一种古文物的变化监测方法、变化监测装置、设备及介质与流程
本技术涉及文物监测,尤其是涉及一种古文物的变化监测方法、变化监测装置、设备及介质。
背景技术:
1、古文物的变化监测是文物保护的重要手段。及时、准确发现古文物的变化并以量化的方式进行报告,对文物保护和文物修复都有着重要的作用。
2、目前,常见的古文物变化监测方法包括定期采集高清图像和视频,对于特定时间节点的文物状态可以进行较好的保存。但是采集周期不固定,往往需要人工操作,并且人工很难从图像和视频中准确的发现古文物的细微变化。因此,如何高效且准确的对古文物的变化情况进行监测成为了不容忽视的技术问题。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种古文物的变化监测方法、变化监测装置、设备及介质,使用古文物的历史局部图像和当前局部图像进行差值计算,可以及时发现古文物表面的异常变化,进而触发监测流程,当差值图像满足预设条件时,将古文物当前的点云数据和历史扫描的三维模型进行对比,计算得到准确的变化数据,提高了对于古文物变化监测的准确率和效率,从而为后续的文物保护、文物修复提供可靠的图像和点云参考依据。
2、第一方面,本技术实施例提供了一种古文物的变化监测方法,所述变化监测方法包括:
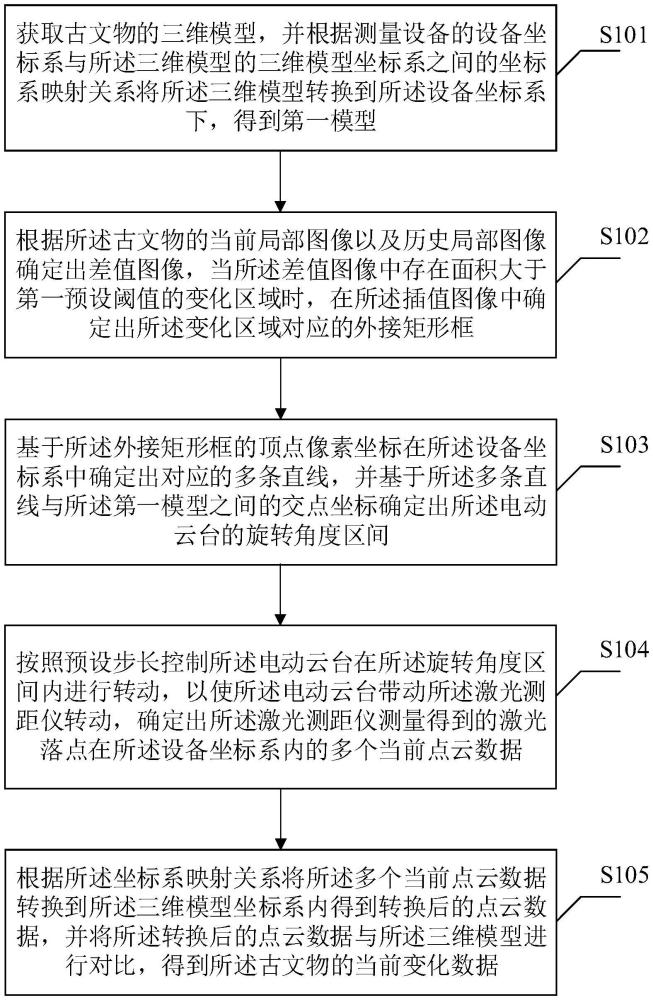
3、获取古文物的历史三维模型,并根据测量设备的设备坐标系与所述历史三维模型的三维模型坐标系之间的坐标系映射关系将所述历史三维模型转换到所述设备坐标系下,得到第一模型;其中,所述测量设备包括电动云台以及安装在所述电动云台上的激光测距仪;
4、根据所述古文物的当前局部图像以及历史局部图像确定出差值图像,当所述差值图像中存在面积大于第一预设阈值的变化区域时,在所述差值图像中确定出所述变化区域对应的外接矩形框;
5、基于所述外接矩形框的顶点像素坐标在所述设备坐标系中确定出对应的多条直线,并基于所述多条直线与所述第一模型之间的交点坐标确定出所述电动云台的旋转角度区间;
6、按照预设步长控制所述电动云台在所述旋转角度区间内进行转动,以使所述电动云台带动所述激光测距仪转动,确定出所述激光测距仪测量得到的激光落点在所述设备坐标系内的多个当前点云数据;
7、根据所述坐标系映射关系将所述多个当前点云数据转换到所述三维模型坐标系内得到转换后的点云数据,并将所述转换后的点云数据与所述历史三维模型进行对比,得到所述古文物的当前变化数据。
8、进一步的,所述电动云台至少包括水平旋转轴和垂直旋转轴,所述基于所述多条直线与所述第一模型之间的交点坐标确定出所述电动云台的旋转角度区间,包括:
9、针对于每条直线,在所述设备坐标系中确定出该直线与所述第一模型之间的交点坐标;
10、利用极坐标系原理,根据该交点坐标确定出所述电动云台的云台旋转角度;其中,所述电动云台旋转到所述云台旋转角度时所述激光测距仪对准所述交点坐标;
11、从多个云台旋转角度分别确定出最小水平旋转角度、最大水平旋转角度、最小垂直旋转角度以及最大垂直旋转角度,以得到所述旋转角度区间。
12、进一步的,通过下述步骤获取所述古文物的历史三维模型:
13、获取三维扫描仪对所述古文物的表面进行扫描时所得到的文物点云数据;
14、对所述文物点云数据进行三维点云数据处理,以得到所述古文物的历史三维模型。
15、进一步的,通过下述步骤建立所述设备坐标系与所述三维模型坐标系之间的坐标系映射关系:
16、通过所述测量设备对视觉特征点进行测量,以得到所述视觉特征点在所述设备坐标系中的空间坐标;
17、获取所述视觉特征点在所述三维模型坐标系中的三维坐标,并利用所述空间坐标和所述三维坐标建立所述坐标系映射关系。
18、进一步的,所述根据所述古文物的当前局部图像以及历史局部图像确定出差值图像,包括:
19、通过特征点匹配算法对所述当前局部图像以及所述历史局部图像进行特征点匹配,计算得到单应性矩阵;
20、利用所述单应性矩阵对所述当前局部图像进行变换,得到变换图像;
21、将所述变换图像的灰度图像作为第一图像,将所述历史局部图像的灰度图像作为第二图像;
22、计算所述第一图像和所述第二图像在相同像素坐标上的灰度差值,以得到灰度差值图像;
23、将所述灰度差值图像中灰度差值大于第二预设阈值的像素设置为白色,其他像素设置为黑色,以得到所述差值图像。
