一种AI智能工程测量机器人及其测量方法
本发明涉及工程测量,具体为一种ai智能工程测量机器人及其测量方法。
背景技术:
1、工程测量是研究各种工程建设在勘测设计、施工建设和运营管理阶段所进行的各种测量工作,它主要涉及测量学和测量工程学的基础理论,以及在各种工程(如城市建设、交通、水利、矿山、海洋建筑、大型精密设备安装等)的勘测设计、施工及运营各阶段测绘工作的理论、技术和方法,工程测量学不仅研究地球空间中具体几何实体的测量描绘,还涉及抽象几何实体的测设实现的理论方法和技术;
2、目前,市面上的智能工程测量装置在进行使用时,需要先把智能工程测量装置底部支架定位在需要测量的位置上,进而再使用智能工程测量装置进行测量,在实际使用中,当智能工程测量装置底部支架固定时,因智能工程测量装置底部支架大多数通过螺栓与地面连接接,或临时用其他物品对设备底部支架进行挤压固定,致使后续智能工程测量装置进行高度以及角度调节太过于麻烦,进而影响后续智能工程测量装置的工作效率,同时现有的智能工程测量装置功能过于单一,并不能够结合现有技术中先进的ai技术,导致在测量时不仅繁琐且进度慢;
3、为此,本专利提出一种ai智能工程测量机器人及其测量方法来解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种ai智能工程测量机器人及其测量方法,解决了因智能工程测量装置底部支架大多数通过螺栓与地面连接,或临时用其他物品对设备底部支架进行挤压固定,致使后续智能工程测量装置进行高度以及角度调节太过于麻烦的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:一种ai智能工程测量机器人,包括定位台,所述定位台的外侧两端均固定连接有固定块,一侧所述固定块的下端固定连接有电机二,所述电机二的输出端贯穿固定块向上设置有丝杠二,所述丝杠二上螺纹连接有螺纹块二,所述螺纹块二的内端固定连接有驱动台;
5、所述驱动台的内部安装有驱动电机,所述驱动电机的输出端贯穿向上设置有承托台,所述承托台的外端安装有操作屏,所述承托台的内部开设有开槽,所述开槽的内侧中部同样固定连接有驱动电机,所述驱动电机的输出端固定连接有转动板;
6、所述转动板的四端均固定连接有转轴五,所述转轴五的内部转动连接有转动杆,所述转动杆的另一端转动连接有转轴四,所述转轴四的另一端固定连接有连接板,所述连接板贯穿承托台向上固定连接有夹板,所述夹板的内端对应设置有ai智能测量仪。
7、优选的:另一侧所述固定块的上端固定连接有滑杆,所述滑杆上滑动连接有滑块一,且滑块一的内端同样与驱动台固定连接,所述丝杠二以及滑杆的顶部固定连接有限位板。
8、优选的:所述开槽的内侧底部开设有滑槽二,所述连接板的下端固定连接有滑块三,所述滑块三滑动连接在滑槽二的内部。
9、优选的:所述承托台的上方四端开设有滑槽一,所述连接板与夹板的连接处固定连接有滑块二,所述滑块二滑动连接在滑槽一的内部。
10、优选的:所述定位台的外侧固定连接有三个转轴一,所述转轴一的内部转动连接有支架。
11、优选的:所述定位台的下方中部固定连接有定位柱,所述定位柱的内部开设有安装槽。
12、优选的:所述安装槽的内部转动连接有丝杠一,所述丝杠一上螺纹连接有螺纹块一,所述螺纹块一贯穿安装槽向外固定连接有活动块。
13、优选的:所述活动块的外侧三端固定连接有转轴三,所述转轴三的内部转动连接有连接杆,所述连接杆的另一端转动连接有转轴二,所述转轴二的另一端固定连接在支架上。
14、优选的:所述定位台的下方一端固定连接有电机一,所述电机一的输出端固定连接有转杆,所述转杆上固定连接有齿轮二,所述丝杠一上固定连接有齿轮一,所述齿轮一与齿轮二相互啮合。
15、一种ai智能工程测量机器人的测量方法,基于上述任意一项所述的一种ai智能工程测量机器人,包括以下具体测量步骤:
16、s1、将ai智能测量仪放置在承托台的上端,启动开槽的内部驱动电机,带动转动板进行转动,在转轴四以及转轴五的相互转动作用下带动四个连接板逐渐靠近,并且在滑块二以及滑槽一的作用下能够带动夹板进行移动,完成对ai智能测量仪的定位夹持,以确保ai智能测量仪在使用时的稳定性,同时将ai智能测量仪与操作屏进行无线连接;
17、s2、将整个装置放置在合适的位置,启动电机一带动齿轮二进行转动,在啮合的作用下能够带动齿轮一以及丝杠一进行转动,在螺纹连接的作用下能够带动螺纹块一以及活动块向外运动,同时在转轴三以及转轴二的作用下能够使得外端的三对支架逐渐展开,以确保对整个测量组件的支撑效果;
18、s3、需要进行高度以及旋转调节时,启动电机二带动丝杠二进行转动,在螺纹连接的作用下能够使得螺纹块二带动驱动台进行升降调节,对测量组件的高度做出调节,并且启动驱动台的内部电机同样能够带动测量组件进行旋转调节,确保智能化、自动化的检测作业;
19、s4、检测时,基于rtk测量出控制点的坐标,然后通过ai智能测量仪中的ar摄像头对当前环境进行空间识别,生成当前环境的三维空间,再利用三维空间中控制点与待测点的距离,计算出待测点的坐标,虽然同样是借助控制点进行计算,但是利用了ar摄像头对场景识别,构建出三维空间,解决了控制点与待测点之间必须是直线且无阻碍物的问题,同时,结合测量平差,计算出待测点的坐标,满足工程测量的厘米级别测量精度。
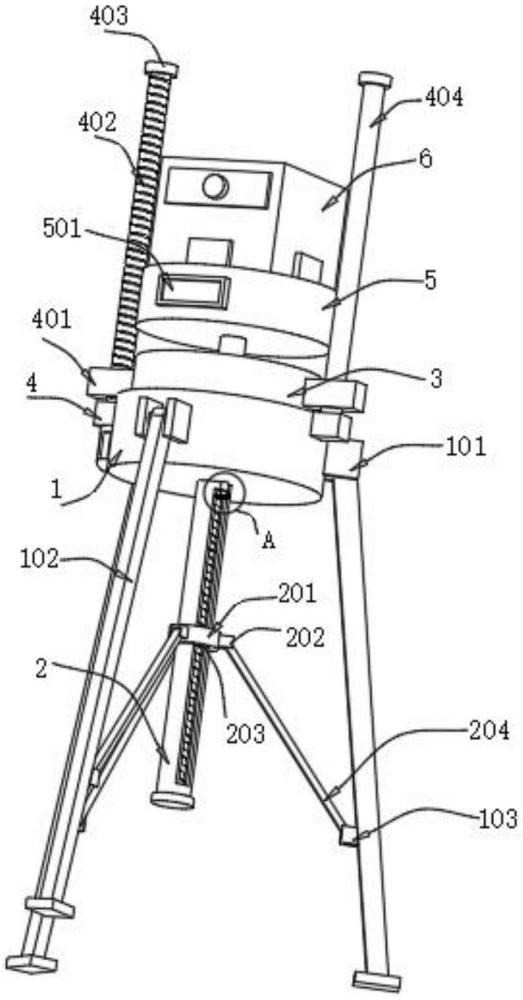
20、工作原理:将ai智能测量仪6放置在承托台5的上端,启动开槽506的内部驱动电机,带动转动板509进行转动,在转轴四508以及转轴五5012的相互转动作用下带动四个连接板507逐渐靠近,并且在滑块二503以及滑槽一504的作用下能够带动夹板502进行移动,完成对ai智能测量仪6的定位夹持,以确保ai智能测量仪6在使用时的稳定性,同时将ai智能测量仪6与操作屏501进行无线连接,将整个装置放置在合适的位置,启动电机一206带动齿轮二2010进行转动,在啮合的作用下能够带动齿轮一207以及丝杠一205进行转动,在螺纹连接的作用下能够带动螺纹块一203以及活动块201向外运动,同时在转轴三202以及转轴二103的作用下能够使得外端的三对支架102逐渐展开,以确保对整个测量组件的支撑效果,需要进行高度以及旋转调节时,启动电机二406带动丝杠二402进行转动,在螺纹连接的作用下能够使得螺纹块二401带动驱动台3进行升降调节,对测量组件的高度做出调节,并且启动驱动台3的内部电机同样能够带动测量组件进行旋转调节,确保智能化、自动化的检测作业,检测时,基于rtk测量出控制点的坐标,然后通过ai智能测量仪6中的ar摄像头对当前环境进行空间识别,生成当前环境的三维空间,再利用三维空间中控制点与待测点的距离,计算出待测点的坐标,虽然同样是借助控制点进行计算,但是利用了ar摄像头对场景识别,构建出三维空间,解决了控制点与待测点之间必须是直线且无阻碍物的问题,同时,结合测量平差,计算出待测点的坐标,满足工程测量的厘米级别测量精度。
21、(三)有益效果
22、本发明提供了一种ai智能工程测量机器人及其测量方法,具备以下有益效果:
23、1、本发明通过将ai智能测量仪放置在承托台上,内部的驱动组件带动转轴组件进行活动,实现四个夹板的相对运动,对ai智能测量仪进行定位夹持,以确保ai智能测量仪在测量时的稳定性以及高效性,同时本专利通过设置驱动台以及丝杠二能够完成对ai智能测量仪的高度以及旋转调节,根据不同的使用场景做出自动化调节,以便于提高对工程测量的精准性以及适用性;
24、2、本发明通过在设备底部设置定位柱、电机一以及齿轮组件能够使得螺纹块带动活动块进行升降调节完成支架的自动展开,无需人工进行手动调节,省时省力的同时能够适用于不同的检测场景;
25、3、本发明通过将ai处理系统并入至测量仪的内部,通过ai智能测量仪6中的ar摄像头对当前环境进行空间识别,生成当前环境的三维空间,再利用三维空间中控制点与待测点的距离,计算出待测点的坐标,满足工程测量的厘米级别测量精度。
- 还没有人留言评论。精彩留言会获得点赞!