一种站台限界测量误差评定方法与流程
本发明涉及车站站台限界测量的,尤其涉及一种站台限界测量误差评定方法。
背景技术:
1、在铁路运输过程中,站台限界主要是指铁轨与站台之间的固定距离,车站站台边缘与车站轨道的中心线之间有一定的距离,才能防止火车在直线或曲线上运行时与站台发生接触,以保证火车安全通行避。为了确保列车进站时行驶安全,限界检测每季度不少于一次,而遇发生影响限界变化时(如施工、站台变形和沉降等),应随时测量,发现侵限,及时处理,从而确保列车行驶安全。
2、目前,铁路房建部门多采用手持工具对站台限界进行各参数测量,但测量效率低,只能在个别断面进行定点测量,而且容易受人为因素造成测量误差。而现有技术中也存在运用测量小车对站台限界的各参数进行静态测量,但由于受环境温度变化等原因,传感器的读数也容易存在误差,如何评判站台限界尺寸的相关参数测量是否准确,现有技术缺乏对应的方法进行评定。
技术实现思路
1、针对以上不足,本发明提出了一种站台限界测量误差评定方法,能够对站台测量限界尺寸的相关参数进行评定,从而保证测量的准确性和可靠性。
2、为达到上述目的,本发明采用如下技术方案:
3、一种站台限界测量误差评定方法,包括:
4、步骤1:利用测量小车测量站台的限界尺寸的各参数值;
5、步骤2:将所述步骤1所得的参数值代入对应的限界尺寸公式,并计算对应限界尺寸的数值;
6、步骤3:移动所述测量小车,在给定的行进单位步长进行多次重复测量,并记录数据;
7、步骤4:建立测量模型,对测量模型的各个分量进行不确定度的计算,计算总合成标准不确定度uci,并计算扩展不确定度u,
8、u=uci×k,其中,k为包含因子,i为各尺寸序号;
9、步骤5:将所述步骤4计算的u的数值与对应的限界尺寸的最大允许误差区间的半宽值进行比较,若u计算的数值小于所述半宽值,则可以判断测量的限界尺寸参数合格。
10、根据本发明实施例的站台限界测量误差评定方法,至少具有如下有益效果:通过测量各限界尺寸的参数值,然后通过建立对应的限界尺寸的测量模型,并对各个限界尺寸的不确定度的分量进行计算,最终计算出对应的限界尺寸的扩展不确定度,通过比较扩展不确定度与限界尺寸的最大允许误差区间的半宽值,有利于评估对应的测量数值是否合格,从而保证限界尺寸测量的准确性和可靠性,有利于形成站台的限界尺寸测量的规范化评定流程。
11、进一步地,所述测量小车包括走行轮和横梁,所述走行轮用于与轨道滚动接触,所述横梁的两端分别设有位移传感器和测量轮,所述测量轮与轨道的内壁相接触,所述位移传感器用于获取所述横梁的端点与接触点之间的距离l1;
12、所述步骤2中的限界尺寸公式计算轨道的轨距l1,
13、l1=l3+2×l1,其中,l3为横梁的长度;
14、所述步骤3中的uci包括计算轨距的合成标准不确定度uc1,
15、
16、其中,c1至c7为灵敏度系数,u11为轨距测量的重复性或测量分辨力引入的不确定度,u12为所述位移传感器的测量示值误差引入的不确定度,u13为接触点与所述走行轮的最低母线的有效高度偏差引入的不确定度,u14为所述走行轮的平面度引入的不确定度,u15为所述测量轮的磨损引入的不确定度,u16为所述测量轮的工作面对自身轴线的跳动量引入的不确定度,u17为轨道的轨枕与所述测量小车的测量结构件间的膨胀系数差引入的不确定度。
17、进一步地,基于a类分析计算轨距测量的重复性引入的不确定度ua、基于b类分析计算轨距测量分辨力引入的不确定度ub,则u11=max[ua,ub];
18、计算ua的步骤包括:通过测量n组实验数据记录所得的数据值li,并计算数据的平均值将所述平均值通过贝塞尔公式计算得到实验标准偏差si(l),ua=si(l),如下式:
