一种基于声信标的水下多站测速技术的制作方法
本发明属于水下目标导航定位领域,具体涉及一种基于声信标的水下多站测速技术,是一种利用声信标和多测站搭载接收设备实现不依赖航行体本身条件下的水下运动速度测量技术。
背景技术:
1、受研发成本、作业条件、海洋环境等因素影响,航行体水下测试中运动数据难于获取。目前主要采用在航行体内部加装惯性传感器的方式获得加速度、角速率等参数,进而经数据处理得到速度、位置、姿态等信息。这种方式获取数据相对成熟、可靠,但也存在固有缺陷,惯性器件的漂移误差随时间累积,在长时间航行过程中定位误差较大。另一种内测方式即在航行体上加装多普勒计程仪,利用发射声波和接收海底反射声波之间的多普勒频移测量船舶相对于水底的航速和累计航程,其技术也较为成熟。上述2种方式都依赖于航行体本身,数据在航行体上完成记录和处理,适用于事后分析,当航行体因故障无法正常出水回收时,难以获知其水下运动过程及状态信息。
2、相比之下,水声定位技术是一种不依赖航行的外部观测技术,目前已发展了超短基线、短基线、长基线等多种定位模式,在加装声信标条件下可以获得稳健的定位性能并达到较高的定位精度。然而,水声定位技术与实际运用的工况条件和环境条件息息相关,任何一个水声定位系统都有其适用范围及条件,对于机动性强、动态程度高的局部水下航行,为准确测量和识别其运动特性,需结合具体工况采用有针对性技术设计。特别是对于速度参数的测量,若采用常规的位置差分方式计算,得到的序列值将出现较大的随机波动,难以满足航行体运动性能分析的要求。
3、近年来,随着水声技术的进步,声信标性能不断提升,已发展了高帧率定位声信号提供、径向速度稳健估计、高精度水下测站校准等技术,为解决外测条件下的航行体水下高精度测速问题提供了技术基础。为解决航行体水下性能评估的高可靠性测速问题,迫切需要发展基于声信标的水下运动参数外测技术。
技术实现思路
1、为解决上述问题,本发明提出了一种利用声信标和多测站搭载接收设备实现不依赖航行体本身条件下的水下运动速度测量技术,利用基于声信标的声学定位系统提供斜距、径向速度信息,结合测站位置完成位置、速度解算,再利用多项式约束方法实现全序列的优化估计。该技术具有观测过程不依赖航行体、测量精度高、结果可准实时获取且数据平滑、连续等特点,能够适应机动性强、动态程度高的局部复杂水下航行过程,对于航行体水下运动性能分析评估具有实用价值。
2、本发明的技术方案是:
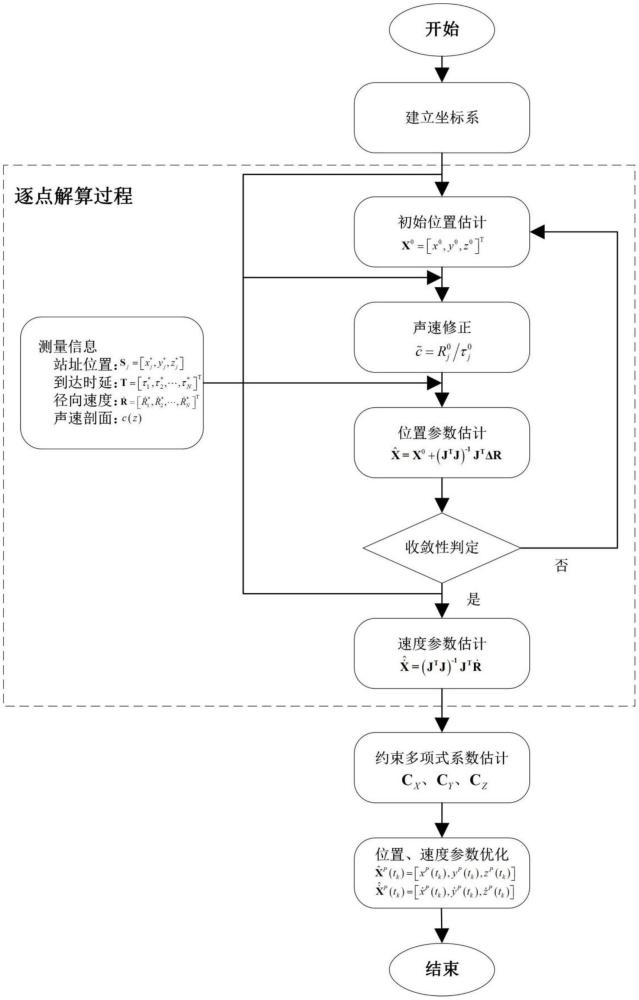
3、一种基于声信标的水下多站测速技术,首先,建立统一的坐标系,配准测站位置、声速剖面等信息,得到到达时延和径向速度估计值,并对航行体初始位置进行估计;其次,通过声速修正与位置参数估计的迭代运算,得到航行体位置、速度参数的逐点解算结果;最后,选取合理的多项式约束函数,利用位置、速度参数的逐点解算结果对函数系数进行辨识,基于多项式表达式得到优化的航行体的位置、速度参数序列。
4、具体步骤如下:
5、步骤一:建立初始测量信息
6、(1.1)建立坐标系
7、建立测站坐标系,在测量区域内选取理论位置点,将其高程零点设为原点o,ox轴指向东,oy轴指向北,oz轴铅直向上。设待测航行体目标位置为x=[x,y,z],速度为测量信息与参数估计结果均匹配到这一坐标框架下。
