一种基于电致发光效应的复合绝缘子电场畸变检测方法与流程
本发明涉及电力设备监测,具体涉及一种基于电致发光效应和智能算法的复合绝缘子电场畸变检测系统及其智能诊断方法。
背景技术:
1、随着我国特高压电网工程的进一步建设,高电压等级输电线路将运用更多数量的复合绝缘子。由于设计缺陷、材料劣化、外界环境等因素,复合绝缘子可能会产生缺陷,并引起局部电场畸变,威胁电力系统安全运行。传统的电场畸变检测技术主要依赖于传感器对电场强度的测量,然后通过复杂的数学算法对电场分布进行分析。然而,复合绝缘子的结构复杂,存在多种因素影响电场分布,例如表面污染、机械应力、温度变化等,这使得传统技术往往无法准确捕捉到电场畸变变化,导致监测精度不高。同时,依赖于电场传感器检测复合绝缘子电场畸变的技术耗费大量人力,对操作人员的技术水平有很高的要求。因此,亟需一种简便直观、节省人力的复合绝缘子电场畸变自显示技术。
技术实现思路
1、基于上述现有技术的不足,本发明通过引入电致发光效应和白显示技术,实现对电场畸变的实时监测,以便及时发现和处理复合绝缘子潜在的故障,采取相应的维护措施,降低了进一步的故障风险,提高了电力系统的可靠性和安全性。此外,通过智能化监测手段,能够更好地实现对电力系统的远程监控和故障预警,提高了电力系统的智能化水平,促进了电力行业的发展和进步。
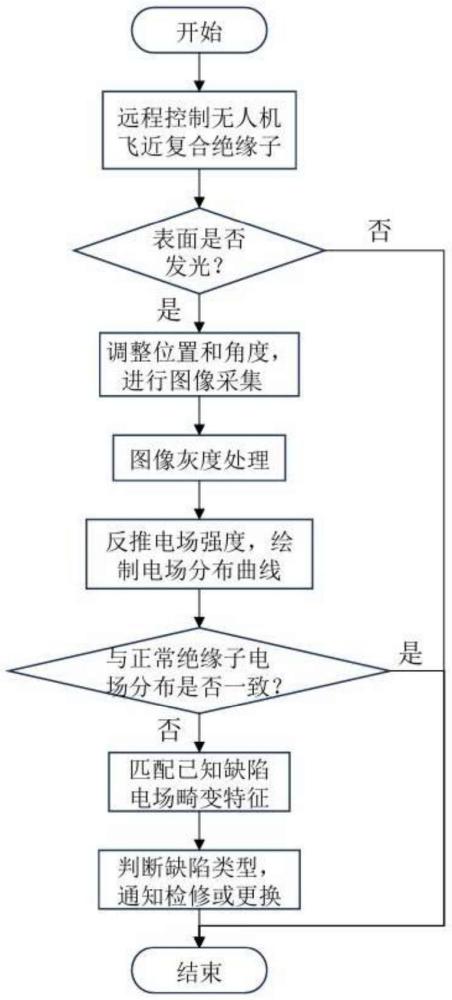
2、本发明的技术方案为:一种基于电致发光效应的复合绝缘子电场畸变检测方法,包括步骤:
3、步骤1,制备电致发光复合涂层材料,包括基体材料和荧光材料,采用硅橡胶作为基体材料,采用zns:cu作为荧光材料;
4、步骤2,利用无人机搭载高分辨率相机,结合优化的航线设计,获取全面且清晰的绝缘子表面图像;通过算法对图像数据进行预测,精准捕捉电场分布的局部与全局特征,降低建模误差;
5、步骤3,通过对比实际测得的电场分布曲线与理论曲线,分析电场畸变,利用特征匹配技术诊断潜在缺陷。
6、进一步,步骤1中,采用zns:cu作为荧光材料,zns:cu复合涂层材料的具体制备与涂覆流程如下:首先,称取所需质量的硅橡胶材料,倒入烧瓶中并加热至60℃以提高基体流动性,按比例添加固化剂,再加入zns:cu荧光材料和钛酸钡填料,然后,保持60℃加热不变,持续搅拌1h,之后进入真空干燥箱进行抽真空操作,直至表面无气泡,最终,采用喷涂方式将zns:cu复合涂层材料涂覆在已经清洁和处理过的复合绝缘子表面,确保涂层厚度均匀且完整,在涂覆过程中应避免产生气泡、空隙缺陷,采用适当的涂覆速度和涂覆厚度控制方法来保证涂层质量,经高温固化后,得到最终涂覆电致发光复合涂层材料的复合绝缘子。
7、进一步,步骤2的具体过程为:
8、图像采集部分:采用无人机搭载相机进行拍摄,选择合适型号的无人机,搭载高分辨率相机,确保能够在飞行过程中获取清晰、高质量的图像,同时相机能够动态调整拍摄角度,按照预先设计的航线,控制无人机进行自主飞行,调整无人机与复合绝缘子表面距离,控制姿态与相机角度,拍摄复合绝缘子表面的图像;
9、图像处理分析部分:主要基于发光图像推导绝缘子表面电场分布从而为后续缺陷诊断提供依据,基于场强越大电致发光材料发光强度越大的原理,可以进一步获得场强与发光强度的关系;首先,对采集到的图像进行去噪处理,消除可能存在的干扰,提高图像质量和清晰度,之后,使用图像处理软件,将预处理后的图像转换为灰度图像,并提取每个像素点的灰度值信息;最终,建立基于灰度值的电场大小模型,根据实验测得的光强-电场关系,对每个像素点的灰度值进行转换,得到相应的电场大小值。
