一种基于可变光纤分束器的谐振式微光陀螺及其闭环控制方法
本发明属于谐振式光学陀螺,具体地,涉及一种基于可变光纤分束器的谐振式微光陀螺及其闭环控制方法。
背景技术:
1、谐振式光学陀螺(resonant optic gyro,rog)是一种在惯性空间中利用sagnac效应测量载体角速度的传感器,广泛应用于航空、航天、航海、医疗等众多领域。rog可在减少体积和成本的情况下达到较高的检测精度,同时也可减小由环境引起的非互易性误差。在微小卫星、微型无人机迅猛发展的驱使下,基于微腔的小型化、高精度rog成为了研究重点之一。回音壁模式(whispering gallery mode,wgm)谐振腔基于光的全内反射原理,将入射光束缚在腔体内,最高可实现109量级的超高品质因数(quality,q),且q值越大,陀螺的分辨率越高。同时,由于wgm谐振腔具备极窄的谱线线宽和极小的模式体积,对外界扰动非常敏感,极有望用以实现高灵敏度、高精度的微型rog。
2、然而,目前已报道的rog因受到克尔效应、shupe效应、偏振噪声和背向散射噪声等噪声影响,仍未达到理论精度。通过精心调控入射光功率可有效抑制克尔效应和光热效应,而由腔体表面缺陷引起的背向散射噪声通常采用宽谱光源降低相干长度,或采用窄线宽光源利用调制解调技术进行载波抑制或大频差滤波抑制,但仍有残余背向散射噪声混杂在待测信号中,且经常忽略系统延时和相位波动在解调过程中对陀螺灵敏度的影响。另一种采用光开关分离信号光和背向散射光的时分复用抑制方案虽能够从理论上有效提升检测精度,但仅可形成单闭环结构,导致rog的标度因数线性度差、动态范围小。可变光纤分束器通过电压调控既可充当光开关,又可实现50:50分束器功能以形成双闭环结构,有望在实现小型rog的同时提高检测精度。
技术实现思路
1、针对传统rog体积大和精度较低的缺点,本发明提出了一种基于可变光纤分束器的谐振式微光陀螺及其闭环控制方法,设计施密特型闭环切换、线性区判断方案和自动复位操作实现双闭环结构,提升rog输出的线性度和动态范围。
2、本发明通过以下技术方案实现:
3、一种基于可变光纤分束器的谐振式微光陀螺:
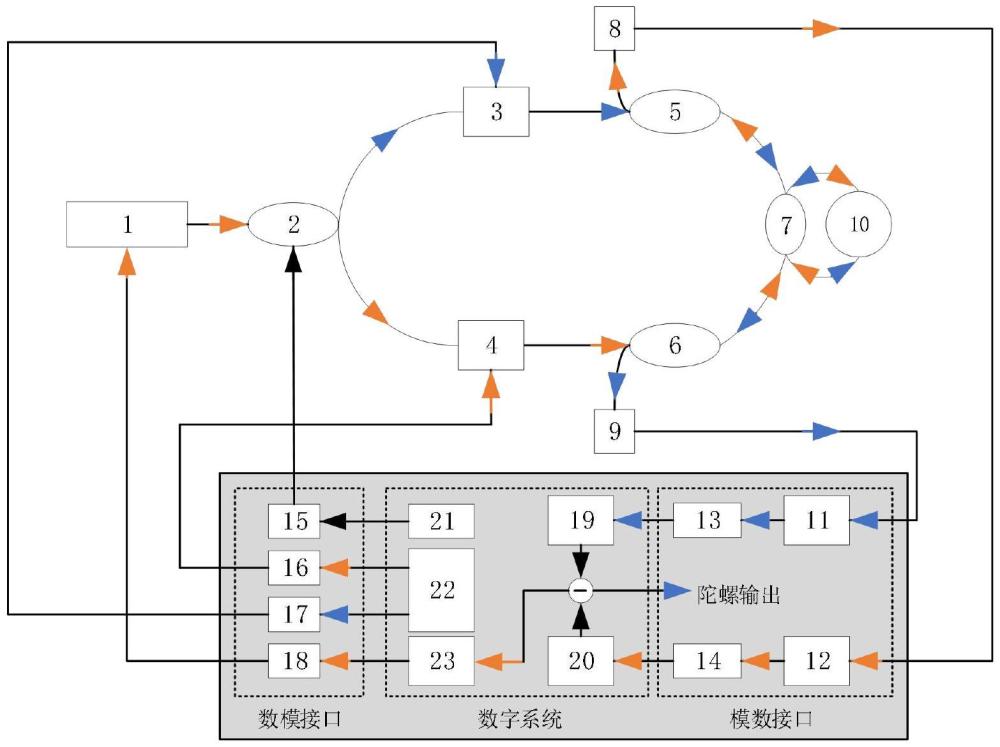
4、所述谐振式微光陀螺包括激光器、可变光纤分束器、相位调制器pmⅰ、相位调制器pmⅱ、环形器ⅰ、环形器ⅱ、95%2×2耦合器、光电探测器pdⅰ、光电探测器pdⅱ、回音壁谐振腔、数模接口、数字系统和模数接口;
5、所述激光器分别与可变光纤分束器和数模接口相连接,所述可变光纤分束器分别与相位调制器pmⅰ和相位调制器pmⅱ相连接,所述相位调制器pmⅰ分别与环形器ⅰ和数模接口相连接,所述相位调制器pmⅱ分别与环形器ⅱ和数模接口相连接;
