地图更新方法、装置、存储介质、电子装置以及程序产品与流程
本发明实施例涉及通信领域,具体而言,涉及一种地图更新方法、装置、存储介质、电子装置以及程序产品。
背景技术:
1、地图由于可以为车辆行驶提供精确的道路信息,因此对于车辆的路径规划、障碍物识别以及安全行驶至关重要。相关技术中的地图更新方法由于需要根据人工确定出的待更新信息进行地图更新,因此,存在人工依赖性较强、实时性较差的问题。
技术实现思路
1、本发明实施例提供了一种地图更新方法、装置、存储介质、电子装置以及程序产品,以至少解决相关技术中由于需要根据人工确定出的待更新信息进行地图更新,因此存在的人工依赖性较强、实时性较差的问题。
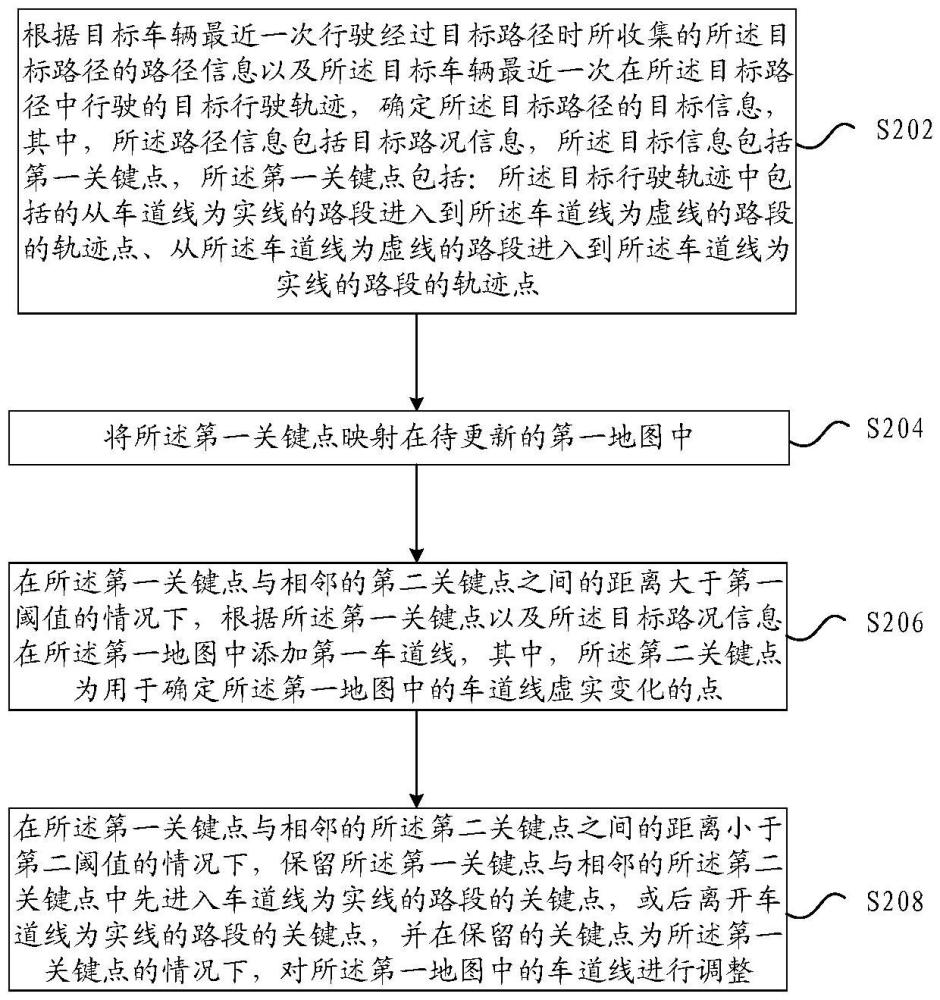
2、根据本发明的一个实施例,提供了一种地图更新方法,包括:根据目标车辆最近一次行驶经过目标路径时所收集的所述目标路径的路径信息以及所述目标车辆最近一次在所述目标路径中行驶的目标行驶轨迹,确定所述目标路径的目标信息,其中,所述路径信息包括目标路况信息,所述目标信息包括第一关键点,所述第一关键点包括:所述目标行驶轨迹中包括的从车道线为实线的路段进入到所述车道线为虚线的路段的轨迹点、从所述车道线为虚线的路段进入到所述车道线为实线的路段的轨迹点;将所述第一关键点映射在待更新的第一地图中;在所述第一关键点与相邻的第二关键点之间的距离大于第一阈值的情况下,根据所述第一关键点以及所述目标路况信息在所述第一地图中添加第一车道线,其中,所述第二关键点为用于确定所述第一地图中的车道线虚实变化的点;在所述第一关键点与相邻的所述第二关键点之间的距离小于第二阈值的情况下,保留所述第一关键点与相邻的所述第二关键点中先进入车道线为实线的路段的关键点,或后离开车道线为实线的路段的关键点,并在保留的关键点为所述第一关键点的情况下,对所述第一地图中的车道线进行调整。
3、在一个示例性实施例中,所述目标信息还包括:第三关键点,所述第三关键点包括:所述目标行驶轨迹中包括的从无车道线的路段进入到有车道线的路段的轨迹点、从有车道线的路段进入到无车道线的路段的轨迹点;在根据目标车辆最近一次行驶经过目标路径时所收集的所述目标路径的路径信息以及所述目标车辆最近一次在所述目标路径中行驶的目标行驶轨迹,确定所述目标路径的目标信息之后,所述方法还包括:将所述第三关键点映射在所述第一地图中;在所述第三关键点与相邻的第四关键点之间的距离大于第三阈值的情况下,根据所述第三关键点以及所述目标路况信息在所述第一地图中添加第二车道线,其中,所述第四关键点为用于确定所述第一地图中的车道线有无变化的点;在所述第三关键点与相邻的所述第四关键点之间的距离小于第四阈值的情况下,保留所述第三关键点与相邻的所述第四关键点中后进入有车道线的路段的关键点,或先离开有车道线的路段的关键点,并在保留的关键点为所述第三关键点的情况下,对所述第一地图中的车道线进行调整。
4、在一个示例性实施例中,所述目标信息还包括:限制行驶行为的目标交通标识的目标交通标识信息,所述目标交通标识信息中包括所述目标交通标识的位置信息以及类型信息;在根据目标车辆最近一次行驶经过目标路径时所收集的所述目标路径的路径信息以及所述目标车辆最近一次在所述目标路径中行驶的目标行驶轨迹,确定所述目标路径的目标信息之后,所述方法还包括:获取所述第一地图中限制所述行驶行为的第一交通标识的第一交通标识信息,其中,所述第一交通标识信息中包括所述第一交通标识的位置信息以及类型信息;根据所述目标交通标识信息以及所述第一交通标识信息,确定所述第一地图中是否包含所述目标交通标识;在所述第一地图中不包含所述目标交通标识的情况下,在所述第一地图中添加所述目标交通标识。