10、进一步,步骤2的具体步骤如下:
11、步骤2.1,无人机设定
12、选择合适型号的无人机是确保图像采集质量的关键,以下是具体的选择标准:
13、飞行稳定性:无人机应具有良好的飞行稳定性,以减少因振动或风力导致的图像模糊;
14、负载能力:无人机需具备足够的负载能力,以搭载高分辨率相机及其他传感器;
15、续航时间:选择续航时间较长的无人机,以确保能够完成整个航线的图像采集任务;
16、因此,选择的无人机具备高负载能力和长续航时间,并且配备rtk模块,能够实现厘米级的飞行精度;
17、接着,将高分辨率相机固定在无人机上,并确保相机可以动态调整拍摄角度,具体安装步骤如下:
18、选择高分辨率相机并使用防震固定支架,将相机稳固安装在无人机底部,确保在飞行过程中不会晃动;为确保相机应能够实现动态调整拍摄角度,以适应不同的拍摄需求,使用云台稳定器来实现这一功能;
19、最后是航线的设计,按照预先设计的航线,控制无人机进行自主飞行,调整无人机与复合绝缘子表面距离,控制姿态与相机角度,拍摄复合绝缘子表面的图像,具体步骤如下:
20、使用航线规划软件(dji terra)预先设定飞行路径,确保无人机能够覆盖所有待检测的复合绝缘子表面;
21、飞行参数设置:飞行高度(h):根据绝缘子的高度和相机的焦距,设定合适的飞行高度;拍摄间隔(i):设定拍摄间隔,以确保图像之间有足够的重叠度,推荐值为3秒;
22、自主飞行:启动无人机的自主飞行模式,按照预定的航线进行飞行,同时动态调整相机角度以获取最佳拍摄效果;
23、数据监控:在飞行过程中,实时监控无人机的状态和图像采集情况,确保数据的准确性和完整性;
24、步骤2.2,图像采集与预处理;
25、无人机沿着预定航线飞行,拍摄复合绝缘子表面的图像,为了确保采集到的图像能够全面、准确地反映复合绝缘子表面的信息,需进行如下设置:
26、拍摄角度:设定相机的俯仰角度(θ)和偏航角度(φ),以获得不同角度的图像;
27、飞行速度:设定适当的飞行速度(v),以保证图像的清晰度;
28、图像拍摄:无人机按照设计好的航线飞行,并在飞行过程中持续拍摄复合绝缘子表面的图像;
29、覆盖范围:为了确保完整的表面信息,图像拍摄应覆盖复合绝缘子的所有区域,包括上部、中部和下部;
30、图像预处理包括去噪处理和灰度转换,旨在提高图像质量和提取有用的信息;
31、去噪处理:对采集到的图像进行去噪处理,以消除可能存在的干扰;
32、其中,高斯滤波是一种线性平滑滤波方法,常用于去除图像中的高频噪声,高斯滤波的公式为:
33、
34、其中,g(x,y)是高斯函数在点(x,y)处的值,通常表示图像在点(x,y)的像素值经过高斯滤波后的值,x为距离高斯函数中心的水平方向上的偏移量,单位为像素,y为距离高斯函数中心的垂直方向上的偏移量,单位为像素,σ为标准差,它决定了高斯分布的宽度(即平滑的程度),e为自然对数的底;
35、灰度转换:将预处理后的图像转换为灰度图像,并提取每个像素点的灰度值信息,灰度值的计算公式为:
36、g(x,y)=0.299·r(x,y)+0.587·g(x,y)+0.114·b(x,y)
37、其中,r(x,y)、g(x,y)、b(x,y)分别是像素点(x,y)的红、绿、蓝分量值;
