一种人工智能的电动车控制器PCB板性能测试系统的制作方法
本发明属于pcb板性能测试,涉及一种人工智能的电动车控制器pcb板性能测试系统。
背景技术:
1、电动车控制器的pcb板用于控制电动车的电机、电池管理系统以及其他功能。随着电动车技术的不断进步,对电动车控制器pcb板精准性等性能的要求也越来越高,由此凸显了对电动车控制器pcb板进行性能测试的重要性和必要性。
2、当前对电动车控制器pcb板动力性能测试主要通过模拟不同温度、湿度以及路况等情况下加速、减速和制动的精准性,从而判断电动车控制器pcb板的动力性能,很显然,还存在以下几个方面的不足:1、测试场景设置较为局限,未结合负载进行综合性测试,使得测试的覆盖面不足,进而无法提高测试结果的代表性和合理性。
3、2、当前测试立足点均为设备侧,即对电动车控制器pcb板加速、减速和制动等响应的精准性进行分析,未考虑用户侧的体验情况,即未对加速、减速以及制动等过程的平滑情况进行进一步测试评定。
4、3、动力性能评估维度较为单一,当前仅考虑动力精准性层面,未对动力测试过程中灵敏性、可靠性以及平滑性等进行综合性分析,进而导致性能测试的结果的片面性,降低测试结果的准确性和可靠性,可能导致潜在问题未能被及时发现和解决,从而影响车辆的整体性能。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,现提出一种人工智能的电动车控制器pcb板性能测试系统。
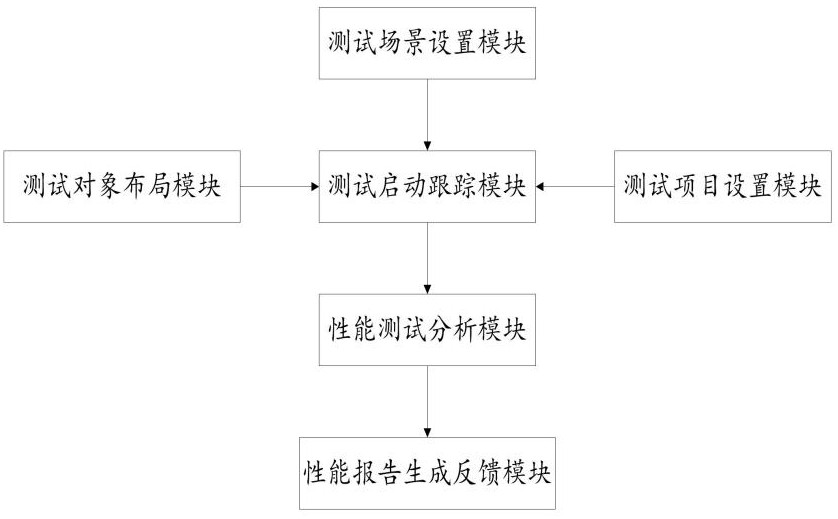
2、本发明的目的可以通过以下技术方案实现:本发明提供一种人工智能的电动车控制器pcb板性能测试系统,该系统包括:测试对象布局模块,用于将电动车控制器pcb板记为目标测试对象,并对目标测试对象进行测试线路连接。
3、测试场景设置模块,用于设置目标测试对象对应的测试场景,测试场景包括负载测试场景、路径测试场景和温度测试场景。
4、测试项目设置模块,用于将加速操作、减速操作和制动操作设置为各测试项目。
5、测试启动跟踪模块,用于将目标测试对象导入各测试场景中,进行各测试场景下各测试项目的测试,并记录各测试场景下各测试项目的测试数据。
6、性能测试分析模块,用于根据目标测试对象在各测试场景下各测试项目的测试数据,进行性能测试分析,得到性能测试分析结果。
7、s1、进行目标测试对象的速度灵敏性分析,得到目标测试对象的动力灵敏指数和制动灵敏指数,并分别记为和。
8、s2、进行目标测试对象的速度可靠性分析,得到目标测试对象的动力可靠指数和制动可靠指数,并分别记为和。
9、s3、进行目标测试对象的速度平滑性分析,得到目标测试对象的动力平滑指数和制动平滑指数,并分别记为和,进而将、、、、和作为性能测试分析结果。
10、性能报告生成反馈模块,用于根据性能测试分析结果,生成目标测试对象的性能测试分析报告,并进行反馈。
11、进一步地,所述进行目标测试对象的速度灵敏性分析,包括:从各测试场景下各测试项目的测试数据中提取负载测试场景下加速测试项目的测试数据,进而提取各施加负载下加速测试次数、各次加速测试的设置加速时长和实际记录加速时长。
12、将实际记录加速时长与设置加速时长的差值记为加速时长差,据此确认各施加负载下的有效测试比,记为,为施加负载编号,。