19、
20、计算ub的步骤包括:其中,a为测量计算精度的允许误差的半宽值,k为包含因子。
21、进一步地,基于b类分析计算u12至u17,如下式:
22、其中,i为各不确定度的序号,ai为对应序号测量计算精度的允许误差的半宽值,k为包含因子。
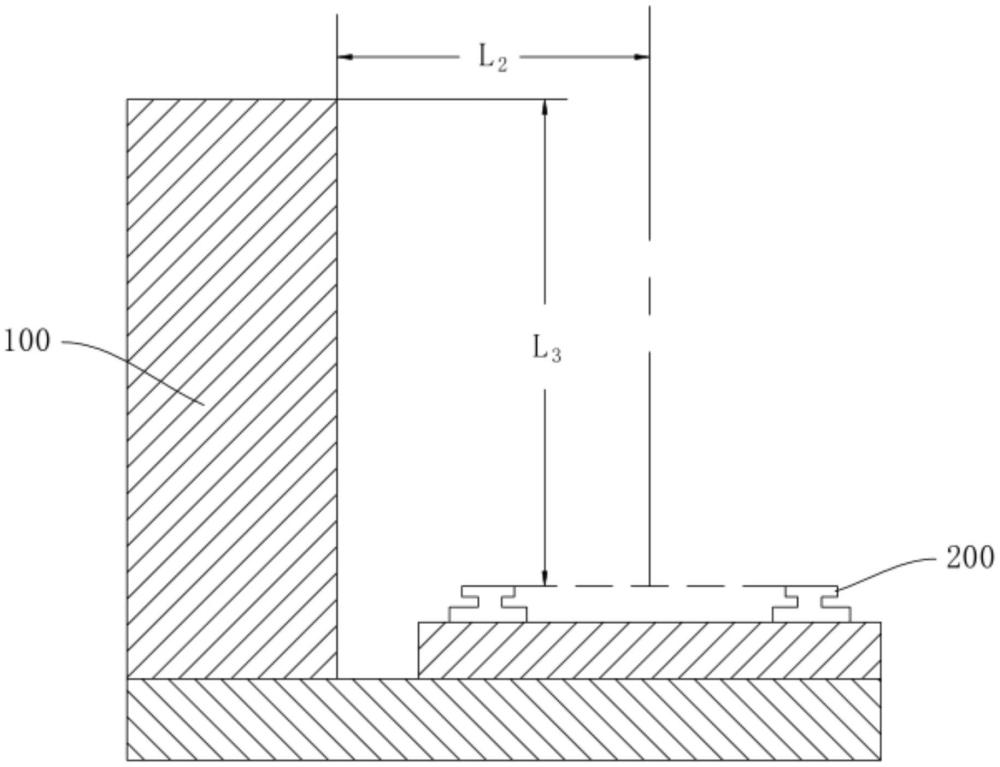
23、进一步地,所述测量小车还包括垂直杆,所述垂直杆上间隔设置有两个激光测距模块,所激光测距模块与所述测量轮位于同一竖直面,所述激光测距模块用于测量激光起点至所述站台的间距l4;
24、所述步骤2中限界尺寸公式还包括计算限界横向尺寸l2,
25、式中,l5为激光起点与所述测量轮与轨道的接触点的距离;
26、所述步骤3中的uci还包括计算限界横向尺寸的合成标准不确定度uc3,
27、
28、其中,c1至c5为灵敏度系数,u31为限界横向尺寸测量的重复性或测量分辨力引入的不确定度,u32为所述激光测距模块的测量示值误差引入的不确定度,u33为所述激光测距模块与所述垂直杆的垂直度引入的不确定度,u34为轨距测量引入的不确定度,u35为垂直杆的垂直度引入的不确定度。
29、进一步地,所述测量小车还包括倾角传感器,所述倾角传感器用于获取实际轨道的顶面与水平面的夹角α;
30、所述步骤2的限界尺寸公式包括轨道的超高理论计算值h,
31、h=1505×sin(α);
32、所述步骤3中的uci包括计算轨道的超高的合成标准不确定度uc2,
33、
34、其中,c1至c4为灵敏度系数,u21为超高测量的重复性和测量分辨力引入的不确定度中的最大值,u22为所述倾角传感器的测量示值误差引入的不确定度,u23为所述走行轮的平面度引入的不确定度,u24为轨道的轨枕与所述测量小车轨的超高测量结构件间膨胀系数差引入的标准不确定度。
35、进一步地,所述测量小车还包括垂直杆,所述垂直杆上可移动地间隔设置有两个激光测距模块,所述激光测距模块与所述测量轮位于同一竖直面,所述激光测距模块用于测量激光起点至所述站台的间距l4,在所述步骤1中所述激光模块每单位移动步长对站台边缘进行一次测距,记录相关数据,并根据数据判断激光是否刚好打在站台的顶面;
36、所述步骤2中限界尺寸公式还包括计算限界垂向尺寸l3,
37、l3=l6+l7,其中,l6为所述激光模块移动的行程,l7为激光起到至轨道的轨面的垂直高度。
38、进一步地,若轨道的轨面水平或者内轨出现超高的情况下,所述激光测距模块的读数为0mm或者大于2000mm时,则判断激光刚好打在站台的顶面上;
39、若在轨道的外轨出现超高的情况下,引入判断激光点是否刚好打在站台顶面的计算值t,t的数值大于阈值10时,则判断激光刚好打点在站台的顶面上,如下式:
40、其中,β2为当前所述激光测距模块的读数,β1为上一次所述激光测距模块的读数,α为所述激光测距模块的单位移动步长。
41、进一步地,所述激光测距模块连接有用于驱使其沿竖直方向移动的滑台模组,所述滑台模组包括驱动马达;
42、所述步骤3中的uci还包括计算限界垂向尺寸不确定度uc4,
43、
44、其中,c1至c5为灵敏度系数,u41为站台限界垂向尺寸测量的重复性和/或测量分辨力引入的不确定度,u42为驱动马达示值误差引入的不确定度,u43为所述激光测距模块与所述垂直杆的垂直度引入的不确定度,u44为所述垂直杆的垂直度引入的不确定度,u44为站台与所述垂直杆的膨胀系数差引入的不确定度。
45、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!