6、所述环形器ⅰ分别与95%2×2耦合器和光电探测器pdⅰ相连接,所述环形器ⅱ分别与95%2×2耦合器和光电探测器pdⅱ相连接,所述光电探测器pdⅰ、光电探测器pdⅱ均和模数接口相连接;
7、所述95%2×2耦合器与回音壁谐振腔相连接;
8、所述数模接口与模数接口通过数字系统相连接。
9、进一步地,所述数模接口包括数模转换器adcⅰ、数模转换器adcⅱ、数模转换器adcⅲ和数模转换器adcⅳ;
10、所述数模转换器adcⅰ与可变光纤分束器相连接;
11、所述数模转换器adcⅱ与相位调制器pmⅱ相连接,
12、所述数模转换器adcⅲ与相位调制器pmⅰ相连接,
13、所述数模转换器adcⅳ与激光器相连接。
14、进一步地,所述数字系统包括正交解调模块ⅰ、正交解调模块ⅱ、时分复用与闭环切换模块、调制信号发生模块和激光器锁频控制模块;
15、所述调制信号发生模块分别与数模转换器adcⅱ和数模转换器adcⅲ相连接,
16、将所述正交解调模块ⅰ和正交解调模块ⅱ输出的解调信号相减后得到两路信号,用于实现激光器锁频,并作为陀螺系统输出;
17、所述激光器锁频控制模块与正交解调模块ⅰ和正交解调模块ⅱ的相减信号相连接。
18、进一步地,所述模数接口包括低通滤波器ⅰ、低通滤波器ⅱ、模数转换器adcⅰ和模数转换器adcⅱ;
19、所述低通滤波器ⅰ分别与光电探测器pdⅱ和模数转换器adcⅰ相连接;所述低通滤波器ⅱ分别与光电探测器pdⅰ和模数转换器adcⅱ相连接;
20、所述模数转换器adcⅰ与正交解调模块ⅰ相连接;所述模数转换器adcⅱ与正交解调模块ⅱ相连接。
21、一种基于可变光纤分束器的谐振式微光陀螺的闭环控制方法:
22、所述闭环控制方法具体为:
23、所述激光器发出的光束经过可变光纤分束器分束,分束后的光束分别输入至相位调制器pmⅰ和相位调制器pmⅱ进行相位调制;
24、经过相位调制器pmⅰ调制的光束进入环形器ⅰ,经过相位调制器pmⅱ调制的光束进入环形器ⅱ,环形器ⅰ和环形器ⅱ输出的光束经过95%2×2耦合器进行合并,并输入至回音壁谐振腔;
25、光束在回音壁谐振腔内多次反射,从回音壁谐振腔中反射出的光束再次经过95%2×2耦合器,分别进入环形器ⅰ和环形器ⅱ;
26、进入环形器ⅰ的光束由光电探测器pdⅰ转化为电压信号,经过低通滤波器ⅰ滤除高频噪声后由模数转换器adcⅰ转换为数字信号,送入正交解调模块ⅰ;
27、进入环形器ⅱ的光束由光电探测器pdⅱ转化为电压信号,经过低通滤波器ⅱ滤除高频噪声后由模数转换器adcⅱ转换为数字信号,送入正交解调模块ⅱ;
28、将所述正交解调模块ⅰ和正交解调模块ⅱ输出的解调信号相减后得到两路信号,其中一路输入至激光器锁频控制模块,另一路信号作为陀螺系统输出。
