一种可旋转的卵形扫描式机载测深激光雷达系统及定位方法
本发明属于机载测深激光雷达系统,特别涉及一种可旋转的卵形扫描式机载测深激光雷达系统及定位方法。
背景技术:
1、机载测深激光雷达系统(alb)是一种通过主动发射532nm波长的蓝绿激光脉冲实现水下地形测绘的先进技术,可同时接受来自水域和陆域的回波信号,实现水陆联合观测。alb测量效率高,测点密集,不受地形限制,可适用于内陆河流、红树林、海岸带等传统船载声呐测深难以作业的水域。除基本的水深测量功能外,alb还可应用于水边线探测,提供的测绘数据是水利、交通等涉水工程建设及运行的重要依据,为防洪减灾、水资源管理、海岸带资源保护与开发等领域提供技术支撑。
2、卵形扫描式机载测深激光雷达的扫描轨迹为卵形,通常将扫描轨迹的长轴设置为垂直于飞行方向,使旁向扫描角最大化,提高旁向重叠度。在只需单条航带的测量场景中,例如水边线探测或者内陆狭窄河道水深测量,通过旋转激光雷达使扫描轨迹的长轴方向与水边线或者河道方向平行,可有效减少测量带宽,提高航向重叠度,在保持目标区域测点密度的同时提升测量效率。总体而言,alb系统的扫描轨迹长短轴方向可变可大大提高测量灵活性,使其能够更好适用于多种应用场景,从而保证测量质量和效率。
3、目前公开的激光测深技术方案中,已有多款激光测深系统,包括星载、机载、船载多种搭载方式,例如一种星载激光近海岸地形探测激光雷达及探测方法专利(cn112526482a)、单频测水激光雷达(cn114167436a)、一种测量水深的方法及激光雷达系统(cn106871990a)、无缝集成激光雷达和无人船的水深测量系统(cn114236556a)。然而,现有公开的激光测深方案中尚未涉及扫描轨迹长短轴方向可变的设计。
技术实现思路
1、本发明的目的在于提供一种可旋转的卵形扫描式机载测深激光雷达系统及定位方法,用以解决机载测深激光雷达系统的扫描轨迹长短轴方向不可变的问题,使机载测深激光雷达系统能够更好适用于多种应用场景,保证测量的质量和效率。
2、为了实现上述目的,根据本发明的一个方面,本发明提供一种可旋转的卵形扫描式机载测深激光雷达系统,包括:
3、机载测深激光雷达,采用卵形扫描方式,用于发射激光脉冲并接收回波信息来获取目标点的斜距;
4、可旋转的激光雷达安置架,用于将所述激光雷达固定在飞行载体上;
5、定姿定位系统,用于获取所述飞行载体的空间位置和姿态信息。
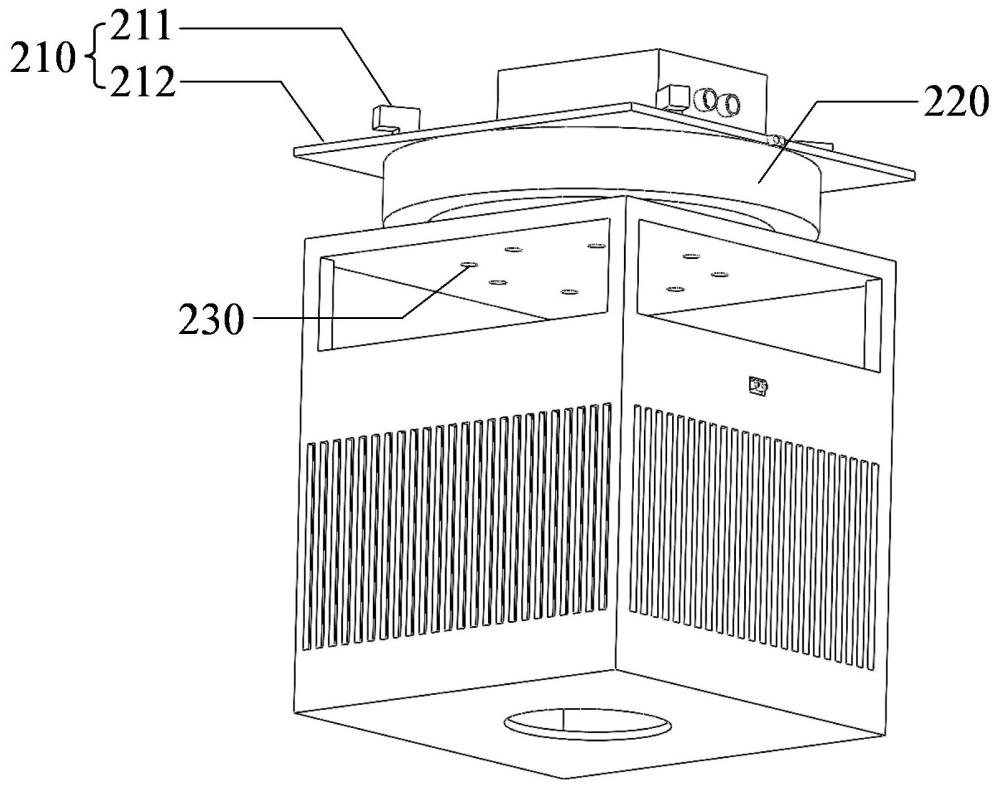
6、在所述的一种可旋转的卵形扫描式机载测深激光雷达系统中,所述可旋转的激光雷达安置架包括连接机构、中空负载旋转台和螺栓组件;
7、在所述的可旋转的激光雷达安置架中,所述连接机构包括悬臂卡扣组件和连接板,所述悬臂卡扣组件包括多个悬臂卡扣,所述连接板固定在中空负载旋转台的顶端,通过所述悬臂卡扣与所述飞行载体底端上的与所述悬臂卡扣配套的凸起相连;
8、在所述可旋转的激光雷达安置架中,所述中空负载旋转台底端通过所述螺栓组件与所述激光雷达顶端相连,所述中空负载旋转台采用步进电机驱动,通过控制所述电机转动使所述激光雷达旋转;
9、在所述的可旋转的激光雷达安置架,其特征在于,所述螺栓组件包括多个沿所述中空负载旋转台外围圆形排布的螺栓,每个螺栓均与所述中空负载旋转台和所述激光雷达顶部螺纹连接。
10、本发明还提供了一种可旋转的卵形扫描式机载测深激光雷达系统定位方法,包括:
11、s1:设置中空负载旋转台电机的旋转角度;
12、s2:获取激光从发射点到目标点分别在空气和水下的传播斜距、机载测深激光雷达反射镜驱动电机转角、定姿定位系统中心的三维坐标(wgs-84)、飞行载体的姿态角;
13、s3:根据所述中空负载旋转台电机的旋转角度、所述激光在空气中和水下的传播斜距以及所述驱动电机转角,计算目标点在激光扫描参考坐标系中的三维坐标;