38、步骤,2.3,电场分布建模;
39、不同位置灰度值与施加电压大小的关系如下所示:
40、
41、其中,i、r、g、b分别是在电压u下不同位置(x,y)的灰度值、红色值、绿色值、蓝色值,取值均为0-1。
42、校准点处电场强度与施加电压大小的关系如下所示:
43、e(x0,y0)=ku (2)
44、其中,k为对应系数,由仿真和试验数据获得。
45、校准点处电场强度与灰度值大小关系如下所示:
46、e(x0,y0)=f(i(x0,y0,u)) (3)
47、其中,f为关系函数。
48、由此,根据灰度值大小可以反推实际的电场强度,如下所示:
49、e(x,y,u1)=f(i(x,y,u1)) (4)
50、其中,u1为位置(x,y)处的对应电压值。
51、进一步,步骤3的具体过程为:
52、步骤3.1,首先将每个像素点的电场大小值绘制成电场分布图,以直观展示复合绝缘子表面的电场分布情况;
53、步骤3.2,然后将实际预测测得的电场分布图与理论电场分布进行比对,根据差异分析确定是否存在电场畸变,以及畸变的程度和范围,将电场畸变位置与已知的电场畸变特征进行匹配,识别出可能的缺陷类型和位置,包括内部气孔、局部放电,从而进行缺陷诊断;
54、步骤3.3,执行器操作:当检测到电场畸变或缺陷时,系统发出报警信号,同时记录下缺陷的位置和类型,并根据预设的报警级别采取相应的处理措施,通知维修人员进行检修更换。
55、进一步,步骤3.2-3.3的具体步骤如下:
56、步骤3.2,数据准备:灰度图像转换为图结构,将预处理后的灰度图像数据转换为图结构,节点(node)为图像中的每个像素点,边(edge)为相邻像素点之间的连接关系;图像大小为m×n,则节点数为m×n;
57、图结构表示:
58、g=(v,e)
59、其中,v表示节点集合,即像素点;e表示边集合,即相邻像素点之间的关系;
60、灰度值转换:为了将图像中的灰度值转换为相应的电场强度值,需要根据实验测得的光强-电场关系:
61、e(x0,y0)=f(i(x0,y0,u))
62、接着是利用lssvm-adaboost模型训练上述光强-电场关系;
63、输入特征,灰度值:表示像素点的亮度信息,记为i(x,y);
64、像素点坐标:表示像素点的位置,记为(x,y);
65、输出数据:目标变量电场强度e;
66、lssvm-adaboost模型介绍:
67、最小二乘支持向量机(lssvm)的目标函数:
68、
69、其中,w是权重向量,b是偏置项,e是误差向量,γ是正则化参数,是样本i真实值与预测值之间偏差的平方,n为样本数量,min是最小值函数;
70、约束条件:
71、yi=wtφ(xi)+b+ei,i=1,...,n
72、其中,yi是第i个样本的实际输出值(真实值),φ(xi)表示第i个样本xi的特征映射,i=1,...,n是样本的索引;
73、adaboost算法目标:迭代地调整权重,增强模型对难分类样本的关注;
74、权重更新:
75、
76、其中,wi是第i次迭代时的样本权重,αi是第i次迭代时的模型权重,i是指示函数,如果弱分类器hi对样本x的预测结果hi(x)不等于真实标签y,则该函数取值为1,否则取值为0,hi是第i次迭代的弱分类器,y表示样本x的真实标签,
77、lssvm-adaboost结合模型,目标函数和约束条件:
78、
