一种非稳态工况下的增量式光编码器偏心误差自补偿方法
本发明属于仪器仪表技术与信号处理分析,具体涉及一种非稳态工况下的增量式光编码器偏心误差自补偿方法。
背景技术:
1、增量式光学编码器是一种利用圆光栅对机械设备的旋转角度位置进行测量的装置,主要由led、圆光栅盘和光敏芯片组成。当被测轴带动光栅转动时,光栅盘会将led发出的散射光转换成光斑,光敏芯片会根据光斑的形状和位置生成a、b和z三个相位的ttl信号,其中z相为零相位信号,而a、b相为正交编码信号,其包含角度和方向信息。在读取正交编码信号时,编码器的计数模式有全正交(4倍频)、半正交(2倍频)和单边计数三种模式。
2、在增量式光学编码器在制造与安装的过程中不可避免的会出现刻线、细分、偏心等误差,这些误差将会降低测角精度并使ias信号产生噪声。因此对编码器进行误差补偿以获取高精度ias信号这一方法具有重大的意义,如谐波补偿法、cet(constant elapsedtime)法、神经网络补偿法、多读数头法等误差补偿方法被提出用以消除编码器的偏心误差,从而提高ias信号的测量精度。值得注意的是谐波补偿法与cet法需要构建一个理想的标定环境;多读数头法需要增加编码器读数头,因此要对设备进行拆卸与改装这就造成了成本的上升与实施的困难;使用神经网络对编码器进行补偿需要大量的样本数据进行实验,并且存在迁移性差的问题。同时,除编码器外,电机、轴等零部件也存在偏心现象,且这些机械零部件偏心与编码器偏心对输出角度的影响相似。因此在不对编码器进行拆装与改造的前提下对编码器进行自标定是一个巨大的挑战。
3、随着ias信号研究的不断深入,在研究过程中发现在偏心与刻线形状误差的共同作用下ias信号会出现规律的交替性波动,为了探究ias信号波动与增量式光学编码器偏心误差之间联系,首先对增量式光学编码器的刻线误差、偏心进行分析,随后在考虑刻线误差的条件下建立了偏心误差模型,利用误差模型解释了偏心误差与刻线误差是如何相互作用,并产生规律性ias信号波动的,随后推导了利用ias信号对偏心误差进行估计与补偿的方法。通过仿真分析与实验验证证明了误差模型的正确性与所提误差补偿方法的有效性,并在精密光学旋转平台上对本文所提误差补偿方法的实际效果进行了量化评价。
技术实现思路
1、针对现有技术的问题,本发明提供了一种非稳态工况下的增量式编码器偏心误差自补偿方法,本发明利用了增量光学式编码器ias信号在偏心误差与刻线形状误差的共同作用下会产生规律的交替性波动这一特殊现象对编码器的偏心误差进行自估计,相比于cet(constant elapsed time)法、神经网络补偿法、多读数头法等误差补偿方法,本发明方法不需要对编码器进行改装与拆卸属于一种误差自补偿方法,且本方法可以在非稳态工况下对编码器误差进行补偿,因此具有低成本、无需拆卸、易实施等优点。
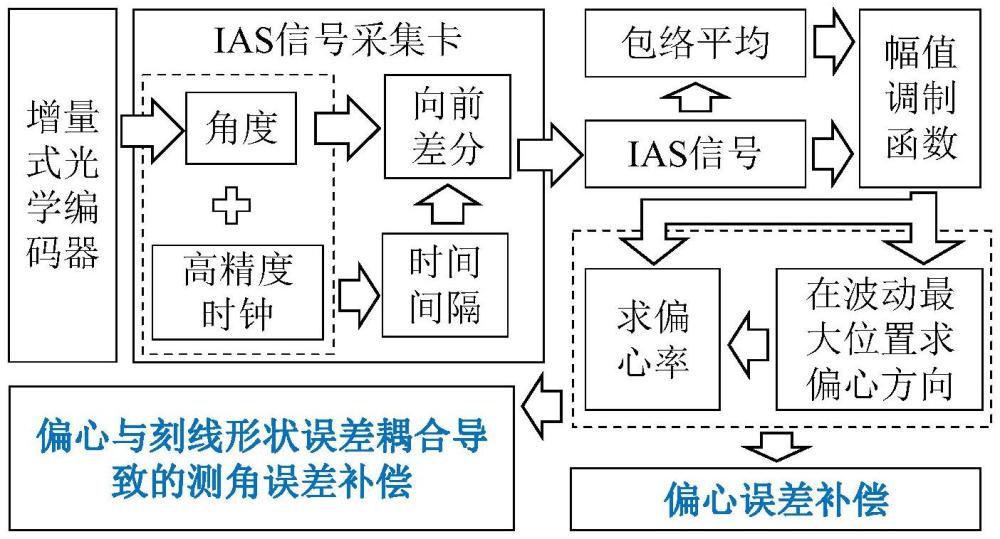
2、本发明非稳态工况下增量式编码器偏心误差自补偿方法如下:
3、(1)在2倍频下,同时采集增量式光编码器的a、b、z三个相位的角度信号,获得a相2倍频角度信号或b相2倍频角度信号;同时采集角度发生变化的时间间隔;
4、采用专利zl202110253437.6“一种无线传输的旋转编码器采集卡及应用”中采集卡采集角度信号与相应的时间间隔;