14、s4:利用全站仪量取所述激光雷达反射镜中心到所述定姿定位系统中心的偏心改正量,将所述目标点在激光扫描参考坐标系中的三维坐标转换到载体坐标系中;
15、s5:根据所述飞行载体的姿态角,将所述目标点在载体坐标系中的三维坐标转换到导航坐标系中;
16、s6:将所述定姿定位系统中心在大地坐标系(wgs-84)中的三维坐标转换到地心地固坐标系中,并结合所述目标点在所述导航坐标系中的三维坐标,计算目标点在所述地心地固坐标系中的三维坐标;
17、s7:将所述目标点在所述地心地固坐标系中的三维坐标转换到所述大地坐标系中。
18、在所述的一种可旋转的卵形扫描式机载测深激光雷达系统定位方法中,s3包括:
19、定义激光扫描坐标系:以所述反射镜中心为坐标原点o,建立所述激光扫描坐标系o-xyz,z轴垂直所述飞行载体向上,x轴为所述入射激光的反方向,y轴与x轴构成右手空间直角坐标系,入射激光和所述驱动电机转轴位于同一个平面(xz面);
20、定义激光扫描辅助坐标系:将所述激光扫描坐标系以o为中心绕y轴逆时针旋转45°,建立所述激光扫描辅助坐标系o-x′y′z′;
21、反射镜法线在所述激光扫描辅助坐标系中的方向矢量:
22、;
23、根据所述激光扫描坐标系与所述激光扫描辅助坐标系之间的转换关系,得到所述反射镜法线在所述激光扫描坐标系中的方向矢量:
24、
25、所述反射镜法线在xz面的投影与z轴的夹角φfx:
26、;
27、根据几何关系,反射光线在xz平面的投影与z轴的夹角φx:
28、;
29、所述反射镜法线在yz面的投影与z轴的夹角φfy:
30、;
31、根据几何关系,所述反射光线在xy平面的投影与z轴的夹角φy:
32、;
33、根据φx和φy,求得扫描角φ:
34、;
35、根据所述扫描角φ,求得所述反射镜中心到激光水面入射点的垂距,其中,d1为所述激光在空气中的传播斜距;
36、根据几何关系,求得所述激光水面入射点s在所述激光扫描坐标系下的三维坐标:
37、;
38、进而求得方位角);
39、根据斯涅尔定律,求得激光水面折射角,进而求得水深,其中,d2为所述激光在水下的传播斜距;
40、根据几何关系,求得激光水底入射点f在所述激光扫描坐标系下的三维坐标:
41、;
42、定义所述激光扫描参考坐标系:以所述反射镜中心为坐标原点o,建立激光扫描参考坐标系o-x′′y′′z′′,y′′轴为飞行方向,z′′轴垂直所述飞行载体向上,x′′轴与y′′z′′轴构成右手空间直角坐标系;
43、令中空负载旋转台电机的旋转角度为0°时,所述激光扫描坐标系的y轴指向飞行方向,即o-xyz和o-x′′y′′z′三轴同向,当空负载旋转台电机顺时针旋转时带动所述激光雷达以所述反射中心为原点顺时针旋转,即所述激光扫描坐标系以o为中心绕y轴顺时针旋转;
44、所述激光扫描参考坐标系与所述激光扫描坐标系之间转换关系:
45、;
46、其中,为所述中空负载旋转台电机的旋转角度;
47、根据所述转换关系,求得中空负载旋转台电机的旋转角度为时,所述激光水面入射点s在所述激光扫描参考坐标系下的三维坐标:
48、;
49、所述激光水底入射点f在所述激光扫描坐标系下的三维坐标:
50、。
51、与现有技术相比,本发明具有以下优势:首先,本发明设计了一种可旋转的激光雷达安置架,通过设置中空负载旋转台电机的旋转角度,带动卵形扫描式机载测深激光雷达进行旋转,从而使扫描轨迹的长短轴方向能够根据实际需求灵活调整。其次,本发明提出了一种可旋转的卵形扫描式机载测深激光雷达系统定位方法,根据中空负载旋转台电机的旋转角度计算目标激光点的空间位置。通过实现卵形扫描式机载测深激光雷达系统扫描轨迹的长短轴方向可变,能够显著提高测量灵活性,使其更加适应多种应用场景,从而有效保证测量质量与效率。
- 还没有人留言评论。精彩留言会获得点赞!