79、yi=wtφ(xi)+b+ei,i=1,…,n
80、实施步骤:
81、初始化权重:
82、
83、训练弱分类器:对于每一轮迭代,使用lssvm训练一个弱分类器,计算误差ei并更新权重;
84、模型融合:使用加权投票的方式融合多个弱分类器的输出;
85、迭代更新:重复上述过程,直到达到预设的迭代次数或误差阈值;
86、训练完成后,模型能够预测图像中每个像素点的电场强度值;
87、分布图对比:将实际测得的电场分布图与理论电场分布进行比对,比对方法使用图像差异计算,本专利选择均方误差(mse):
88、
89、其中,n是图像中的像素总数,emeasured(i)是实际测得的第i个像素点的电场强度值,etheoretical(i)是理论模型中第i个像素点的电场强度值;
90、缺陷识别:将电场畸变位置与已知的电场畸变特征进行匹配,识别出可能的缺陷类型和位置,包括内部气孔、局部放电;
91、步骤3.2,执行器操作;
92、报警信号:当检测到电场畸变或缺陷时,系统发出报警信号,并记录下缺陷的位置和类型,根据预设的报警级别,采取相应的处理措施;
93、执行器操作是系统中至关重要的一部分,通过自动化控制系统,确保无人机在图像采集和电场分布检测中的精确执行;
94、执行器包括电机、舵机、相机云台,传感器包括gps模块、陀螺仪、加速度计、高度计;
95、调整飞行路径和相机参数的公式如下:
96、v=vbase+δv
97、h=hbase+δh
98、θ=θbase+δθ
99、ψ=ψbase+δψ
100、其中,v是调整后的飞行速度,h是调整后的飞行高度,θ是调整后的相机俯仰角,ψ是调整后的航向角,vbase、hbase、θbase、ψbase则分别是飞行速度、飞行高度、相机俯仰角、航向角的基础飞行数据,δv、δh、δθ、δψ是根据预测结果调整的飞行速度、飞行高度、相机俯仰角、航向角;
101、实时监控:实时监控无人机的飞行状态和图像采集情况,确保数据的准确和完整。
102、有益效果:
103、1.本发明综合利用电致发光效应和自显示技术,通过制备特定的发光复合涂层材料,实现对电场畸变的实时监测和缺陷诊断。同时,采用无人机搭载相机进行图像采集,结合图像处理技术,能够快速、准确地获取复合绝缘子表面的电场分布信息。最终,通过电场分布曲线对比和缺陷诊断算法,实现对复合绝缘子电场畸变的自动检测与报警,为电力系统的安全稳定运行提供可靠保障。本发明不仅简化了复合绝缘子电场检测的操作流程,降低了技术门槛,还节省了人力资源,并为电力系统的智能化管理提供了重要支持,推动了电力行业的发展与进步。
104、2.通过引入lssvm-adaboost算法,结合无人机和高分辨率相机的自动化控制系统,本发明显著提升了复合绝缘子表面电场分布建模的准确性和稳定性。首先,通过无人机灵活的航线设计和多角度拍摄,获取全面的绝缘子表面图像数据,确保数据的多样性和代表性。其次,利用lssvm-adaboost算法对图像数据进行多变量回归预测,有效捕捉电场分布中的局部和全局特征,显著降低了建模误差。实验验证表明,该模型在不同环境条件下均能保持较高的预测准确性。此外,模型优化后的电场分布图直观展示了绝缘子表面的电场变化,有助于快速识别电场畸变和潜在缺陷。总体而言,本发明的改进大幅提升了电场分布检测的效率和精度,为电力设备的维护和安全运行提供了可靠的技术支持。
- 还没有人留言评论。精彩留言会获得点赞!