一种基于5G的无人矿卡视觉识别与路径规划系统的制作方法
本发明涉及通信,具体涉及一种基于5g的无人矿卡视觉识别与路径规划系统。
背景技术:
1、在现代矿山作业中,无人驾驶矿卡技术逐渐得到了广泛应用,其依托先进的图像处理算法和路径规划技术,实现了矿卡在复杂环境下的自动化控制与管理,其中,5g通信技术凭借其高速率、低延迟和大规模连接的优势,为无人矿卡的远程控制和实时数据传输提供了重要的技术支持,通过5g网络,无人矿卡能够实时采集并分析矿山环境中的大量数据,制定最优行车路径,有效提高了作业效率,并大幅度减少了人工驾驶的安全隐患。
2、然而,在矿山这种特殊的复杂环境中,无人驾驶技术的应用仍然面临一定的挑战。矿山作业场所通常地形复杂,存在大量的岩石、建筑物及树木等障碍物。这些障碍物会导致5g信号的遮挡,进而影响无人矿卡与中央控制系统之间的数据传输和通信同步性。当信号传输受阻时,会产生信息延迟或传输错误,导致无人矿卡无法及时接收或发送指令,严重影响车辆的路径规划和决策过程。这种信息同步误差问题,特别是在关键决策时刻,导致无人矿卡作出错误反应,进而降低整个系统的稳定性和作业可靠性。因此,如何在复杂地形下确保5g信号的稳定传输,以及提升无人驾驶系统的协调性和实时性,是当前无人矿卡技术亟待解决的技术难题。
技术实现思路
1、本发明的目的在于提供一种基于5g的无人矿卡视觉识别与路径规划系统,解决现有技术由于矿山作业场所通常地形复杂,障碍物会导致5g信号的遮挡,进而影响无人矿卡与中央控制系统之间的数据传输和通信同步性,当信号传输受阻时,会产生信息延迟或传输错误,导致无人矿卡无法及时接收或发送指令,严重影响车辆的路径规划和决策过程,信息同步误差问题,特别是在关键决策时刻,导致无人矿卡作出错误反应,进而降低整个系统的稳定性和作业可靠性的问题。
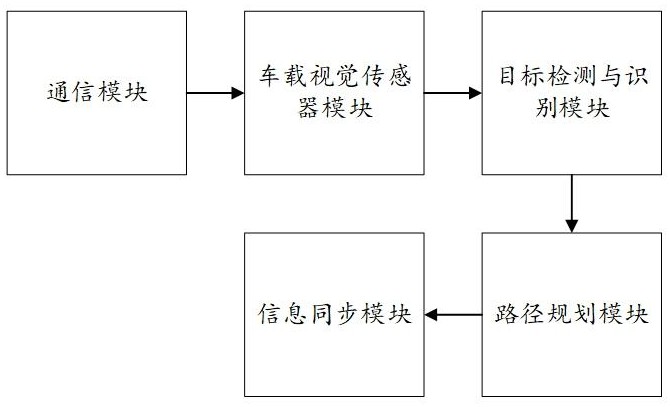
2、为实现上述目的,本发明提供如下技术方案:一种基于5g的无人矿卡视觉识别与路径规划系统,所述系统包括:
3、通信模块,用于基于5g网络的高带宽低延时特性实现实时数据传输;
4、车载视觉传感器模块,用于获取周围环境的实时信息;
5、目标检测与识别模块,用于基于车载视觉传感器模块获取的环境信息进行目标的检测与识别;
6、路径规划模块,用于利用实时更新的地图数据进行无人矿卡的路径规划;
7、信息同步模块,用于基于5g网络的通信特性消除信息同步误差,确保无人矿卡的准确操作与导航;
8、其中,所述目标检测与识别模块基于车载视觉传感器模块获取的环境信息进行目标的检测与识别包括:通过卷积神经网络与yolo算法进行实时定位,具体公式为:
9、×,
10、其中,表示特征映射,表示卷积核,表示输入的图像;
11、根据与周围目标的距离和目标重要性的权重计算路径规划中的代价函数,具体为:
12、,
13、其中,表示路径规划的代价函数,表示当前目标的位移代价,表示涉及到的目标数量,表示目标操作的精度权重,表示目标的重要性权重,表示与周围目标的距离,表示周围目标在横坐标上的位置,表示周围目标在纵坐标上的位置;
14、所述路径规划模块利用实时更新的地图数据进行无人矿卡的路径规划包括:通过前往各个目标时间,最小化总时间,结合动态信息来计算路径规划的目标函数,具体为:
15、,
16、其中,表示路径规划的目标函数,表示涉及到的目标数量,表示到第个目标的时间,表示第个目标到下一个目标的时间;
17、根据对周围目标的环境信息对路径的影响进行到目标的时间上的实时调整,具体为:
18、,
19、其中,表示两个目标在特定时间时的实际经过的时间,表示时间,表示在理想情况下的基础到达目标的时间,表示因环境因素导致的延迟时间。
20、优选的,所述通信模块基于5g网络的高带宽低延时特性实现实时数据传输包括:
21、实时获取矿山地理环境变化造成的信号遮挡区域;
22、根据遮挡区域大小调整5g基站功率,确保关键区域通讯无遮挡;
23、基于车辆位置和速度参数制定多跳通信链路备份策略;
24、在检测到通信链路上某一点信号强度下降超过设定阈值h时启动动态数据切换流程,其中h表示设定的信号强度阈值,当信号强度降至a以下时表明信号被严重遮挡。
25、优选的,所述制定多跳通信链路备份策略包括:
26、监听各车辆周围的5g信号强度及其变化;
