一种测量机上平面触测避障路径规划方法及装置与流程
本发明涉及三坐标检测,特别涉及一种测量机上平面触测避障路径规划方法及装置。
背景技术:
1、在三坐标检测技术领域,当前的主要挑战在于处理复杂工件的测量路径规划。特别是当工件表面包含凹槽和凸台时,直接使用cad模型数据进行避障路径规划显得不够高效。这是因为模型数据量巨大且处理复杂,转换为实际测量路径时常常不够灵活。
2、因此,相关技术涉及的方法在处理这些复杂几何形状时,避障路径规划的效率和准确性受到限制。为了改善这一情况,需要一种能够简化数据处理并提高路径生成效率的方法。
技术实现思路
1、本发明提供了一种测量机上平面触测避障路径规划方法及装置,所述技术方案如下:
2、一方面,提供了一种测量机上平面触测避障路径规划方法,所述方法包括:
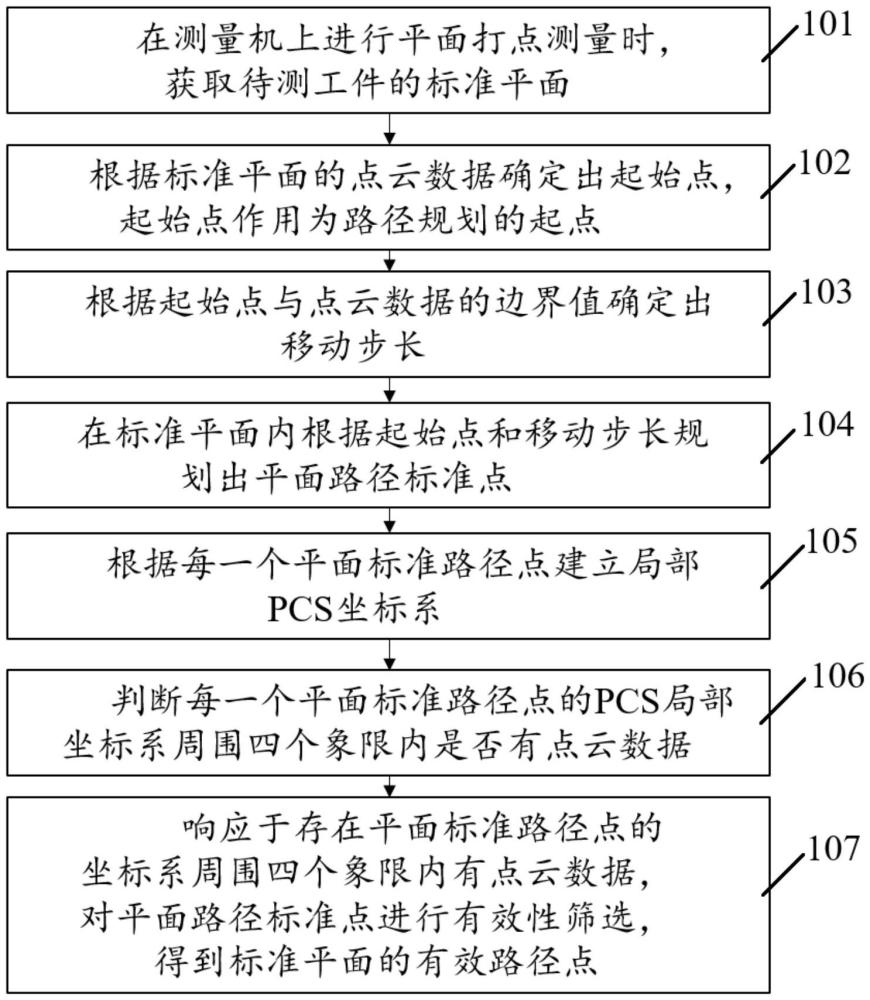
3、在测量机上进行平面打点测量时,获取待测工件的标准平面;
4、根据所述标准平面的点云数据确定出起始点,所述起始点作用为路径规划的起点;
5、根据所述起始点与所述点云数据的边界值确定出移动步长;
6、在所述标准平面内根据所述起始点和所述移动步长规划出平面路径标准点;
7、根据每一个平面标准路径点建立局部pcs坐标系,所述局部pcs坐标系下所述标准平面的点云数据变换到了xoy平面;
8、判断每一个平面标准路径点的pcs局部坐标系周围四个象限内是否有点云数据;
9、响应于存在所述平面标准路径点的坐标系周围四个象限内有点云数据,对所述平面路径标准点进行有效性筛选,得到所述标准平面的有效路径点,所述有效路径点为平面触测避障路径。
10、可选的,所述根据所述标准平面的点云数据确定出起始点,包括:
11、在所述标准平面内,计算各个点云数据三维的最小边界值minx、miny和minz,以及,最大边界值maxx、maxy和maxz;
12、将三维的最小边界值作为第一平面,记为pmin(minx,miny,minz);
13、将三维的最大边界值作为第二平面,记为pmax(maxx,maxy,maxz);
14、将所述第一平面和所述第二平面投影到输入平面上,记为输入平面planein;
15、根据点startx(pmax.x,0,0)和点endx(pmin.x,0,0)获得x起始线段linex;
16、根据点starty(0,pmin.y,0)和点endy(0,pmax.y,0)获得y起始线段liney;
17、根据所述x起始线段linex和所述y起始线段liney的交点确认为所述起始点,记为起始点pa。
18、可选的,所述方法还包括,包括:
19、响应于所述输入平面planein的法向量为(0,0,1)时,所述起始点pa表示为(pmin.x,pmax.y,pmin.z);
20、响应于所述输入平面planein的法向量为(1,0,0)时,所述起始点pa表示为(pmin.x,pmin.y,pmax.z);
21、响应于所述输入平面planein的法向量为(0,1,0)时,所述起始点pa表示为(pmin.x,pmin.y,pmax.z)。
22、可选的,所述根据所述起始点与所述点云数据的边界值确定出移动步长,包括:
23、将所述起始点pa与所述标准平面的点云数据最近的x轴距离记为startu,将所述第二平面pmax与所述标准平面的点云数据最近的x轴距离记为endu,将路径列数记为numu,将路径行数记为numv;
24、根据所述startu、所述endu和所述numu计算出横向移动步长xgap,计算过程为xgap=((pa-pmax)-startu-endu)/(numu-1);
25、将所述起始点pa与所述标准平面的点云数据最近的y轴距离记为startv;
