基于权重调整的车辆定位方法及系统与流程
本技术涉及车辆定位领域,有关一种基于权重调整的车辆定位方法及系统,尤指一种通过调整行车影像权重值、定位资料权重值及惯性资料权重值,以产生定位坐标值的车辆定位方法及系统。
背景技术:
1、近年来自动驾驶是各大车厂竞相发展的技术领域,而随着人工智能以及硬件技术的蓬勃发展,未来主要交通道路工具都将逐渐被自动驾驶汽车所取代是必然的趋势。而定位方法则是自动驾驶领域中至关紧要的技术。在众多的公知技术当中,其中一种以多个摄影机作为主要感知,搭配人工智能深度学习,来检测周围环境与道路标线,达到交通感知巡航定位、变换车道和自动停车等驾驶辅助功能。然而过渡依赖摄影机,当遇到进出隧道光线反差过大的情况时,有可能导致行车影像无法同时显现出暗部及亮部的细节、或当遇到道路标线过多磨损的路段时,这些都容易导致行车影像定位判断失效或异常。此外,当冬天或雨天时,因摄影机镜头的物镜的内外温差较大,使得水气在物镜的外表面凝结,而产生镜片起雾的现象,或是雨天时雨水喷溅到摄影机镜头的物镜的外表面,使得所拍摄到的行车影像有部分区域模糊了,这些情况也都会造成行车影像定位判断失效或异常。另一种公知技术则是结合多台相机以及多个不同测距范围的光学雷达(lidar:light detectionandranging)。相机拍摄的行车影像能够判断出车道线的特征点,配合上精准度可以达到公分等级的光学雷达,再与矢量地图匹配,确实可以将车辆的所在位置精准定位在矢量地图上。然而,光学雷达虽然精准度高,但成本过高,车厂很难把制造成本压低,售价自然也无法降低,因此影响到自动驾驶车辆的普及率。
技术实现思路
1、本发明所欲解决的技术问题在于,当行车影像异常时,如何通过调整行车影像权重值及其他感测及量测资料权重值,辅以其他感测及量测资料以进行暂时性的补强,以产生最终定位坐标值;由此免除使用高单价的光学雷达,同时避免过渡依赖行车影像所可能产生的定位判断失效或异常的问题。
2、有鉴于此,本发明开发出简便组装的设计,能够避免上述的缺点,安装方便,又具有成本低廉的优点,以兼顾使用弹性与经济性等考量。
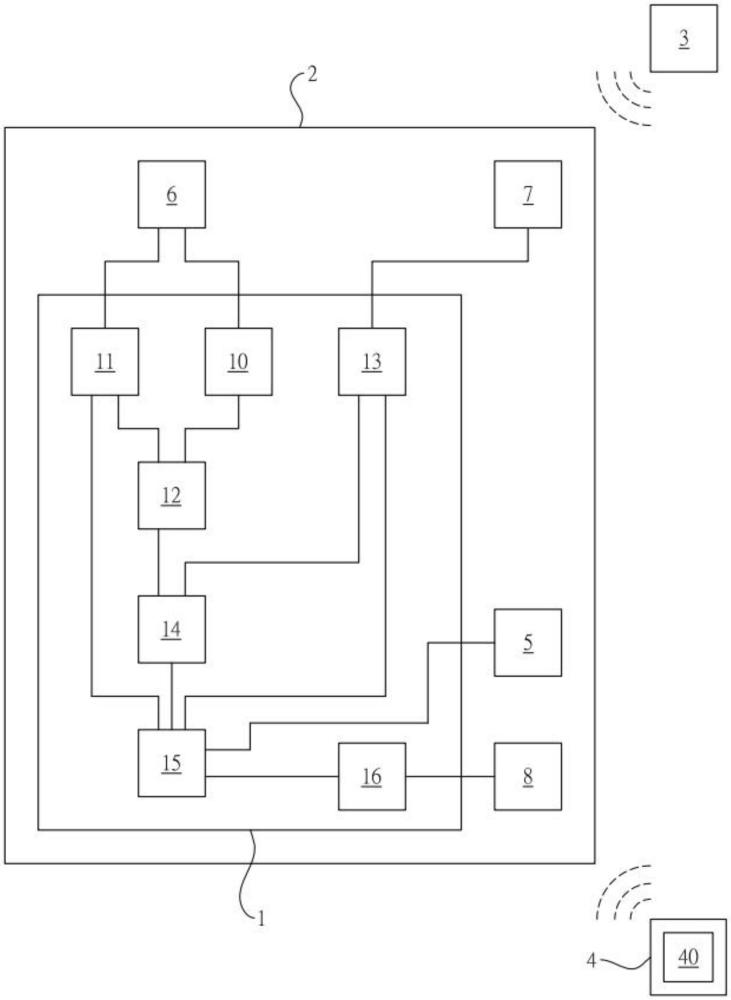
3、为解决前述问题,以达到所预期的功效,本发明提供一种基于权重调整的车辆定位系统,其设置于一车辆上。车辆定位系统包括一影像质量模块、一车道线信心度模块、一影像信心度模块、一定位信心度模块、一权重调整模块以及一定位调整模块。其中影像质量模块用于根据车辆所设置的复数个影像撷取模块所拍摄的复数个行车影像的每一者的一曝光集中度,产生一影像质量值。车道线信心度模块用于根据复数个行车影像,产生一车道线信心度。影像信心度模块用于根据影像质量值及车道线信心度,产生一影像信心度。定位信心度模块用于根据车辆所设置的一定位感测模块所接收到的复数个定位资料,产生一定位信心度。权重调整模块用于根据影像信心度及定位信心度,调整一行车影像权重值、一定位资料权重值及一惯性资料权重值。定位调整模块用于根据行车影像权重值、定位资料权重值及惯性资料权重值,调整定位系统所获得的一原始定位坐标值,产生一最终定位坐标值。