13、以加速测试次序为横坐标,以加速时长差为纵坐标,构建各施加负载下加速时长的变化曲线,从中进行斜率提取并作为各测试时长差变化率,记为。
14、统计负载测试场景下的加速灵敏指数,,和分别为设定第个施加负载下参照的有效测试比和时长差变化率。
15、按照的分析方式同理分析得到路径测试场景下的加速灵敏指数和温度测试场景下的加速灵敏指数,并分别记为和,据此确认目标测试对象的加速灵敏指数,记为。
16、按照目标测试对象的加速灵敏指数的分析方式同理分析得到目标测试对象的减速灵敏指数和制动平滑指数,并将目标测试对象的减速灵敏指数记为,进而统计目标测试对象的动力灵敏指数。
17、进一步地,所述确认各施加负载下的有效测试比,包括:将各施加负载下各次加速测试的加速时长差与设定许可加速时长偏差进行对比。
18、若某施加负载下某次加速测试的加速时长差小于或者等于设定许可加速时长偏差,将该施加负载下该次加速测试记为有效加速测试。
19、统计各施加负载下的有效加速测试次数,并与各施加负载下的加速测试次数进行作比,得到各施加负载下的有效测试比。
20、进一步地,所述确认目标测试对象的加速灵敏指数,包括:将负载测试场景下、路径测试场景下和温度测试场景下的加速灵敏指数分别与其设定值进行做差,统计差值大于0的测试场景数目,记为。
21、若,则将作为目标测试对象的加速灵敏指数。
22、若,则将作为目标测试对象的加速灵敏指数。
23、进一步地,所述统计目标测试对象的动力灵敏指数,具体公式如下:,和分别为设定加速灵敏指数参照权重和减速灵敏指数参照权重,,且。
24、进一步地,所述进行目标测试对象的速度可靠性分析,包括:从负载测试场景下加速测试项目的测试数据中提取各施加负载下各次加速测试的设置加速值和实际记录加速值。
25、将实际记录加速值与设置加速值进行做差,将差值记为加速偏差值,将各施加负载下对应各次加速测试的加速偏差值与设定许可加速偏差值进行对比。
26、将加速偏差值小于或者等于设定许可加速偏差值的加速测试记为吻合测试。
27、统计各施加负载下的吻合测试次数,并与各施加负载下的加速测试次数进行作比,得到各施加负载下的测试吻合比,记为。
28、统计各施加负载下的加速可靠指数,,和分别为设定参照的测试吻合比和加速灵敏指数,并确认负载测试场景下的加速可靠指数。
29、按照目标测试对象的动力灵敏指数和制动灵敏指数的分析方式同理分析得到目标测试对象的动力可靠指数和制动可靠指数。
30、进一步地,所述确认负载测试场景下的加速可靠指数,包括:将各施加负载进行两两组合,得到各施加负载组。
31、将各施加负载组中各加速负载进行做差,得到各施加负载组中的加速负载差。
32、将各施加负载组中各施加负载下的加速可靠指数进行做差,得到各施加负载组的加速可靠指数差。
33、将各施加负载组的加速负载差与设定各加速负载差的参照加速可靠指数差进行匹配对比,得到匹配的参照加速可靠指数差。
34、若某施加负载组的参照加速可靠指数差大于该施加负载组的加速可靠指数差,将该施加负载组记为吻合负载组,统计吻合负载组数目,并与施加负载组数目进行作比,将比值记为吻合负载比。
35、从各施加负载下的加速可靠指数中分别提取最大值和最小值,分别记为和,并通过均值计算得到平均加速可靠指数,记为。