5、利用向前差分法将a相2倍频角度信号或b相2倍频角度信号转换为a相2倍频瞬时角速度信号或b相2倍频瞬时角速度信号(ias信号);
6、向前差分法计算公式为:
7、
8、式中,ω2为编码器a相或b相的2倍频瞬时角速度信号,θ2为编码器a相或b相的2倍频角度信号,△t为时间间隔,i为信号序号,即i=1、2、3.....;
9、(2)先对2倍频瞬时角速度信号中的进行刻线误差进行补偿,使用包络平均法对补偿后的ias信号中的交替性波动进行抑制,利用抑制交替性波动后的ias信号与原始ias信号计算幅值调制函数;使用幅值调制函数对偏心误差进行估计的原因是幅值调制函数能有效消除变速运动带来的趋势项与幅值调制;
10、所述包络平均法表示为:
11、
12、式中,en(·)表示包络平均技术,i(·)表示三次样条插值,表示上包络线,表示下包络线;因为偏心误差与刻线形状误差的共同作用下ias信号产生的波动为交替性波动,因此上下包络线表示为:
13、
14、所述幅值解调函数表示为:
15、
16、式中,表示计算得到幅值调制函数。
17、(3)利用步骤(2)得到的幅值调制函数对偏心误差的偏心方向进行估计,幅值调制函数a2的理论表达式为:
18、
19、式中:δθ2为输出角度的角度间隔,d表示光栅宽度,r′表示偏心轨迹到圆心的距离,r表示理论半径,i=1、2、3.....;
20、所述输出角度的角度间隔δθ2表示为:
21、
22、式中:m为编码器光栅数。
23、所述偏心轨迹到圆心的距离r′表示为:
24、
25、式中:表示原点为光栅圆心的任意角度,θe为偏心方向。
26、依据幅值调制函数a2的理论表达式,当满足如下关系时幅值调制函数的波动程度达到最大:
27、
28、将幅值调制函数波动程度最大时的θ2记作利用这一特殊位置可以计算偏心方向θe:
29、
30、4)利用步骤(2)中估计得到的幅值调制函数与偏心误差方向对偏心率进行估计,偏心率为:
31、
32、式中:参数k为:
33、
34、式中:参数γ为:
35、
36、(5)利用步骤(3)与(4)估计得到的偏心方向与偏心比可以对增量式光学编码器的偏心误差进行补偿,补偿公式为:
37、
38、式中,θ表示被测轴的实际转角,θ2为编码器输出的角度,θ1为仅受偏心误差干扰的角度,i=1、2、3.....。
39、本发明的有益效果是:使用ias信号波动对编码器偏心误差进行估计与补偿,可以在不对编码器进行拆装的前提下进行具有低成本、容易实施的特点。其次因为在估计偏心误差时是使用幅值调制函数进行的,所以本文所提方法得以在非稳态工况下使用,具有较强的抗干扰能力。相比于cet(constant elapsed time)法、神经网络补偿法、多读数头法等误差补偿方法,本发明所提方法不需要对编码器进行改装与拆卸,因此具有低成本、无需拆卸、易实施等优点,且本方法可以在非稳态工况下对编码器误差进行补偿,具有较强的抗干扰能力。
40、本发明所提出的偏心误差自补偿方法可以有效的对偏心引起的测角误差进行补偿,偏心误差是引起测角误差的主要原因,对偏心误差补偿之后可以有效提高增量式光学编码器的角度输出精度,从而实现在不对编码器进行拆卸与改装的前提下提高伺服系统的角度定位精度。
41、本发明方法适用于工业化生产和市场推广应用。
- 还没有人留言评论。精彩留言会获得点赞!