29、进一步地,输入至激光器锁频控制模块的一路信号,经数模转换器adcⅳ转换成数字电信号,激光器接收数字电信号以调节输出频率,
30、同时激光器锁频控制模块产生的信号给到调制信号发生模块,调制信号发生模块产生两路正弦电信号,经过数模转换器adcⅱ和数模转换器adcⅲ分别给到相位调制器pmⅱ和相位调制器pmⅰ;相位调制器pmⅱ和相位调制器pmⅰ根据接收到的信号调整相位。
31、进一步地,所述时分复用与闭环切换模块通过数模转换器adcⅰ控制可变光纤分束器,根据系统敏感到角速度对应的解调输出电压,通过施密特型判断方案和自动复位操作,实现单双闭环切换。
32、进一步地,所述施密特型判断方案具体为,设置了低阈值电压vsetl、高阈值电压vset_h和计数器计时时间cnt_time;
33、当解调输出电压超过高阈值电压vset_h且计时达到cnt_time,flag信号置为-1,时分复用与闭环切换模块通过模数转换器adcⅰ使可变光纤分束器处于50:50光耦合器状态,调制信号发生模块通过模数转换器adcⅱ在原有正弦波调制信号上,叠加锯齿波移频信号,在相位调制器pmⅱ上完成第二闭环,使系统从单闭环状态切换至双闭环状态;
34、当解调输出电压小于低阈值电压vset_l且计时达到cnt_time,flag信号置为+1,时分复用与闭环切换模块通过模数转换器adcⅰ使可变光纤分束器处于光开关状态,调制信号发生模块仅通过模数转换器adcⅱ在相位调制器pmⅱ上进行正弦波调制,系统从双闭环状态切换至单闭环状态;
35、在单闭环状态下,通过模数转换器adcⅰ和模数转换器adcⅱ分别采集两路光对应的背向散射光,使用滑动均值实时更新采集值,当系统切换至双闭环状态后,将对应均值作为误差补偿因子优化双闭环状态下的正交解调输出。
36、一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
37、一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现上述方法的步骤。
38、本发明有益效果
39、本发明采用高q值的wgm谐振腔作为核心敏感器件减少体积并提高灵敏度,基于可变光纤分束器进行时分复用分离背向散射光、采用正交锁相放大器对残余背向散射噪声进行载波抑制,有效提高rog精度、灵敏度和鲁棒性,设计施密特型闭环切换、线性区判断方案和自动复位操作实现双闭环结构,提升rog输出的线性度和动态范围。
40、通过使用可变光纤分束器和相位调制器,系统能够更精确地控制光束的相位和强度,从而提高测量精度和灵敏度;激光器锁频控制模块和闭环控制使得激光器的频率能够动态锁定到谐振腔的谐振频率上,提高了系统的稳定性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!