一种融合多源数据的河道流量监测方法及系统与流程
本发明涉及水文监测,具体涉及一种融合多源数据的河道流量监测方法及系统。
背景技术:
1、传统的河道流量监测方法主要依赖于单一的传感器数据,如流速仪、水位计等,这些数据易受环境因素影响,且监测范围有限。同时,无人机技术在河道监测中的应用日益广泛,但单独使用无人机图像数据进行流量监测也存在精度不足的问题。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种融合多源数据的河道流量监测方法及系统,通过将传感器组采集的河道流量数据、河道水位数据与无人机采集的河道图像数据进行数据融合,从而计算河道的实际流量,以解决河道流量监测精度低的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:
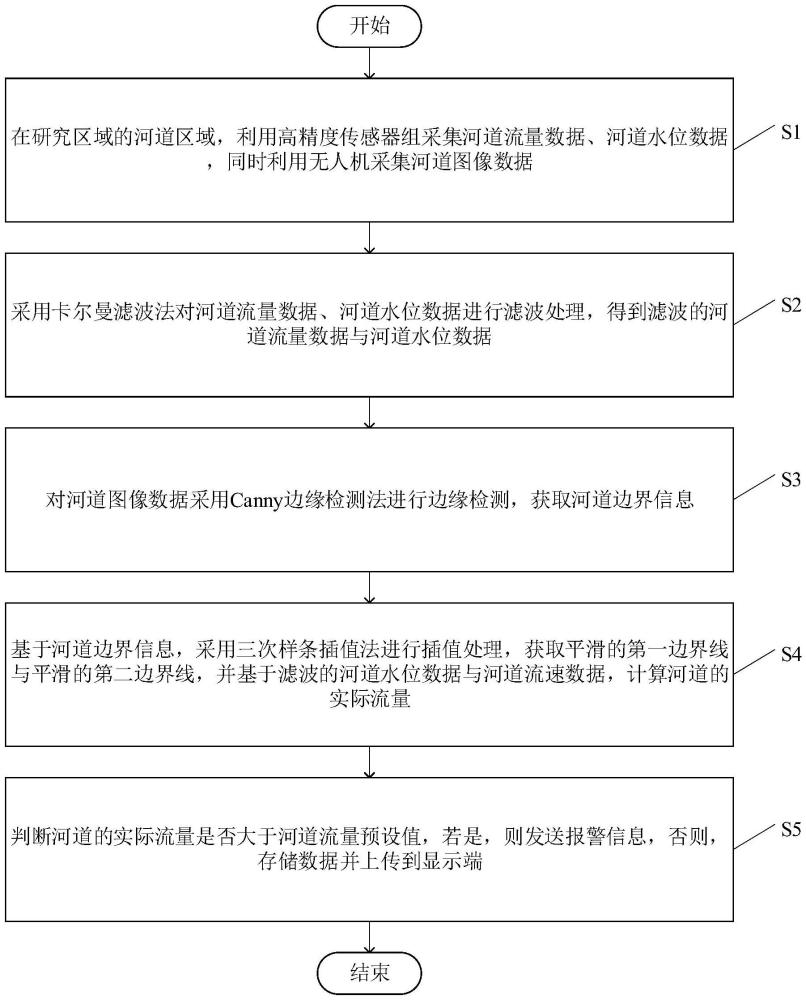
3、一种融合多源数据的河道流量监测方法,包括以下步骤:
4、s1、在研究区域的河道区域,利用高精度传感器组采集河道流量数据、河道水位数据,同时利用无人机采集河道图像数据;
5、其中,河道图像数据包括河道形状以及河道中心线;
6、s2、采用卡尔曼滤波法对河道流量数据、河道水位数据进行滤波处理,得到滤波的河道流量数据与河道水位数据;
7、s3、对河道图像数据采用canny边缘检测法进行边缘检测,获取河道边界信息;
8、s4、基于河道边界信息,采用三次样条插值法进行插值处理,获取平滑的第一边界线与平滑的第二边界线,并结合滤波的河道水位数据与河道流速数据进行数据融合,计算河道的实际流量;
9、s5、判断河道的实际流量是否大于河道流量预设值,若是,则发送报警信息,否则,存储数据并上传到显示端。
10、进一步地,步骤s1具体包括:
11、s11、在研究区域的河道区域,利用携带高清相机的无人机沿河道区域进行飞行,采集包括河道形状与河道水位线的河道图像数据;
12、s12、在研究区域的河道区域,通过布设水位传感器采集河道的水位数据,通过布设流速传感器采集河道的流速数据;
13、其中,水位传感器布设在河道中心线附近、水流平缓且不易受局部地形或障碍物影响的位置;
14、流速传感器等间距布设在河道的纵向方向上、且不易受局部地形或障碍物影响的位置。
15、进一步地,步骤s2具体包括:
16、s21、定义河道流量数据、河道水位数据的系统状态方程,即:
17、xk=axk-1+ωk-1
18、其中,xk表示第k时刻的系统状态向量,a表示状态转移矩阵,ωk-1表示第k-1时刻的过程噪声;
19、s22、基于河道流量数据、河道水位数据的系统状态方程,定义河道流速数据、河道水位数据的观测方程,即:
20、zk=hxk+μk
21、其中,zk表示第k时刻的观测向量,h表示观测矩阵,μk表示第k时刻的观测噪声;
22、s23、初始化协方差矩阵p0、系统状态向量x0、过程噪声协方差矩阵q、观测噪声协方差矩阵r;
23、s24、若当前时刻为k,预测当前时刻k的系统先验状态估计值与当前时刻k的先验协方差矩阵,即:
24、
25、其中,表第k时刻的系统先验状态估计值,表示第k-1时刻的系统状态估计值,表示第k时刻的先验协方差矩阵,pk-1表示第k-1时刻的后验协方差矩阵,t表示转置;