27、计算每辆车周围所有可通讯节点构成的通信范围;
28、基于通信范围内信号最佳的相邻节点形成备份路由;
29、判断车辆是否进入预定义的关键遮挡区域r内,如果进入了区域r则触发链路自动切换到最佳备用路由以保证连续的数据传送,其中区域r代表易出现通信问题的固定位置。
30、优选的,所述车载视觉传感器模块获取周围环境的实时信息包括通过包括摄像头、激光雷达获取矿卡周围的图像和深度信息。
31、优选的,所述通信模块基于5g网络的高带宽低延时特性实现实时数据传输还包括:
32、收集车载多传感器产生的大数据量信息i;
33、评估传输时延迟t5以保证关键指令能够在预定时间之前送达目的地端;
34、计算出的信息吞吐速率e与设定下限阈值f比较e≥f,若不符合要求自动增加带宽数量;
35、采用分段传输技术分割过大信息流m分成独立单元,再依次基于各个子包判断是否达到重新传输条件(|ei|≤t6),其中,ei为第i个小数据包的能量强度,若强度小于阈值t6将启动自动补发机制。
36、优选的,所述车载视觉传感器模块获取周围环境的实时信息还包括:
37、集成多个摄像头形成的三维空间模型z,并根据此建立全方位视野覆盖u;
38、获取传感器采集得到的目标物体尺寸s与位置矢量l;
39、若单个物体遮挡比率达到设定条件公式面积占比:h/t4,其中,h是遮挡面积大小,t4指的是设定标准占比比率时,激活特殊导航模式;
40、以上述获得的空间结构参数为基础,动态预测车辆运动边界b。
41、优选的,所述目标检测与识别模块基于车载视觉传感器模块获取的环境信息进行目标的检测与识别还包括:
42、获取由摄像头捕获的矿山场景图像帧x并转化为灰度图像y;
43、应用神经网络对灰度图像y中的类别t进行标注;
44、若物体运动向量m的绝对值|m|超过特定阈值阈限t3,则触发告警,指示车辆减速直至停下;
45、基于当前检测出的所有目标之间的距离关系式|o1o2|<d,此处o1和o2分别代表第一个和第二个最近邻检测到的动态目标的距离测量值d,一旦满足该公式,则执行规避动作。
46、优选的,所述路径规划模块利用实时更新的地图数据进行无人矿卡的路径规划还包括:
47、基于最新接收的矿山环境变化信息l进行路径重规划以避开动态障碍物体q;
48、计算不同路径点之间的时间成本s;
49、设置避障安全范围r,在预测路径点间的距离p小于安全范围r时避开;
50、基于车辆速度v估算完成任务所需总体行驶时间g,确保不超过规定的时间窗口t2。
51、优选的,所述信息同步模块基于5g网络的通信特性消除信息同步误差包括:
52、利用车载天线阵列动态调整发射角度a;
53、实施多路信号同步算法增强稳定性b;
54、监测信号传输状态以实时反馈信号强度c;
55、基于当前车辆位置信息d调整通信节点。
56、由上述技术方案可知,本发明具有如下有益效果:
57、该基于5g的无人矿卡视觉识别与路径规划系统,通过通信模块基于5g网络的高带宽低延时特性实现实时数据传输,车载视觉传感器模块获取周围环境的实时信息,目标检测与识别模块基于车载视觉传感器模块获取的环境信息进行目标的检测与识别,路径规划模块利用实时更新的地图数据进行无人矿卡的路径规划,信息同步模块基于5g网络的通信特性消除信息同步误差,确保无人矿卡的准确操作与导航,确保在矿山复杂环境中实现更加稳定的通信传输,提高整个系统的实时性与协调性,确保无人矿卡能够在恶劣环境下安全、精准地完成任务,避免碰撞风险,提高矿区作业效率,提升了无人矿卡在复杂环境下的自主决策能力,该系统在信号不稳定或部分丢失的情况下,能够及时作出合理反应,避免因信息延迟或传输错误导致的误操作,进一步提升了无人矿卡的稳定性和作业安全性,无人矿卡能够在不依赖人工干预的情况下高效作业,极大减少了矿区人工驾驶的风险和人力成本,解决了现有技术由于矿山作业场所通常地形复杂,障碍物会导致5g信号的遮挡,进而影响无人矿卡与中央控制系统之间的数据传输和通信同步性,当信号传输受阻时,会产生信息延迟或传输错误,导致无人矿卡无法及时接收或发送指令,严重影响车辆的路径规划和决策过程,信息同步误差问题,特别是在关键决策时刻,导致无人矿卡作出错误反应,进而降低整个系统的稳定性和作业可靠性的问题。
- 还没有人留言评论。精彩留言会获得点赞!