车辆行驶引导线生成方法、装置、设备和存储介质与流程
本技术涉及智能驾驶,特别是涉及一种车辆行驶引导线生成方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
背景技术:
1、高速领航辅助(noa,navigate of assist)是高阶智驾的标志性功能,其能够自主完成超车、避让、上下匝道等功能,早期的noa主要基于高精度地图及高精度定位的配合使用来实现辅助驾驶,但因高精度地图更新周期慢,以及高精度地图以及高精度定位所带来的资源消耗较高,使用高精度地图的方案逐渐被轻量化地图方案替代。
2、而轻量化地图方案在辅助驾驶过程中,面对复杂道路场景时,无法及时给出准确且稳定的车辆行驶引导线。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够准确、稳定给出车辆行驶引导线的车辆行驶引导线生成方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种车辆行驶引导线生成方法,包括:
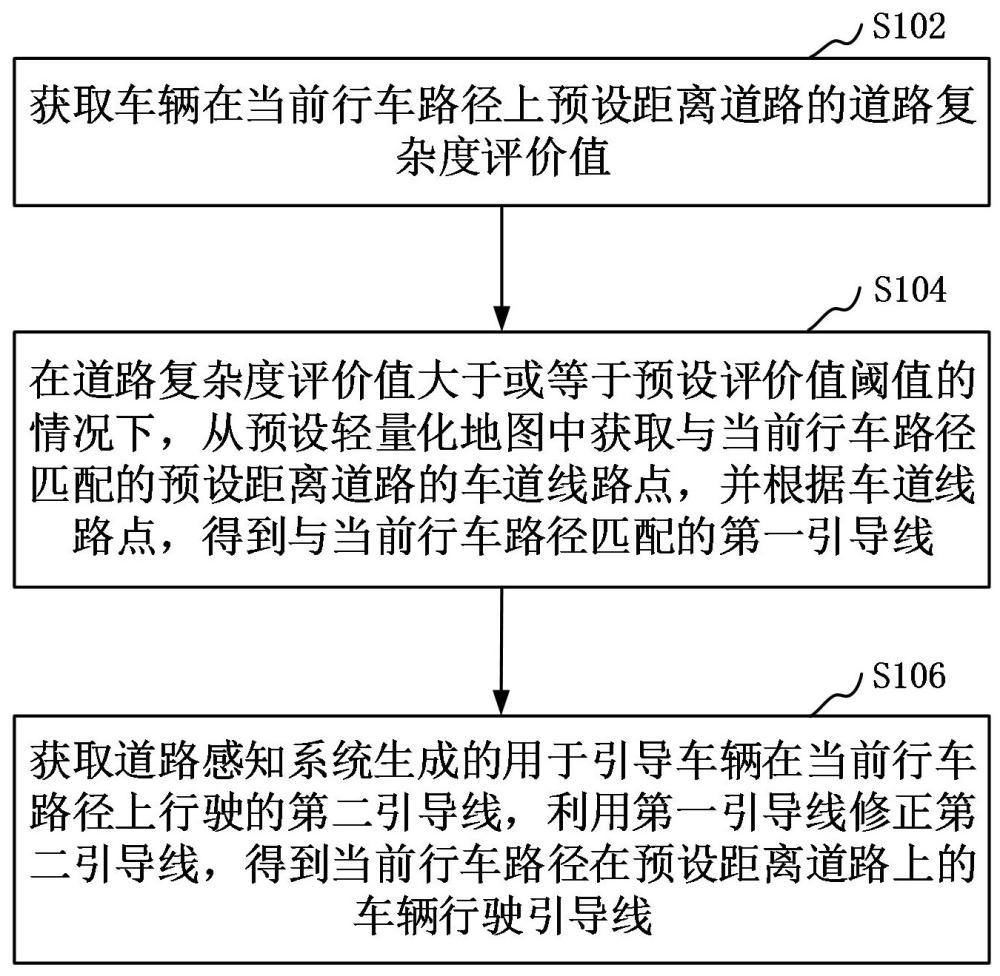
3、获取车辆在当前行车路径上预设距离道路的道路复杂度评价值;所述道路复杂度评价值用于表征道路的复杂程度;
4、在所述道路复杂度评价值大于或等于预设评价值阈值的情况下,从预设轻量化地图中获取与所述当前行车路径匹配的预设距离道路的车道线路点,并根据所述车道线路点,得到与所述当前行车路径匹配的第一引导线;
5、获取道路感知系统生成的用于引导车辆在当前行车路径上行驶的第二引导线,利用所述第一引导线修正所述第二引导线,得到所述当前行车路径在预设距离道路上的车辆行驶引导线。
6、在其中一个实施例中,所述获取车辆在当前行车路径上预设距离道路的道路复杂度评价值,包括:
7、获取所述车辆的当前定位信息,基于所述当前定位信息在所述预设导航地图中确定当前定位位置,从所述预设导航地图中查询基于所述当前定位位置开始的预设距离道路的道路结构信息,以及从道路感知系统实时获取车道线清晰度评估结果;
8、根据所述道路结构信息以及所述车道线清晰度评估结果,得到所述预设距离道路的道路复杂度评价值。
9、在其中一个实施例中,所述道路结构信息包括车道平均半径、道路坡度、匝道分道间隔以及车道数量变化信息;所述车道线清晰度评估结果包括车道线能见度;所述车道线能见度基于所述道路感知系统获取的道路图像中被识别为车道线区域的像素以及预设像素亮度阈值得到;
10、所述根据所述道路结构信息以及所述车道线清晰度评估结果,得到所述预设距离道路的道路复杂度评价值,包括:
11、根据所述车道平均半径、所述道路坡度以及所述车道线能见度,得到弯道评价值;
12、根据所述匝道分道间隔,以及预设间隔上限阈值与预设间隔下限阈值,得到匝道评价值;
13、根据所述车道数量变化信息,以及预设数量变化阈值,得到车道数量变化评价值;
14、根据所述弯道评价值、所述匝道评价值以及所述车道数量变化评价值,得到所述预设距离道路的道路复杂度评价值。