4、此外,本发明还提供一种基于权重调整的车辆定位方法,其使用设置于一车辆的一车辆定位系统执行,车辆定位方法包括以下步骤:使用车辆定位系统的一影像质量模块,根据车辆所设置的复数个影像撷取模块所拍摄的复数个行车影像的每一者的一曝光集中度,产生一影像质量值;使用车辆定位系统的一车道线信心度模块,根据复数个行车影像,产生一车道线信心度;使用车辆定位系统的一影像信心度模块,根据影像质量值及车道线信心度,产生一影像信心度;使用车辆定位系统的一定位信心度模块,根据车辆所设置的一定位感测模块所接收到的复数个定位资料,产生一定位信心度;使用车辆定位系统的一权重调整模块,根据影像信心度及定位信心度,调整一行车影像权重值、一定位资料权重值及一惯性资料权重值;以及使用车辆定位系统的一定位调整模块,根据行车影像权重值、定位资料权重值及惯性资料权重值,调整定位系统所获得的一原始定位坐标值,产生一最终定位坐标值。
5、在实施时,影像质量模块进一步根据复数个影像撷取模块所拍摄的复数个行车影像的每一者的曝光集中度及一影像清晰度产生影像质量值。
6、在实施时,影像质量模块在曝光集中度大于一第一阀值或小于一第二阀值时,调低影像质量值,并在曝光集中度小于或等于第一阀值且大于或等于第二阀值时,调高影像质量值,其中第一阀值大于第二阀值。
7、在实施时,复数个定位资料包括复数个卫星定位资料,其中复数个卫星定位资料分别相对应于复数个定位资料,定位信心度模块根据复数个卫星定位资料产生一精度衰减因子值,再依据精度衰减因子值,产生定位信心度。其中定位感测模块接收复数个定位卫星所传输的复数个卫星定位资料,复数个卫星定位资料分别相对应于复数个定位卫星,其中精度衰减因子值的大小至少相关于复数个定位卫星的一数量、复数个定位卫星相对于车辆的一分布方位及复数个定位卫星相对于车辆的一距离。
8、在实施时,权重调整模块(1)在影像信心度大于或等于一影像信心阀值时,将行车影像权重值调整为等于100%,并分别将定位资料权重值及惯性资料权重值调整为等于0、(2)在影像信心度小于一影像信心阀值且定位信心度大于或等于一定位信心阀值时,将行车影像权重值调整为小于100%,并分别将定位资料权重值及惯性资料权重值调整为大于0且小于行车影像权重值、或(3)在影像信心度小于一影像信心阀值且定位信心度小于一定位信心阀值时,将行车影像权重值调整为小于100%,并将定位资料权重值调整为等于0,且将惯性资料权重值调整为大于0且小于行车影像权重值。