26、s25、基于当前时刻k的先验协方差矩阵,并计算卡尔曼增益矩阵,即:
27、
28、其中,kk表示第k时刻的卡尔曼增益矩阵;
29、s26、基于卡尔曼增益矩阵,更新当前时刻k的系统状态估计值,即:
30、
31、其中,表示第k时刻的系统状态估计值;
32、s27、基于卡尔曼增益矩阵,更新当前时刻k的后验协方差矩阵,即:
33、
34、其中,pk表示第k时刻的后验协方差矩阵,i表示单位矩阵;
35、s28、重复执行步骤s24-s27,直到处理完所有时刻的河道流量数据、河道水位数据,得到滤波的河道流速数据、河道水位数据的观测值,即滤波的河道流速数据与滤波的河道水位数据。
36、进一步地,步骤s3具体包括:
37、s31、对河道图像数据进行灰度化处理,得到灰度图像,并采用高斯滤波法对灰度图像进行滤波,得到滤波的灰度图像;
38、s32、采用sobel算子计算滤波的灰度图像在水平方向与垂直方向上的梯度值,得到每个像素点的梯度强度与方向;
39、s33、基于每个像素点的梯度强度与方向,采用非极大值抑制法对滤波的灰度图像的边缘进行细化,比较当前像素点在其梯度方向上的两个邻近像素点的梯度值,判断当前像素点的梯度值是否最大,若是,保留当前像素点为候选边缘点,否则,将当前像素点置为0,即剔除当前像素点;
40、s34、采用双阈值法检测候选边缘点,通过设定高阈值与低阈值,判断候选边缘点是否高于高阈值,若是,将其标记为强边缘点,否则,执行步骤s35;
41、s35、判断候选边缘点是否低于低阈值,若是,将其标记为非边缘点,否则,候选边缘点处于高阈值与低阈值之间,则将其标记为弱边缘点;
42、s36、检查弱边缘点的邻域像素,若弱边缘点至少被一个强边缘点包围,则将该弱边缘点作为强边缘点,并将所有强边缘点连接起来,得到河道边界信息。
43、进一步地,步骤s4具体包括:
44、s41、基于河道边界信息,获取河道的第一边界线与第二边界线;
45、s42、采用三次样条插值法对第一边界线与第二边界线进行插值处理,得到平滑的第一边界线与平滑的第二边界线;
46、s43、获取河道中心线附近的水位传感器的位置,并将水位传感器的位置作为待测点位置;
47、s44、在每个待测点位置处沿着平滑的第一边界线与平滑的第二边界线方向作垂线,获取垂线与平滑的第一边界线、平滑的第二边界线的第一交点与第二交点,将第一交点与第二交点的欧几里得距离作为待测点的实际河道宽度,即:
48、
49、其中,wi表示第i个待测点的实际河道宽度,x1、y1表示第一交点的横坐标与纵坐标,x2、y2表示第二交点的横坐标与纵坐标;
50、s45、根据滤波的河道水位数据,得到水位传感器的位置处的实际水位高度,并结合待测点的实际河道宽度,计算待测点处河道的实际横截面面积,即:
51、hi=di×wi
52、其中,hi表示第i个待测点处河道的实际横截面面积,di表示第i个待测点处水位传感器的位置的实际水位高度;
53、s46、根据滤波的河道流速数据,获取流速传感器的位置处的实际河道流速,并将距离待测点最近的流速传感器的位置处的实际河道流速作为待测点的实际河道流速;
54、s47、基于待测点的实际河道流速与待测点处河道的实际横截面面积,计算待测点处的河道流量,即:
55、qi=vi×hi
56、其中,qi表示第i个待测点处的河道流量,vi表示第i个待测点的实际河道流速;
57、s48、根据待测点处的河道流量,计算所有待测点处的河道流量的平均值,得到河道的实际流量,即:
58、
59、其中,q表示河道流量,n表示待测点数。
60、一种融合多源数据的河道流量监测系统,包括:
61、多源数据采集模块,用于在研究区域的河道区域,利用高精度传感器组采集河道流量数据、河道水位数据,同时利用无人机采集河道图像数据;
62、多源数据融合模块,用于接收河道流量数据、河道水位数据以及河道图像数据,并对河道流量数据、河道水位数据进行数据预处理,得到滤波的河道流量数据与河道水位数据,对河道水位数据进行边缘检测,获取河道边界信息,基于滤波的河道流量数据与河道水位数据、河道边界信息进行数据融合,计算河道的实际流量;
63、预警模块,用于接收河道的实际流量,若校准的河道流量大于河道流量预设值,则发送报警信息。
64、进一步地,多源数据采集模块包括无人机子系统、传感器子系统;
65、无人机子系统,用于在研究区域的河道区域,利用携带高清相机的无人机沿河道区域进行飞行,采集包括河道形状与河道水位线的河道图像数据;
66、传感器子系统,用于在研究区域的河道区域,利用水位传感器采集河道的水位数据,利用流速传感器采集河道的流速数据。
67、进一步地,多源数据融合模块包括数据预处理模块、边缘特征提取模块、数据融合模块;
68、数据预处理模块,用于接收河道的水位数据、河道的流速数据并进行滤波处理,得到滤波的河道流量数据与河道水位数据;
69、边缘特征提取模块,用于接收河道图像数据并采用canny边缘检测法进行边缘检测,获取河道边界信息;
70、数据融合模块,用于接收滤波的河道流量数据与河道水位数据、河道边界信息,并进行数据融合,得到河道的实际流量。
71、进一步地,还包括流量校正模块,用于基于河道的实际流量,利用历史监测的河道流量,采用随机森林模型对河道的实际流量进行校准,得到校准的河道流量。
72、进一步地,基于河道的实际流量,利用历史监测的河道流量,采用随机森林模型对河道的实际流量进行校准,得到校准的河道流量的具体过程为:
73、采用随机森林模型以历史监测的河道流量作为训练集对模型进行训练,并利用训练好的随机森林模型对计算的河道的实际流量进行校正,得到校正的河道流量;
74、其中,历史监测的河道流量包括若干个历史时间点的河道流量测量值。
75、本发明具有以下有益效果:
76、1.本发明所提出的一种融合多源数据的河道流量监测方法,通过将传感器组采集的河道流量数据、河道水位数据与无人机采集的河道图像数据进行多源数据融合,从而计算河道的实际流量,提高了河道流量监测的精度;
77、2.本发明所提出的一种融合多源数据的河道流量监测系统,结合高精度传感器组和无人机采集的多源数据,即河道流量数据、水位数据及图像数据,使得系统能够获取更全面、更精确的信息;传感器子系统提供精确的流速和水位数据,而无人机子系统则通过高清图像捕捉河道形状和水位线的细微变化,获取河道边界线信息,两者结合显著提高了数据精度;
78、3.同时引入预警模块与流量校正模块,提升了预警响应的及时性与准确性。
- 还没有人留言评论。精彩留言会获得点赞!