15、在其中一个实施例中,所述根据所述车道平均半径、所述道路坡度以及所述车道线能见度,得到弯道评价值,包括:
16、根据所述车道平均半径,以及预设半径上限阈值与预设半径下限阈值,得到车道半径评价值;
17、根据所述道路坡度,以及预设坡度上限阈值与预设坡度下限阈值,得到道路坡度评价值;
18、根据所述车道线能见度,以及预设能见度上限阈值与预设能见度下限阈值,得到车道线能见度评价值;
19、根据所述车道半径评价值、所述道路坡度评价值以及所述车道线能见度评价值,得到弯道评价值。
20、在其中一个实施例中,所述当前行车路径基于预设导航地图得到;
21、所述从预设轻量化地图中获取与所述当前行车路径匹配的车道线路点,并根据所述车道线路点,得到与所述当前行车路径匹配的第一引导线,包括:
22、获取所述预设轻量化地图中与所述当前行车路径对应的车道线路点集合,并从所述车道线路点集合中获取对应于各车道的车道线路点,根据所述各车道的车道线路点,得到所述各车道的车道中心点;
23、利用所述各车道的车道中心点进行曲线拟合,得到所述各车道的第一引导线;
24、将与所述当前行车路径对应的车道的第一引导线,作为所述当前行车路径匹配的第一引导线。
25、在其中一个实施例中,所述获取所述预设轻量化地图中与所述当前行车路径对应的车道线路点集合,包括:
26、从所述预设导航地图中获取当前行车路径在预设距离道路的路径起点坐标、路径终点坐标以及目标路径点坐标;所述目标路径点坐标为所述当前行车路径中除路径起点以及路径终点之外的,其他任意一个路径点的坐标;
27、根据所述路径起点坐标以及所述路径终点坐标,在所述预设轻量化地图中生成候选路点区域;
28、根据所述目标路径点坐标,从所述预设轻量化地图中的候选路点区域的各路径点位中获取与目标路径点距离最小的目标路径点位;所述各路径点位基于各车道的车道线路点得到;
29、根据各所述目标路径点位对应的各车道的车道线路点,得到所述预设轻量化地图中与所述当前行车路径对应的车道线路点集合。
30、在其中一个实施例中,所述获取道路感知系统生成的用于引导车辆在当前行车路径上行驶的第二引导线,包括:
31、获取道路感知系统生成的对应于当前行驶方向上多个车道的候选引导线,获取各所述候选引导线与所述第一引导线的相似度,将相似度最高的候选引导线作为用于引导车辆在当前行车路径上行驶的第二引导线。
32、在其中一个实施例中,所述利用所述第一引导线修正所述第二引导线,得到所述当前行车路径在预设距离道路上的车辆行驶引导线,包括:
33、获取所述第一引导线以及所述第二引导线的多个插值点,根据多个所述插值点确定多个几何中心点;
34、根据多个所述几何中心点进行拟合,得到所述当前行车路径在预设距离道路上的车辆行驶引导线。
35、在其中一个实施例中,所述获取道路感知系统生成的对应于当前行驶方向上多个车道的候选引导线,包括:
36、利用所述道路感知系统采集当前行驶方向上的多个道路图像;
37、根据多个所述道路图像,得到俯瞰视角的多车道全景图像;
