源位于视窗中心位置,并通过视窗z方向的实际尺寸与像素尺寸比例进行尺寸标定,从而在实验过程中通过标定的比例将像素尺寸转化为实际尺寸,以计算羽流的扩散情况;
44、(2):开始实验,高速相机监测羽流扩散区的扩散形态,并将图像信息实时传递给实验监测端;
45、(3):实验监测端识别羽流扩散的最外缘轮廓,并计算喷射源离x方向轮廓最外缘的距离,通过单位时间t的窗中心离x方向轮廓最外缘的距离lt初始值lt1,结束值lt2;
46、(4):通过公式(lt1-lt2)/(t1-t2)计算高速相机视窗内的vx,并通过可视化处理,构建vx随时间的变化曲线图;
47、(5):实验监测端判断喷射源和羽流轮廓x方向最外缘是否同时处于视窗内;羽流轮廓的识别采用灰度处理算法;
48、(5.1):当喷射源和羽流轮廓x方向最外缘同时处于视窗内时,循环步骤;
49、(5.2):当喷射源和羽流轮廓x方向最外缘不同时处于视窗内时,进入步骤;
50、(6):基于喷射源和羽流轮廓x方向最外缘离开视窗时刻tf的速度vxf,设备控制端控制相机滑动控制器以速度vxf向羽流扩散x方向运动,同时高速相机监测羽流扩散区的扩散形态,并将图像信息实时传递给实验监测端;
51、(7):实验监测端识别羽流扩散的最外缘轮廓,并计算视窗中心离x方向轮廓最外缘的距离ld,进一步地通过单位时间t的窗中心离x方向轮廓最外缘的距离ld初始值ld1,结束值ld2;
52、(8):通过公式(ld2+vxf(或vl)*t-ld1)/t计算喷射源和羽流轮廓x方向最外缘离开视窗后的单位时间速度vl,并通过可视化处理,构建vl随时间的变化曲线图;仅在第一步时采用vxf,其余循环均采用前一步循环得到的vl;
53、(9):设备控制端控制相机滑动控制器以速度vl向羽流扩散x方向运动;
54、(10):实验监测端判断高速相机是否滑至极限;
55、(10.1):当实验监测端判断高速相机滑至极限时,进入步骤(11);
56、(10.2):当实验监测端判断高速相机未滑至极限时,循环步骤(6);
57、(11):停止滑动,高速相机保持在极限位置,继续观测;
58、(12):实验监测端判断实验监测是否结束;
59、(12.1):当实验监测端判断实验监测结束时,控制结束;
60、(12.2):当实验监测端判断实验监测未结束时,循环步骤(11)。
61、本发明的原理是:
62、1、本发明通过排布的喷水螺旋桨组成的造流模组13,与循环水池构造,实现了水池造流;
63、2、本发明通过沉积物物料、水的两次混合,并通过在线监测和智能控制方法共同实现沉积物浊液的定速、定浊度、着色喷泵;
64、3、本发明通过像素尺寸标定,对羽流的实际扩散速度进行标定;并通过迭代算法,控制高速相机沿滑台移动,以拍摄更广阔的羽流扩散范围。
65、本发明的有益效果是:1、本发明通过循环水池造流,在实验中考虑了海底底流对羽流扩散的影响,这是先前的实验手段所不具备的有益效果;2、本发明通过在线监测和智能控制方法协同实现了沉积物浊液的定速、定浊度、着色喷泵,避免了混合液在不稳定阶段直接喷入水池造成较大的实验误差,同时污染实验环境的情况,提升了实验精度和实用性;3、本发明通过像素尺寸标定和高速相机跟随,实现了大范围扩散情况下羽流扩速度的实时可视化呈现。
- 还没有人留言评论。精彩留言会获得点赞!