5、在一个示例性实施例中,根据所述目标交通标识信息以及所述第一交通标识信息,确定所述第一地图中是否包含所述目标交通标识包括:将所述目标交通标识的位置信息以及类型信息与多个所述第一交通标识中的每一个所述第一交通标识的位置信息以及类型信息进行比对;在不存在与所述目标交通标识类型相同并且距离小于第五阈值的所述第一交通标识的情况下,确定所述第一地图中不包含所述目标交通标识。
6、在一个示例性实施例中,所述路径信息包括:所述目标车辆最近一次行驶经过目标路径时拍摄到的包括所述目标交通标识的目标图像;根据目标车辆最近一次行驶经过目标路径时所收集的所述目标路径的路径信息以及所述目标车辆最近一次在所述目标路径中行驶的目标行驶轨迹,确定所述目标路径的目标信息,包括:根据所述目标图像确定所述目标交通标识信息;根据所述目标交通标识信息以及所述第一交通标识信息,确定所述第一地图中是否包含所述目标交通标识包括:在存在与所述目标交通标识类型相同并且位置小于第五阈值的所述第一交通标识的情况下,将所述目标图像以及所述第一交通标识信息发送到目标终端以请求所述目标终端返回所述第一地图中是否包含所述目标交通标识的指示信息;根据接收到的所述目标终端发送的所述指示信息,确定所述第一地图中是否包含所述目标交通标识。
7、在一个示例性实施例中,所述方法还包括以下至少之一:根据所述第一关键点、所述第三关键点对所述第一地图中的车道线中心线进行调整;在所述目标行驶轨迹中存在异常轨迹段的情况下,删除所述异常轨迹段以得到第一行驶轨迹,将所述第一行驶轨迹添加到所述第一地图中。
8、根据本发明的另一个实施例,提供了一种地图更新装置,包括:第一确定模块,用于根据目标车辆最近一次行驶经过目标路径时所收集的所述目标路径的路径信息以及所述目标车辆最近一次在所述目标路径中行驶的目标行驶轨迹,确定所述目标路径的目标信息,其中,所述路径信息包括目标路况信息,所述目标信息包括第一关键点,所述第一关键点包括:所述目标行驶轨迹中包括的从车道线为实线的路段进入到所述车道线为虚线的路段的轨迹点、从所述车道线为虚线的路段进入到所述车道线为实线的路段的轨迹点;第一映射模块,用于将所述第一关键点映射在待更新的第一地图中;第一添加模块,用于在所述第一关键点与相邻的第二关键点之间的距离大于第一阈值的情况下,根据所述第一关键点以及所述目标路况信息在所述第一地图中添加第一车道线,其中,所述第二关键点为用于确定所述第一地图中的车道线虚实变化的点;第一保留模块,用于在所述第一关键点与相邻的所述第二关键点之间的距离小于第二阈值的情况下,保留所述第一关键点与相邻的所述第二关键点中先进入车道线为实线的路段的关键点,或后离开车道线为实线的路段的关键点,并在保留的关键点为所述第一关键点的情况下,对所述第一地图中的车道线进行调整。
9、根据本发明的又一个实施例,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项方法实施例中的步骤。
10、根据本发明的又一个实施例,还提供了一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项方法实施例中的步骤。
11、根据本发明的又一个实施例,还提供了一种计算机程序产品,上述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现上述任一项方法实施例中的步骤。
12、通过本发明,由于根据目标车辆在最近一次行驶过程中获取到的目标路段的路径信息以及目标车辆在最近一次行驶过程中的行驶轨迹,确定用于对地图进行更新的目标信息,因此,可以解决相关技术中的地图更新方法由于需要根据人工确定出的待更新信息进行地图更新所导致的人工依赖性较强、实时性较差的问题,达到提高地图更新的准确性、实时性的效果。
- 还没有人留言评论。精彩留言会获得点赞!