24、进一步的,在所述得到所述古文物的当前变化数据之后,所述变化监测方法还包括:
25、将所述古文物的所述当前局部图像、所述历史局部图像以及所述当前变化数据发送至用户终端。
26、第二方面,本技术实施例还提供了一种古文物的变化监测装置,所述变化监测装置包括:
27、模型获取模块,用于获取古文物的历史三维模型,并根据测量设备的设备坐标系与所述历史三维模型的三维模型坐标系之间的坐标系映射关系将所述历史三维模型转换到所述设备坐标系下,得到第一模型;其中,所述测量设备包括电动云台以及安装在所述电动云台上的激光测距仪;
28、外接矩形框确定模块,用于根据所述古文物的当前局部图像以及历史局部图像确定出差值图像,当所述差值图像中存在面积大于第一预设阈值的变化区域时,在所述差值图像中确定出所述变化区域对应的外接矩形框;
29、旋转角度区间确定模块,用于基于所述外接矩形框的顶点像素坐标在所述设备坐标系中确定出对应的多条直线,并基于所述多条直线与所述第一模型之间的交点坐标确定出所述电动云台的旋转角度区间;
30、点云数据确定模块,用于按照预设步长控制所述电动云台在所述旋转角度区间内进行转动,以使所述电动云台带动所述激光测距仪转动,确定出所述激光测距仪测量得到的激光落点在所述设备坐标系内的多个当前点云数据;
31、变化数据确定模块,用于根据所述坐标系映射关系将所述多个当前点云数据转换到所述三维模型坐标系内得到转换后的点云数据,并将所述转换后的点云数据与所述历史三维模型进行对比,得到所述古文物的当前变化数据。
32、进一步的,所述电动云台至少包括水平旋转轴和垂直旋转轴,所述旋转角度区间确定模块在用于基于所述多条直线与所述第一模型之间的交点坐标确定出所述电动云台的旋转角度区间时,所述旋转角度区间确定模块还用于:
33、针对于每条直线,在所述设备坐标系中确定出该直线与所述第一模型之间的交点坐标;
34、利用极坐标系原理,根据该交点坐标确定出所述电动云台的云台旋转角度;其中,所述电动云台旋转到所述云台旋转角度时所述激光测距仪对准所述交点坐标;
35、从多个云台旋转角度分别确定出最小水平旋转角度、最大水平旋转角度、最小垂直旋转角度以及最大垂直旋转角度,以得到所述旋转角度区间。
36、第三方面,本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的古文物的变化监测方法的步骤。
37、第四方面,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的古文物的变化监测方法的步骤。
38、本技术实施例所提供的古文物的变化监测方法、变化监测装置、设备及介质,首先,获取古文物的历史三维模型,并根据测量设备的设备坐标系与所述历史三维模型的三维模型坐标系之间的坐标系映射关系将所述历史三维模型转换到所述设备坐标系下,得到第一模型;其中,所述测量设备包括电动云台以及安装在所述电动云台上的激光测距仪;然后,根据所述古文物的当前局部图像以及历史局部图像确定出差值图像,当所述差值图像中存在面积大于第一预设阈值的变化区域时,在所述差值图像中确定出所述变化区域对应的外接矩形框;基于所述外接矩形框的顶点像素坐标在所述设备坐标系中确定出对应的多条直线,并基于所述多条直线与所述第一模型之间的交点坐标确定出所述电动云台的旋转角度区间;按照预设步长控制所述电动云台在所述旋转角度区间内进行转动,以使所述电动云台带动所述激光测距仪转动,确定出所述激光测距仪测量得到的激光落点在所述设备坐标系内的多个当前点云数据;最后,根据所述坐标系映射关系将所述多个当前点云数据转换到所述三维模型坐标系内得到转换后的点云数据,并将所述转换后的点云数据与所述历史三维模型进行对比,得到所述古文物的当前变化数据。
39、本技术使用古文物的历史局部图像和当前局部图像进行差值计算,可以及时发现古文物表面的异常变化,进而触发监测流程,当差值图像满足预设条件时,将古文物当前的点云数据和历史扫描的三维模型进行对比,计算得到准确的变化数据,提高了对于古文物变化监测的准确率和效率,从而为后续的文物保护、文物修复提供可靠的图像和点云参考依据。
40、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!