26、将所述第二平面pmax与所述标准平面的点云数据最近的y轴距离记为endv;
27、根据所述startv、所述endv和所述numv计算出竖向移动步长ygap,计算过程为ygap=((pa-pmin)-startv-endv)/(numv-1);
28、根据所述横向移动步长xgap和所述竖向移动步长ygap确定出所述移动步长。
29、可选的,所述在所述标准平面内根据所述起始点和所述移动步长规划出平面路径标准点,包括:
30、根据所述横向移动步长xgap、所述竖向移动步长ygap、所述起始点pa、所述startu、所述endu、所述startv和所述endv得到规划出的平面路径标准点。
31、可选的,所述响应于存在所述平面标准路径点的坐标系周围四个象限内有点云数据,对所述平面路径标准点进行有效性筛选,得到所述标准平面的有效路径点,包括:
32、设置各个平面路径标准点的roi圆柱区域,其中,圆柱中心为对应的平面路径标准点,圆柱向量为输入平面的法向量,圆柱半径根据所述点云数据相邻点间最小距离确定;
33、在各个平面路径标准点的roi圆柱区域内,如果点云数据的数量小于预设数量,则判定当前roi圆柱区域对应的平面路径标准点为无效路径点并筛除;
34、在各个平面路径标准点的roi圆柱区域内,如果点云数据的数量不小于所述预设数量,则以当前roi圆柱区域对应的平面路径标准点为原点,以线段linex方向为x轴方向,线段liney方向为y轴方向建立坐标系;
35、响应于坐标系的四个象限内均有点云数据时,则判定当前的平面路径标准点为有效路径点。
36、另一方面,提供了一种测量机上平面触测避障路径规划装置,所述装置包括:
37、平面获取模块,用于在测量机上进行平面打点测量时,获取待测工件的标准平面;
38、起始点获取模块,用于根据所述标准平面的点云数据确定出起始点,所述起始点作用为路径规划的起点;
39、步长确定模块,用于根据所述起始点与所述点云数据的边界值确定出移动步长;
40、路径规划模块,用于在所述标准平面内根据所述起始点和所述移动步长规划出平面路径标准点;
41、坐标建立模块,用于根据每一个平面标准路径点建立局部pcs坐标系,所述局部pcs坐标系下所述标准平面的点云数据变换到了xoy平面;
42、象限判断模块,用于判断每一个平面标准路径点的pcs局部坐标系周围四个象限内是否有点云数据;
43、路径避障模块,响应于存在所述平面标准路径点的坐标系周围四个象限内有点云数据,对所述平面路径标准点进行有效性筛选,得到所述标准平面的有效路径点,所述有效路径点为平面触测避障路径。
44、另一方面,提供了一种计算机可读存储介质,所述存储介质存储有至少一条指令,所述至少一条指令用于被处理器执行以实现如上述方面所述的测量机上平面触测避障路径规划方法。
45、另一方面,还提供了一种计算机程序产品,该计算机程序产品存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述方面所述的测量机上平面触测避障路径规划方法。
46、本发明中,在数据量上进行了优化,通过只使用待测几何元素的点云数据,而非整个模型信息,显著降低了数据量,减少了计算和存储需求;提高了路径规划效率,点云数据使得路径规划算法能够更快速地生成有效路径,避免了因模型复杂性引起的处理延迟;实现精确避障,在生成标准路径时,通过避障处理,修正路径点以适应实际工件的几何特征,避免了与凹槽和凸台的干涉,确保了测量的准确性;路径有效性大大提升,通过设置roi区域并筛选无效路径点,提高了规划路径的有效性和测量精度平面触测避障路径平面触测避障路径。
- 还没有人留言评论。精彩留言会获得点赞!