36、若,将作为负载测试场景下的加速可靠指数,和分别为设定参照吻合负载比和单位补偿因子对应的修正比。
37、若,将作为负载测试场景下的加速可靠指数,为设定单位补偿因子对应的补偿比。
38、若,将作为负载测试场景下的加速可靠指数。
39、进一步地,所述进行目标测试对象的速度平滑性分析,包括:从负载测试场景下加速测试项目的测试数据中提取各施加负载下各加速时间点和各加速时间点对应的加速值。
40、以加速时间点为横坐标,以加速值为纵坐标,构建各施加负载下各次加速测试的加速曲线,进而统计各施加负载下各次加速测试的加速平滑指数,记为,为加速测试次序编号,。
41、设置各施加负载下的加速平滑评估补偿权重,进而统计负载场测试景下的加速平滑指数,,为加速测试次数,为施加负载数目。
42、按照目标测试对象的动力灵敏指数和制动灵敏指数的分析方式同理分析得到目标测试对象的动力平滑指数和制动平滑指数。
43、进一步地,所述统计各施加负载下各次加速测试的加速平滑指数,包括:从各施加负载下各次加速测试的加速曲线中提取波动点数目,记为,并提取各波动点之间的水平距离和垂直距离,进而通过均值计算得到各施加负载下各次加速测试的平均水平距离和平均垂直距离,分别记为和。
44、统计各负载测试场景下的加速平滑指数,,、和分别为设定参考的波动点数目、水平距离和垂直距离,表示自然常数。
45、进一步地,所述设置各施加负载下的加速平滑评估补偿权重,包括:以加速测试次序为横坐标,以加速平滑指数为纵坐标,构建各施加负载下的加速平滑指数曲线,并从中定位出位于平均加速测试平滑指数上方的曲线长度,记为,同时将各施加负载下的平滑曲线长度记为。
46、对各施加负载下各次测试的加速平滑指数进行方差计算,将计算结果作为各施加负载下的加速平滑差异指数,记为。
47、统计各施加负载下的加速平滑评估补偿权重,,和分别为设定参照的加速平滑差异指数和超出加速平滑曲线长度比。
48、相较于现有技术,本发明的有益效果如下:(1)本发明通过设置负载测试场景、温度测试场景和路径测试场景进行测试,有效解决了当前测试场景设置较为局限的问题,充分结合了负载等测试场景,实现了电动车控制器pcb板的多场景综合性测试,提高了测试的覆盖面,进而提高了测试结果的代表性和合理性。
49、(2)本发明通过对负载测试场景、温度测试场景和路径测试场景下的加速平滑性、减速平滑性以及制动平滑性进行进一步细致化分析,规避了当前测试立足点仅在设备侧的不足,实现了电动车控制器pcb在不同测试场景下加速、减速和制动等过程平滑情况的进一步地测试评定,进而充分考虑用户侧的体验情况,同时还扩充了电动车控制器pcb性能测试的评估指标,进而提高了后续用户的驾驶体验感。
50、(3)本发明通过设置负载测试场景、温度测试场景和路径测试场景,并从灵敏性、可靠性以及平滑性三个维度分别进行加速、减速和制动操作的性能测试分析和反馈,实现了动力性能的多维度评估,打破了当前仅考虑动力精准性层面的不足,保障了性能测试结果的全面性,提升了测试结果的准确性和可靠性,在另一方面还能够使得电动车控制器pcb潜在动力问题潜能被及时发现和解决,并且还能够降低对车辆整体性能影响。
- 还没有人留言评论。精彩留言会获得点赞!