9、在实施时,车道线信心度模块检测复数个行车影像的一车道线特征点集合,产生一车道线特征点分布,并根据车道线特征点分布,分析一车道连续性及一车道线特征,产生车道线信心度。
10、在实施时,定位调整模块经由以下步骤产生最终定位坐标值:使用定位调整模块,将车道线特征与一矢量地图进行匹配,产生一行车影像坐标值,其中矢量地图是储存于定位系统的一储存模块或经由车辆所设置的一无线接收模块向设置于一云端的一建图模块取得;当定位资料权重值不等于0时,使用定位调整模块,根据复数个定位资料,产生一定位资料坐标值;当惯性资料权重值不等于0时,使用定位调整模块,根据原始定位坐标值及车辆所设置的一惯性量测模块所量测的一惯性量测数据,产生一惯性资料坐标值;以及使用定位调整模块,产生最终定位坐标值,其中最终定位坐标值=((行车影像坐标值×行车影像权重值)+(定位资料坐标值×定位资料权重值)+(惯性资料坐标值×惯性资料权重值)),其中惯性资料权重值=(100%-行车影像权重值-定位资料权重值)。
11、在实施时,当定位系统从未获得过原始定位坐标值时,定位系统通过执行以下步骤初次获得原始定位坐标值:使用定位调整模块,将车道线特征与一矢量地图进行匹配,产生一行车影像坐标值,其中矢量地图是储存于定位系统的一储存模块或经由车辆所设置的一无线接收模块向设置于一云端的一建图模块取得;以及使用定位调整模块,将产生的行车影像坐标值复制到原始定位坐标值,使定位系统获得具有行车影像坐标值的原始定位坐标值。
12、在实施时,当定位系统于前次执行车辆定位方法时已经获得过原始定位坐标值,则定位调整模块将本次执行车辆定位方法时所产生的最终定位坐标值复制到原始定位坐标值。
13、在实施时,定位调整模块在一时间间隔内,影像信心度持续小于一影像信心阀值且定位信心度持续小于一定位信心阀值时,持续产生一定位失效信号,并持续产生最终定位坐标值;定位调整模块在影像信心度大于或等于影像信心阀值时或定位信心度大于或等于定位信心阀值时,停止持续产生定位失效信号。
14、在实施时,定位调整模块在一时间间隔内,影像信心度持续小于一影像信心阀值且定位信心度持续大于或等于一定位信心阀值时,产生一警示信号;定位调整模块在影像信心度大于或等于影像信心阀值时或定位信心度小于定位信心阀值时,停止产生警示信号。
15、根据本技术提供的具体实施例,本技术公开了以下技术效果:
16、当行车影像异常时,通过调整行车影像权重值、定位资料权重值及惯性资料权重值,辅以定位资料及惯性资料进行暂时性的补强,由此免除使用高单价的光学雷达,同时避免过渡依赖行车影像所可能产生的定位判断失效或异常的问题。
- 还没有人留言评论。精彩留言会获得点赞!