8、(1.2)获取测量信息
9、在多测站海上部署条件下,通过卫星导航定位、惯性传感器、水声定位等技术手段,获取各测站位置信息,测站j的坐标为n为测站数(n≥3)。
10、通过现场测量获取声速剖面c(z),具体信息包括随深度分层变化的声速值以及观测位置。
11、在有声信标条件下,利用各测站搭载的接收器检测、处理并记录到达声信号,利用定位声信号设计的先验信息,结合现场测量的声速信息,完成到达时延、径向速度估计,得到时延向量和径向速度向量
12、(1.3)初始位置估计
13、从n个测站中,选取其中的3个测站,编号分别设为1#-3#,其中3#测站为参考测站,对目标位置进行初步估计。
14、目标与测站之间的斜距为:
15、
16、1#、2#测站与3#测站的基线长度为:
17、
18、按下式得到初始位置估计值x0=[x0,y0,z0]t:
19、
20、其中:
21、
22、cosθ=λ1λ2+μ1μ2+ν1ν2,sinθ=(1-cos2θ)1/2
23、步骤二:逐点求解位置、速度参数
24、(2.1)声速修正与位置参数估计
25、根据时延向量可结合声速剖面c(z),按下式计算目标与测站之间的斜距的估计值:
26、
27、其中:
28、
29、进而按下式对目标位置进行估计:
30、
31、其中:
32、
33、(2.2)位置参数迭代计算
34、得到目标位置估计值后,以||δx||2为判据判定是否达到预定的收敛精度;若未达到,则将此位置估计值更新为下次迭代的位置初始值x0,按(2.1)所述方法迭代计算,直至收敛到所需要的精度为止。
35、(2.3)速度参数估计
36、得到满足收敛精度的目标位置估计值后,按下式得到速度参数的估计值:
37、
38、步骤三:估计约束多项式系数,优化位置、速度参数
39、(3.1)多项式系数估计
40、在一个航行序列中,通过步骤二的方法逐点解算,得到位置、速度的参数序列估计值和(其中,时间序列的序列号k=1,2,…,k)。
41、考虑到逐点观测数据不可避免地存在随机误差,造成数据随机“抖动”,以下将位置、速度序列表示为由多项式约束的函数:
42、
43、式中,m(m≥2)、p(p≥2)、q(q≥2)多项式阶数。
44、利用逐点解算得到的位置、速度的参数序列估计值对多项式系数进行估计:
45、
46、其中:
47、
48、由此得到x、y、z三个方向的多项式系数cx=[a0,a1,…,am]、cy=[b0,b1,…,bp]、cz=[c0,c1,…,cq]。
49、(3.2)位置、速度参数优化
50、利用(3.1)中所述的位置、速度多项式约束的函数x(t)、y(t)、z(t)、代入多项式系数cx、cy和cz,得到优化的位置、速度参数序列和(其中,时间序列的序列号k=1,2,…,k)。
51、本发明的有益效果:该方法是一种利用声信标和多测站搭载接收设备实现不依赖航行体本身条件下的水下运动速度测量技术,充分考虑了水声信道对测量的影响以及造成的序列数据波动,实现了适应复杂航行工况下的基于多项式约束的位置、速度参数的可靠估计,解决了高动态运动条件下观测运动的函数化表达及连续、平滑运动参数提供问题,对水下目标复杂运动过程适应性好,技术应用前景广阔,可为航行体水下运动性能分析评估提供数据处理与分析技术。
- 还没有人留言评论。精彩留言会获得点赞!