38、将所述多车道全景图像输入预先训练好的车道中心线生成模型,得到当前行驶方向上多个车道的车道中心线,将多个所述车道中心线作为当前行驶方向上多个车道的候选引导线。
39、在其中一个实施例中,所述根据多个所述道路图像,得到俯瞰视角的多车道全景图像,包括:
40、将多个所述道路图像进行特征点匹配,基于匹配到的特征点将多个所述道路图像进行拼接,得到透视视角的多车道全景图像;
41、将所述透视视角的多车道全景图像进行透视变换,得到俯瞰视角的多车道全景图像。
42、第二方面,本技术还提供了一种车辆行驶引导线生成装置,包括:
43、道路复杂度评价值获取模块,用于获取车辆在当前行车路径上预设距离道路的道路复杂度评价值;所述道路复杂度评价值用于表征道路的复杂程度;
44、第一引导线获取模块,用于在所述道路复杂度评价值大于或等于预设评价值阈值的情况下,从预设轻量化地图中获取与所述当前行车路径匹配的预设距离道路的车道线路点,并根据所述车道线路点,得到与所述当前行车路径匹配的第一引导线;
45、车辆行驶引导线生成模块,用于获取道路感知系统生成的用于引导车辆在当前行车路径上行驶的第二引导线,利用所述第一引导线修正所述第二引导线,得到所述当前行车路径在预设距离道路上的车辆行驶引导线。
46、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面中所述的方法的步骤。
47、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中所述的方法的步骤。
48、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面中所述的方法的步骤。
49、上述车辆行驶引导线生成方法、装置、计算机设备、计算机可读存储介质和计算机程序产品,首先获取车辆在当前行车路径上预设距离道路的道路复杂度评价值,在道路复杂度评价值大于或等于预设评价值阈值的情况下,从预设轻量化地图中获取与当前行车路径匹配的预设距离道路的车道线路点,并根据上述车道线路点,得到与当前行车路径匹配的第一引导线;获取道路感知系统生成的用于引导车辆在当前行车路径上行驶的第二引导线,利用第一引导线修正第二引导线,得到当前行车路径在预设距离道路上的车辆行驶引导线。本实施例中,通过获取动态的道路复杂度评价值,在判定为复杂道路的情况下,通过静态的轻量化地图数据得到与当前行车路径匹配的第一引导线,通过动态的道路感知系统获取用于引导车辆在当前行车路径上行驶的第二引导线,再综合静态地图数据得到的第一引导线去修正动态数据得到的第二引导线进而得到车辆行驶引导线,可以提高车辆在复杂道路上生成车辆行驶引导线的精准度,进而降低行车风险;另外,通过评估道路复杂度来决定是否生成第一引导线,在道路复杂度评价值小于或等于预设评价值阈值的情况下,智能驾驶系统无需生成第一引导线,可以节约数据处理和传输的资源,降低智能驾驶系统的运行资源损耗。
- 还没有人留言评论。精彩留言会获得点赞!